
Stegmotorns momentpulsfrekvenskaraktäristik beskriver hur det elektromagnetiska momentet varierar som en funktion av stegfrekvensen i puls per sekund (PPS). Det finns två karakteristiska kurvor, Kurva 1 och Kurva 2, som visas i figuren nedan.
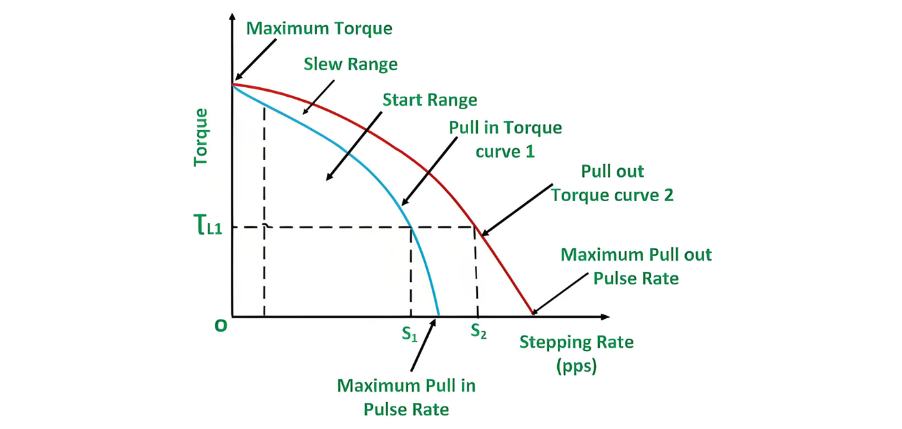
Kurva 1, representerad av en blå linje, kallas dragmomentkurvan. Den visar den maximala stegfrekvens vid vilken motorn kan starta, synkronisera, stoppa eller växla riktning under olika belastningsmomentvärden. På samma sätt, Kurva 2, som visas som en röd linje, kallas utdragningsmomentets karaktäristikkurva. Den demonstrerar den maximala stegfrekvens vid vilken motorn kan fortsätta att köra under olika belastningsmomentvillkor, men vid denna frekvens kan motorn inte starta, stoppa eller växla riktning.
Låt oss få en bättre förståelse genom ett exempel baserat på de ovan nämnda kurvorna.
För ett belastningsmoment på ƮL kan motorn starta, synkronisera, stoppa eller växla riktning när pulsfrekvensen är lägre än S1. När roteraren börjar rotera och uppnår synkronisering kan stegfrekvensen ökas under samma belastning. Till exempel, med ett belastningsmoment på ƮL1, efter att motorn har startat och synkroniserats, kan stegfrekvensen höjas upp till S2 utan att förlora synkroniseringen.
Om stegfrekvensen överstiger S2 kommer motorn att förlora synkronisering. Därför representerar området mellan Kurva 1 och Kurva 2 intervallet av stegfrekvenser som motsvarar olika momentvärden inom vilket motorn kan behålla sin synkronisering efter start och synkronisering. Detta intervall kallas svängningsintervallet, och man säger att motorn fungerar i svängningsläge.










