
Les característiques de la velocitat de pulsos de torsió d'un motor pas a pas descriuen la variació del torque electromagnètic en funció de la velocitat de passos en pulsos per segon (PPS). Hi ha dues corbes característiques, Corba 1 i Corba 2, mostrades a la figura següent.
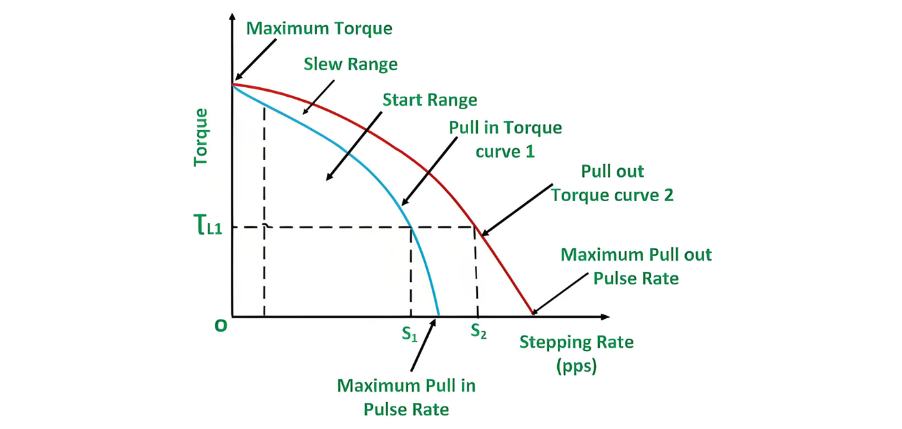
La Corba 1, representada per una línia blava, és coneguda com la corba de torque de captació. Indica la màxima velocitat de passos amb la qual el motor pot iniciar, sincronitzar, aturar o invertir sota diferents valors de torque de càrrega. De manera similar, la Corba 2, mostrada com una línia vermella, es coneix com la corba de característica de torque de desconnexió. Demostra la màxima velocitat de passos amb la qual el motor pot continuar funcionant sota diverses condicions de torque de càrrega, però a aquesta velocitat, el motor no pot iniciar, aturar o invertir.
Guanyem una millor comprensió amb un exemple basat en les corbes anteriors.
Per a un torque de càrrega de ƮL, el motor pot iniciar, sincronitzar, aturar o invertir quan la velocitat de pulsos és inferior a S1. Un cop el rotor comença a girar i assolint la sincronització, la velocitat de passos pot augmentar sota la mateixa càrrega. Per exemple, amb un torque de càrrega de ƮL1, després que el motor inicia i sincronitza, la velocitat de passos pot augmentar fins a S2 sense perdre la sincronització.
Si la velocitat de passos supera S2, el motor perd la sincronització. Per tant, l'àrea entre la Corba 1 i la Corba 2 representa l'interval de velocitats de passos corresponents a diferents valors de torque dins del qual el motor pot mantenir la sincronització després d'haver iniciat i sincronitzat. Aquest interval es coneix com a rang de balanç, i es diu que el motor opera en mode de balanç.










