
ویژگیهای نرخ پالس گشتاور موتور قدمگذار تغییرات گشتاور الکترومغناطیسی را به عنوان تابعی از نرخ گامگذاری در پالس بر ثانیه (PPS) توصیف میکند. دو منحنی مشخصه وجود دارد، منحنی ۱ و منحنی ۲، که در شکل زیر نشان داده شده است.
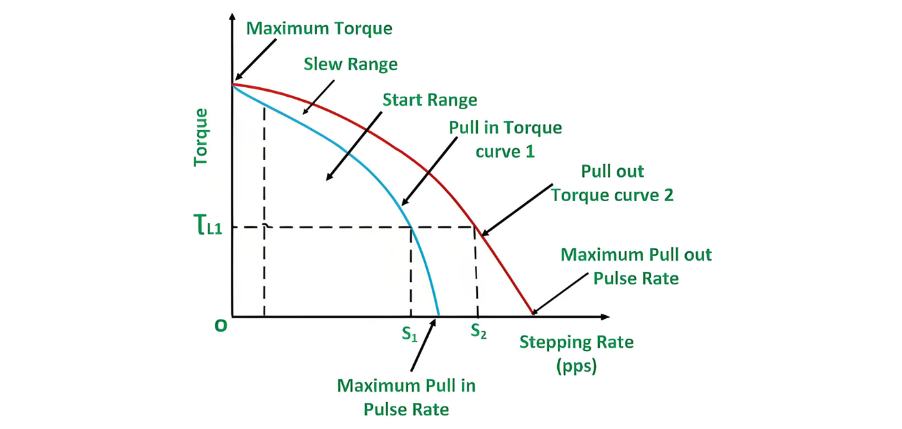
منحنی ۱ با خط آبی نمایش داده میشود و به عنوان منحنی گشتاور جذب شناخته میشود. این منحنی نرخ گامگذاری حداکثری را نشان میدهد که در آن موتور میتواند شروع، همگامسازی، توقف یا معکوس شدن را تحت مقادیر مختلف گشتاور بار انجام دهد. به طور مشابه، منحنی ۲ که با خط قرمز نمایش داده میشود، به عنوان منحنی ویژگی گشتاور خروجی شناخته میشود. این منحنی نرخ گامگذاری حداکثری را نشان میدهد که در آن موتور میتواند تحت شرایط مختلف گشتاور بار ادامه یافتن را داشته باشد، اما در این نرخ، موتور قادر به شروع، توقف یا معکوس شدن نیست.
با یک مثال بر اساس منحنیهای فوق بهتر فهمیده میشود.
برای گشتاور بار ƮL، موتور میتواند شروع، همگامسازی، توقف یا معکوس شدن را وقتی که نرخ پالس کمتر از S1 است انجام دهد. یکبار که روتور شروع به چرخش کرده و همگامسازی را به دست آورده است، نرخ گامگذاری میتواند تحت همان گشتاور بار افزایش یابد. به عنوان مثال، با گشتاور بار ƮL1، پس از شروع و همگامسازی موتور، نرخ گامگذاری میتواند تا S2 افزایش یابد بدون اینکه همگامسازی از دست برود.
اگر نرخ گامگذاری از S2 بیشتر شود، موتور همگامسازی را از دست خواهد داد. بنابراین، منطقه بین منحنی ۱ و منحنی ۲ محدوده نرخهای گامگذاری را نشان میدهد که تحت مقادیر مختلف گشتاور، موتور پس از شروع و همگامسازی میتواند همگامسازی را حفظ کند. این محدوده به عنوان محدوده سوئینگ شناخته میشود و گفته میشود که موتور در حالت سوئینگ عمل میکند.










