
Charakterystyka momentu obrotowego impulsowego silnika krokowego opisuje zmianę momentu elektromagnetycznego jako funkcję częstotliwości kroków w impulsach na sekundę (PPS). Istnieją dwie charakterystyczne krzywe, Krzywa 1 i Krzywa 2, przedstawione na poniższym rysunku.
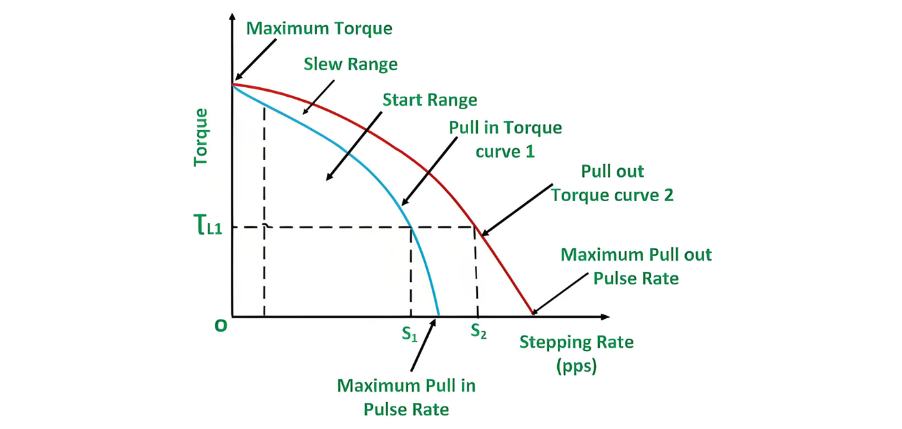
Krzywa 1, reprezentowana niebieską linią, jest znana jako krzywa momentu wciągnięcia. Wskazuje ona maksymalną częstotliwość kroków, przy której silnik może startować, synchronizować się, zatrzymywać lub odwracać pod różnymi wartościami momentu obciążenia. Podobnie, Krzywa 2, przedstawiona czerwoną linią, nazywana jest krzywą charakterystyczną momentu wyrzucania. Pokazuje ona maksymalną częstotliwość kroków, przy której silnik może kontynuować pracę w różnych warunkach obciążenia, ale przy tej częstotliwości silnik nie jest w stanie startować, zatrzymywać się lub odwracać.
Zrozumiajmy to lepiej na przykładzie opartym na powyższych krzywych.
Dla momentu obciążenia ƮL, silnik może startować, synchronizować się, zatrzymywać lub odwracać, gdy częstotliwość impulsów jest niższa niż S1. Gdy rotor zaczyna się obracać i osiąga synchronizację, częstotliwość kroków może być zwiększona przy tym samym obciążeniu. Na przykład, dla momentu obciążenia ƮL1, po rozpoczęciu pracy i synchronizacji silnika, częstotliwość kroków może być zwiększona do S2 bez utraty synchronizacji.
Jeśli częstotliwość kroków przekroczy S2, silnik straci synchronizację. Dlatego obszar między Krzywą 1 a Krzywą 2 reprezentuje zakres częstotliwości kroków odpowiadający różnym wartościom momentu, w którym silnik może utrzymać synchronizację po rozpoczęciu i synchronizacji. Ten zakres nazywany jest zakresem przemieszczania, a silnik działa w trybie przemieszczania.










