
Charakteristika pulzní frekvence točivého momentu krokového motoru popisuje změnu elektromagnetického točivého momentu jako funkci frekvence kroků v pulzech za sekundu (PPS). Existují dvě charakteristické křivky, Křivka 1 a Křivka 2, které jsou znázorněny na následujícím obrázku.
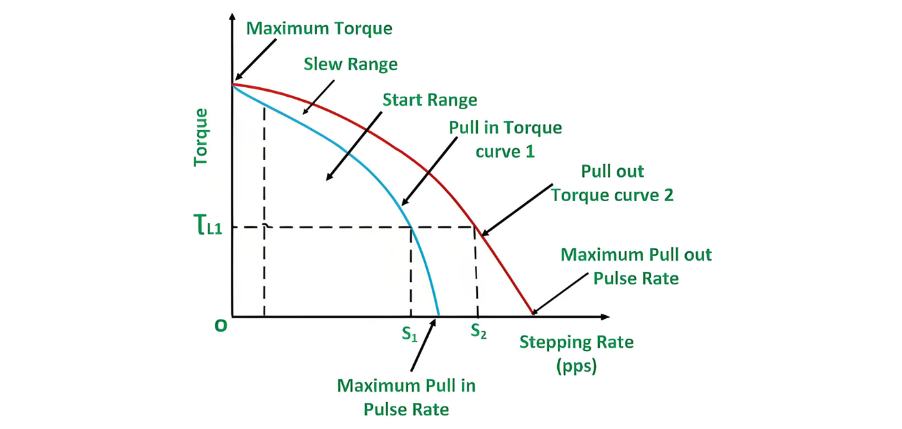
Křivka 1, vyjádřená modrou čarou, je známá jako křivka zatáhnutí. Ukazuje maximální frekvenci kroků, při které může motor startovat, synchronizovat se, zastavit nebo obrátit směr otáčení při různých hodnotách točivého momentu zatěžování. Podobně, Křivka 2, znázorněná červenou čarou, je označována jako křivka uvolnění. Ukazuje maximální frekvenci kroků, při které může motor pokračovat v chodu při různých podmínkách točivého momentu zatěžování, ale při této frekvenci motor není schopen startovat, zastavit nebo obrátit směr otáčení.
Pojďme si prohloubit pochopení s použitím příkladu založeného na těchto křivkách.
Pro točivý moment zatěžování ƮL může motor startovat, synchronizovat se, zastavit nebo obrátit směr otáčení, pokud je pulzní frekvence nižší než S1. Jakmile rotor začne otáčet a dosáhne synchronizace, lze frekvenci kroků zvýšit při stejném zatěžování. Například, s točivým momentem zatěžování ƮL1, po startu a synchronizaci motoru lze frekvenci kroků zvýšit až do S2 bez ztráty synchronizace.
Pokud by frekvence kroků překročila S2, motor by ztratil synchronizaci. Proto oblast mezi Křivkou 1 a Křivkou 2 reprezentuje rozsah frekvencí kroků odpovídajících různým hodnotám točivého momentu, při kterých může motor udržet synchronizaci po startu a synchronizaci. Tento rozsah se nazývá pohybový rozsah a říká se, že motor pracuje v pohybovému režimu.










