
Die Drehmomentimpulsrate-Charakteristika eines Schrittmotors beschreiben die Änderung des elektromagnetischen Drehmoments als Funktion der Steprate in Impulsen pro Sekunde (IPS). Es gibt zwei charakteristische Kurven, Kurve 1 und Kurve 2, wie in der folgenden Abbildung dargestellt.
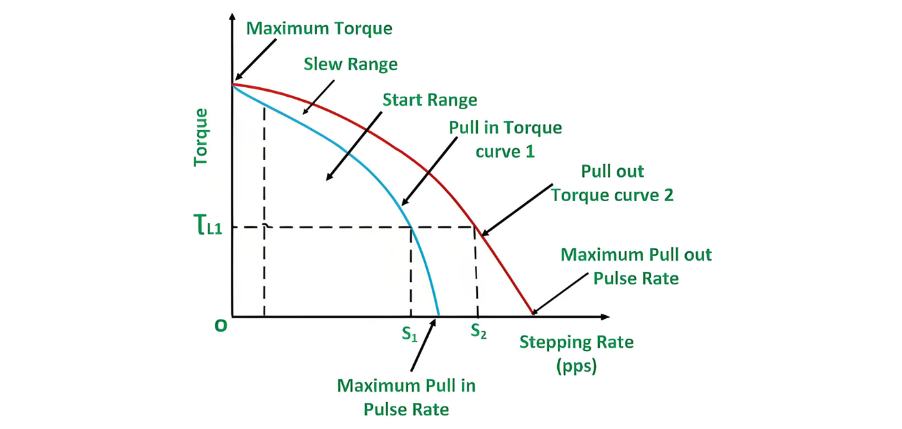
Kurve 1, dargestellt durch eine blaue Linie, wird als Einzugdrehmomentkurve bezeichnet. Sie zeigt die maximale Steprate an, bei der der Motor unter verschiedenen Lastdrehmomenten starten, synchronisieren, stoppen oder umkehren kann. Ähnlich wird Kurve 2, dargestellt durch eine rote Linie, als Auszugdrehmomentcharakteristik bezeichnet. Sie zeigt die maximale Steprate, bei der der Motor unter verschiedenen Lastdrehmomentbedingungen weiterlaufen kann, aber bei dieser Rate ist der Motor nicht in der Lage zu starten, zu stoppen oder umzukehren.
Lassen Sie uns dies an einem Beispiel basierend auf den oben genannten Kurven besser verstehen.
Bei einem Lastdrehmoment von ƮL kann der Motor starten, synchronisieren, stoppen oder umkehren, wenn die Pulsrate niedriger als S1 ist. Sobald der Rotor beginnt sich zu drehen und Synchronisation erreicht, kann die Steprate unter derselben Last erhöht werden. Zum Beispiel, mit einem Lastdrehmoment von ƮL1, nachdem der Motor gestartet und synchronisiert wurde, kann die Steprate bis S2 ohne Verlust der Synchronisation erhöht werden.
Wenn die Steprate S2 übersteigt, verliert der Motor die Synchronisation. Daher stellt der Bereich zwischen Kurve 1 und Kurve 2 den Bereich der Stepraten dar, die verschiedenen Drehmomentwerten entsprechen, innerhalb dessen der Motor nach dem Start und der Synchronisation die Synchronisation aufrechterhalten kann. Dieser Bereich wird als Schlupfbereich bezeichnet, und der Motor arbeitet im Schlupfmodus.










