
คุณลักษณะอัตราพัลส์แรงบิดของมอเตอร์สเต็ปเปอร์อธิบายการเปลี่ยนแปลงของแรงบิดแม่เหล็กไฟฟ้าตามอัตราการก้าวในหน่วยพัลส์ต่อวินาที (PPS) มีเส้นโค้งลักษณะสองเส้น ซึ่งคือ เส้นโค้ง 1 และเส้นโค้ง 2 แสดงอยู่ในรูปด้านล่าง
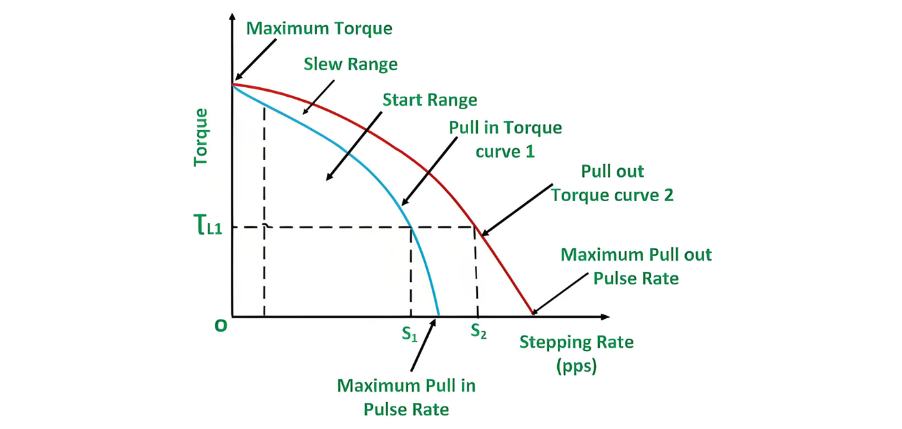
เส้นโค้ง 1 แสดงโดยเส้นสีน้ำเงิน ถูกเรียกว่าเส้นโค้งแรงบิดในการดึงเข้า มันระบุอัตราการก้าวสูงสุดที่มอเตอร์สามารถเริ่มทำงาน ซิงโครไนซ์ หยุด หรือกลับทิศทางภายใต้ค่าแรงบิดโหลดต่าง ๆ เช่นเดียวกัน เส้นโค้ง 2 แสดงโดยเส้นสีแดง ถูกเรียกว่าเส้นโค้งลักษณะแรงบิดในการดึงออก มันแสดงอัตราการก้าวสูงสุดที่มอเตอร์สามารถดำเนินการต่อไปภายใต้สภาพแรงบิดโหลดต่าง ๆ แต่ที่อัตรานี้ มอเตอร์ไม่สามารถเริ่มทำงาน หยุด หรือกลับทิศทางได้
มาทำความเข้าใจมากขึ้นผ่านตัวอย่างบนเส้นโค้งดังกล่าว
สำหรับแรงบิดโหลดเท่ากับ ƮL มอเตอร์สามารถเริ่มทำงาน ซิงโครไนซ์ หยุด หรือกลับทิศทางเมื่ออัตราพัลส์ต่ำกว่า S1 หลังจากโรเตอร์เริ่มหมุนและบรรลุความซิงโครไนซ์ อัตราการก้าวสามารถเพิ่มขึ้นภายใต้โหลดเดียวกัน ตัวอย่างเช่น ด้วยแรงบิดโหลดเท่ากับ ƮL1 หลังจากมอเตอร์เริ่มทำงานและซิงโครไนซ์ อัตราการก้าวสามารถเพิ่มขึ้นจนถึง S2 โดยไม่ทำให้เกิดการสูญเสียการซิงโครไนซ์
หากอัตราการก้าวเกิน S2 มอเตอร์จะสูญเสียการซิงโครไนซ์ ดังนั้น พื้นที่ระหว่างเส้นโค้ง 1 และเส้นโค้ง 2 แทนช่วงอัตราการก้าวที่สอดคล้องกับค่าแรงบิดต่าง ๆ ที่มอเตอร์สามารถรักษาความซิงโครไนซ์หลังจากการเริ่มทำงานและซิงโครไนซ์ ช่วงนี้เรียกว่าช่วงการเลื่อน (slew range) และมอเตอร์จะถูกกล่าวว่าทำงานในโหมดการเลื่อน (slewing mode)










