
The torque pulse rate characteristics of a stepper motor describe the variation of electromagnetic torque as a function of stepping rate in pulses per second (PPS). There are two characteristic curves, Curve 1 and Curve 2, shown in the figure below.
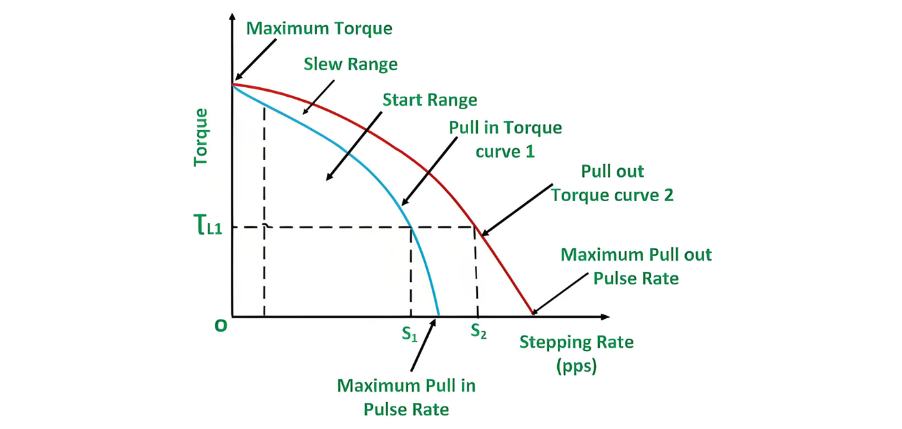
Curve 1, represented by a blue line, is known as the pull-in torque curve. It indicates the maximum stepping rate at which the motor can start, synchronize, stop, or reverse under different load torque values. Similarly, Curve 2, shown as a red line, is called the pull-out torque characteristic curve. It demonstrates the maximum stepping rate at which the motor can continue running under various load torque conditions, but at this rate, the motor is unable to start, stop, or reverse.
Let's gain a better understanding with an example based on the above curves.
For a load torque of ƮL, the motor can start, synchronize, stop, or reverse when the pulse rate is lower than S1. Once the rotor starts rotating and achieves synchronization, the stepping rate can be increased under the same load. For instance, with a load torque of ƮL1, after the motor starts and synchronizes, the stepping rate can be raised up to S2 without losing synchronization.
If the stepping rate exceeds S2, the motor will lose synchronization. Therefore, the area between Curve 1 and Curve 2 represents the range of stepping rates corresponding to different torque values within which the motor can maintain synchronization after being started and synchronized. This range is known as the slew range, and the motor is said to be operating in the slewing mode.










