১২টন ভারী ডিউটি AGV



মূল বৈশিষ্ট্য
| ব্র্যান্ড | Wone Store |
| মডেল নম্বর | ১২টন ভারী ডিউটি AGV |
| নির্দিষ্ট ওজন | 12 ton |
| সিরিজ | LY-AK-12T |
সরবরাহকারী প্রদত্ত পণ্য বর্ণনা
AGV সাসপেনশন পদ্ধতি: স্প্রিং, হাইড্রলিক
AGV গতিবেগ: অভ্যন্তরীণ AGV এর গতিবেগ 0-60মি/মিনিট। যদি গতিবেগ বেশি হয়, তবে তা প্রকৃত পরিস্থিতির উপর নির্ভর করে। তবে, সাধারণ উৎপাদন প্রতিষ্ঠানের সাইট পরিবেশ, কর্মীদের নিরাপত্তা এবং AGV কাজ করার সময় লোডের ওজন বিবেচনায় নিয়ে, এটি অনুসারে গতিবেগ 30মি/মিনিট ছাড়িয়ে না যাওয়াই উচিত। (ট্রান্সফর্মার শিল্পের অতি পাতলা মান গাড়ির জন্য 20মি/মিনিট) বাইরের গাড়ির সর্বোচ্চ গতিবেগ সেটিং 5-10কিমি/ঘন্টা, এবং বন্দর গাড়ির সর্বোচ্চ গতিবেগ 36কিমি/ঘন্টা। এতে অবিচ্ছিন্ন গতিবিনিময় যন্ত্র সহ থাকে।
ব্যাটারির ধারণ ক্ষমতা: সাধারণত ব্যবহৃত হয় 50-1000AH (অ্যাম্পার-ঘন্টা), যা মোটরের শক্তি/চাকার ব্যাস/ঢাল উঠানো/সর্বোচ্চ গতিবেগ/স্থায়িত্বের সময় (খালি থেকে পূর্ণ ফিরে আসা/পূর্ণ লোড) এবং অন্যান্য তথ্য দিয়ে গণনা করা হয়। বর্তমানে সাধারণত 100টন এর AGV এর ব্যাটারির ধারণ ক্ষমতা 96V300AH, 4 ঘন্টার খালি এবং পূর্ণ লোডের জন্য।
ল্যাঙ্গ্যু শক্তি সিস্টেম: বিশুদ্ধ ইলেকট্রিক সিস্টেম, যাতে গাড়ির গ্রেড রক্ষণাবেক্ষণ মুক্ত লিথিয়াম আয়রন ফসফেট ব্যাটারি ব্যবহার করে শক্তি উৎপাদন করা হয়
ব্যাটারির পরিচালনা তাপমাত্রা: স্বাভাবিক মানদণ্ডে ব্যাটারির পরিচালনা তাপমাত্রা -20° থেকে 45° এবং চরম তাপমাত্রা -40° থেকে 65° (স্ব-উত্তপ্ত যন্ত্র বা এয়ার কন্ডিশনার সহ)। চার্জিং তাপমাত্রা 0 ডিগ্রি সেলসিয়াসের উপরে হওয়া উচিত।
চার্জিং পদ্ধতি: হাতে চার্জিং বা স্বয়ংক্রিয় চার্জিং (যখন AGV স্বয়ং শনাক্ত করে যে এটি সেট মান থেকে কম হয়েছে, তখন এটি স্বয়ংক্রিয়ভাবে চার্জিং যন্ত্রের দিকে যায় এবং স্বয়ংক্রিয়ভাবে চার্জিং করে), স্বয়ংক্রিয় চার্জিং অন্তর্ভুক্ত করে স্পর্শহীন বিদ্যুৎ সরবরাহ, পরীক্ষামূলক চার্জিং, এবং নিচের দিকে চার্জিং।
AGV নেভিগেশনের প্রধান পদ্ধতিগুলি হল:
1. চৌম্বক স্ট্রিপ নেভিগেশন
ইলেকট্রোম্যাগনেটিক গাইডেন্সের মতো, এটি রাস্তার উপরে চৌম্বক টেপ ব্যবহার করে যা মেটাল তার প্রতিস্থাপন করে এবং চৌম্বক ইন্ডাকশন সিগন্যাল দিয়ে গাইডেন্স সম্পন্ন করে। এটি বেশ বিকল্প প্রদান করে, পথ পরিবর্তন বা প্রসারিত করা সহজ, এবং চৌম্বক টেপ সহজে স্থাপন করা যায়, তবে এই গাইডেন্স পদ্ধতি পরিবেশের চারপাশের ধাতু উপাদান দ্বারা সহজে বাধাপ্রাপ্ত হয়, এবং যন্ত্রপাতি দ্বারা চৌম্বক টেপ সহজে ক্ষতিগ্রস্ত হতে পারে, ফলে গাইডেন্সের বিশ্বস্ততা বাইরের পরিবেশের উপর বেশ নির্ভরশীল হয়।
2. লেজার SLAM নেভিগেশন
লেজার গাইডেন্স হল AGV চলার পথের চারপাশে সুনির্দিষ্ট অবস্থানে লেজার রিফ্লেক্টর স্থাপন করা। AGV একটি লেজার স্ক্যানার দিয়ে লেজার বিম বিকিরণ করে এবং রিফ্লেক্টর থেকে প্রতিফলিত লেজার বিম সংগ্রহ করে তার বর্তমান অবস্থান এবং দিক নির্ধারণ করে, এবং AGV কে স্থায়ী ত্রিভুজ জ্যামিতি পরিচালনা দিয়ে গাইড করে। এই প্রযুক্তির বৃহত্তম সুবিধা হল AGV সুনির্দিষ্ট অবস্থান করতে পারে; মেঝেতে অন্য কোনো অবস্থান সুবিধা প্রয়োজন নেই; চলার পথ সুনির্দিষ্ট এবং বিভিন্ন সাইট পরিবেশের সাথে সামঞ্জস্যপূর্ণ হতে পারে। এটি বর্তমানে অনেক বিদেশী AGV উৎপাদকদের প্রিয় উন্নত গাইডেন্স পদ্ধতি; অসুবিধা হল নির্মাণ খরচ উচ্চ, পরিবেশের দাবি বেশ কঠিন (বাইরের আলো, মেঝের দাবি, দৃশ্যমানতা দাবি ইত্যাদি), এবং বাইরে ব্যবহারের জন্য উপযুক্ত নয় (বিশেষ করে বৃষ্টি, তুষার, এবং কুয়াশায় খুব সংবেদনশীল)।
3. GNSS-GPS/বেইডু নেভিগেশন।
মৌলিক প্যারামিটার
AGV প্রকার: পিছনে লোড তোলা
নির্ধারিত লোড KG: 12000 KG
যানবাহনের ওজন: 3000 KG
ড্রাইভ পদ্ধতি: ডিফারেনশিয়াল
চলার দিক: সোজা সামনে এবং পিছনে, বাম এবং ডান, স্থানে ঘোরা
নেভিগেশন পদ্ধতি: চৌম্বক স্ট্রিপ
শরীরের মাপ (দৈর্ঘ্য, প্রস্থ এবং উচ্চতা) mm: 3400x1200x440
চাসিসের ভূমি ক্লিয়ারেন্স mm: 35
ব্যবহারের দৃশ্য: অভ্যন্তরীণ
অবস্থান সুনিশ্চিততা mm: ±10mm
নেভিগেশন সুনিশ্চিততা mm: ±10mm
গতিবেগ খালি/পূর্ণ লোড: 0-15
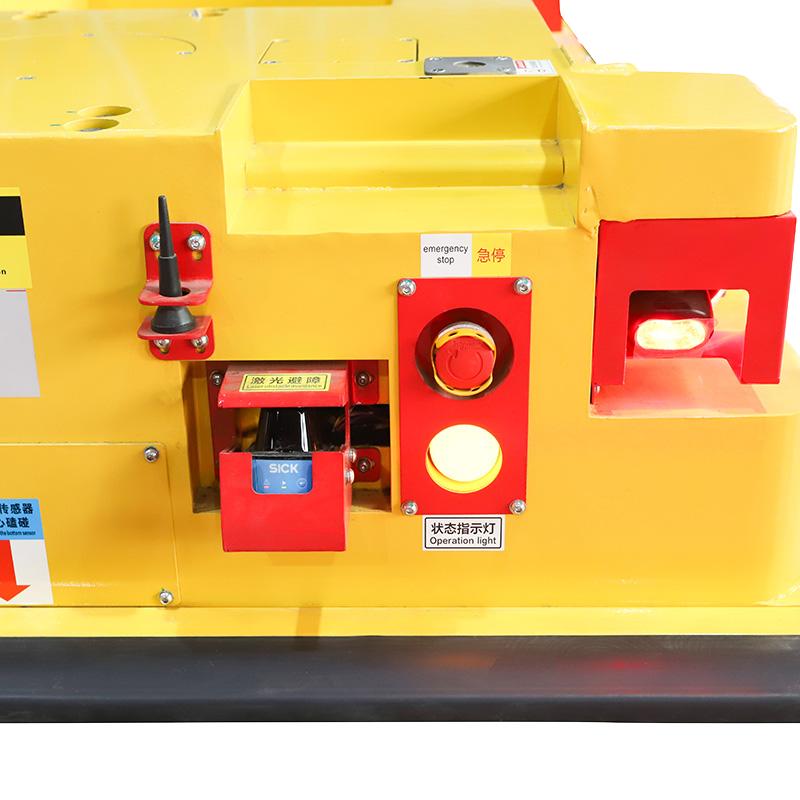
নিরাপত্তা প্রোটেকশন: লেজার বাধা এড়ানো সেন্সর + নিরাপত্তা এজ টাচ + শব্দ এবং আলোর অ্যালার্ট + জরুরি স্টপ বাটন

সম্পর্কিত পণ্য





সম্পর্কিত জ্ঞান
-
 মূল ট্রান্সফর্মারের দুর্ঘটনা এবং হালকা গ্যাস পরিচালনার সমস্যা১. দুর্ঘটনার রেকর্ড (১৯ মার্চ, ২০১৯)২০১৯ সালের ১৯ মার্চ ১৬:১৩ ঘটিকায়, পর্যবেক্ষণ ব্যাকগ্রাউন্ড থেকে জানা গেল যে, নম্বর ৩ মূল ট্রান্সফরমারে হালকা গ্যাস একশন রিপোর্ট করা হয়েছে। পাওয়ার ট্রান্সফরমার অপারেশনের কোড (DL/T572-2010) অনুযায়ী, অপারেশন এবং মেইনটেনেন্স (O&M) কর্মীরা নম্বর ৩ মূল ট্রান্সফরমারের সাইটের অবস্থা পর্যবেক্ষণ করেছেন।সাইটে সত্যাপন: নম্বর ৩ মূল ট্রান্সফরমারের WBH নন-ইলেকট্রিক্যাল প্রোটেকশন প্যানেল থেকে জানা গেল যে, ট্রান্সফরমার বডির ফেজ B-এ হালকা গ্যাস একশন রিপোর্ট করা হয়েছে এবং র02/05/2026
মূল ট্রান্সফর্মারের দুর্ঘটনা এবং হালকা গ্যাস পরিচালনার সমস্যা১. দুর্ঘটনার রেকর্ড (১৯ মার্চ, ২০১৯)২০১৯ সালের ১৯ মার্চ ১৬:১৩ ঘটিকায়, পর্যবেক্ষণ ব্যাকগ্রাউন্ড থেকে জানা গেল যে, নম্বর ৩ মূল ট্রান্সফরমারে হালকা গ্যাস একশন রিপোর্ট করা হয়েছে। পাওয়ার ট্রান্সফরমার অপারেশনের কোড (DL/T572-2010) অনুযায়ী, অপারেশন এবং মেইনটেনেন্স (O&M) কর্মীরা নম্বর ৩ মূল ট্রান্সফরমারের সাইটের অবস্থা পর্যবেক্ষণ করেছেন।সাইটে সত্যাপন: নম্বর ৩ মূল ট্রান্সফরমারের WBH নন-ইলেকট্রিক্যাল প্রোটেকশন প্যানেল থেকে জানা গেল যে, ট্রান্সফরমার বডির ফেজ B-এ হালকা গ্যাস একশন রিপোর্ট করা হয়েছে এবং র02/05/2026 -
 ১০ কেভি বিতরণ লাইনে একক-ফেজ গ্রাউন্ডিং ফল্ট এবং তার প্রশস্তিকরণএকক-ফেজ গ্রাউন্ড ফল্টের বৈশিষ্ট্য এবং সনাক্তকরণ ডিভাইস১. একক-ফেজ গ্রাউন্ড ফল্টের বৈশিষ্ট্যকেন্দ্রীয় অ্যালার্ম সংকেত:সতর্কতা ঘণ্টা বাজে এবং “[X] কেভি বাস সেকশন [Y]”-এ গ্রাউন্ড ফল্ট চিহ্নিতকারী নির্দেশক ল্যাম্প জ্বলে। পেটারসেন কয়েল (আর্ক সাপ্রেশন কয়েল) দ্বারা নিউট্রাল পয়েন্ট গ্রাউন্ড করা সিস্টেমে “পেটারসেন কয়েল অপারেটেড” নির্দেশকটিও জ্বলে।ইনসুলেশন মনিটরিং ভোল্টমিটারের নির্দেশনা:দোষযুক্ত ফেজের ভোল্টেজ হ্রাস পায় (অসম্পূর্ণ গ্রাউন্ডিংয়ের ক্ষেত্রে) অথবা শক্তিশালী গ্রাউন্ডিংয়ের ক্ষেত্রে শূন্যে01/30/2026
১০ কেভি বিতরণ লাইনে একক-ফেজ গ্রাউন্ডিং ফল্ট এবং তার প্রশস্তিকরণএকক-ফেজ গ্রাউন্ড ফল্টের বৈশিষ্ট্য এবং সনাক্তকরণ ডিভাইস১. একক-ফেজ গ্রাউন্ড ফল্টের বৈশিষ্ট্যকেন্দ্রীয় অ্যালার্ম সংকেত:সতর্কতা ঘণ্টা বাজে এবং “[X] কেভি বাস সেকশন [Y]”-এ গ্রাউন্ড ফল্ট চিহ্নিতকারী নির্দেশক ল্যাম্প জ্বলে। পেটারসেন কয়েল (আর্ক সাপ্রেশন কয়েল) দ্বারা নিউট্রাল পয়েন্ট গ্রাউন্ড করা সিস্টেমে “পেটারসেন কয়েল অপারেটেড” নির্দেশকটিও জ্বলে।ইনসুলেশন মনিটরিং ভোল্টমিটারের নির্দেশনা:দোষযুক্ত ফেজের ভোল্টেজ হ্রাস পায় (অসম্পূর্ণ গ্রাউন্ডিংয়ের ক্ষেত্রে) অথবা শক্তিশালী গ্রাউন্ডিংয়ের ক্ষেত্রে শূন্যে01/30/2026 -
 ১১০কেভি~২২০কেভি পাওয়ার গ্রিড ট্রান্সফরমারের নিরপেক্ষ বিন্দু মাটি করার পদ্ধতি১১০কেভি থেকে ২২০কেভি পর্যন্ত বিদ্যুৎ গ্রিড ট্রান্সফরমারের নিউট্রাল পয়েন্ট গ্রাউন্ডিং অপারেশন মোড ট্রান্সফরমার নিউট্রাল পয়েন্টের ইনসুলেশন টলারেন্স প্রয়োজনীয়তা পূরণ করতে হবে, এবং সাবস্টেশনের শূন্য-অর্ডার ইমপিডেন্স প্রায় অপরিবর্তিত রাখার চেষ্টা করতে হবে, যাতে সিস্টেমের যেকোন শর্ট-সার্কিট পয়েন্টে শূন্য-অর্ডার কম্প্রেহেন্সিভ ইমপিডেন্স পজিটিভ-অর্ডার কম্প্রেহেন্সিভ ইমপিডেন্সের তিনগুণের বেশি না হয়।নতুন নির্মাণ এবং প্রযুক্তিগত পুনর্গঠন প্রকল্পের ২২০কেভি এবং ১১০কেভি ট্রান্সফরমারের জন্য, তাদের নিউট্01/29/2026
১১০কেভি~২২০কেভি পাওয়ার গ্রিড ট্রান্সফরমারের নিরপেক্ষ বিন্দু মাটি করার পদ্ধতি১১০কেভি থেকে ২২০কেভি পর্যন্ত বিদ্যুৎ গ্রিড ট্রান্সফরমারের নিউট্রাল পয়েন্ট গ্রাউন্ডিং অপারেশন মোড ট্রান্সফরমার নিউট্রাল পয়েন্টের ইনসুলেশন টলারেন্স প্রয়োজনীয়তা পূরণ করতে হবে, এবং সাবস্টেশনের শূন্য-অর্ডার ইমপিডেন্স প্রায় অপরিবর্তিত রাখার চেষ্টা করতে হবে, যাতে সিস্টেমের যেকোন শর্ট-সার্কিট পয়েন্টে শূন্য-অর্ডার কম্প্রেহেন্সিভ ইমপিডেন্স পজিটিভ-অর্ডার কম্প্রেহেন্সিভ ইমপিডেন্সের তিনগুণের বেশি না হয়।নতুন নির্মাণ এবং প্রযুক্তিগত পুনর্গঠন প্রকল্পের ২২০কেভি এবং ১১০কেভি ট্রান্সফরমারের জন্য, তাদের নিউট্01/29/2026 -
 কেন সাবস্টেশনগুলি পাথর, কাঁচা পাথর, পাথরের ছোট টুকরো এবং চূর্ণিত পাথর ব্যবহার করে?কেন সাবস্টেশনগুলি পাথর, কঙ্কর, পেবল এবং চূর্ণীকৃত পাথর ব্যবহার করে?সাবস্টেশনে, পাওয়ার এবং ডিস্ট্রিবিউশন ট্রান্সফরমার, ট্রান্সমিশন লাইন, ভোল্টেজ ট্রান্সফরমার, কারেন্ট ট্রান্সফরমার এবং ডিসকানেক্ট সুইচ সহ সরঞ্জামগুলি গ্রাউন্ডিং প্রয়োজন। গ্রাউন্ডিংয়ের পাশাপাশি, আমরা এখন গভীরভাবে অনুসন্ধান করব কেন কঙ্কর এবং চূর্ণীকৃত পাথর সাবস্টেশনে সাধারণত ব্যবহৃত হয়। যদিও তারা সাধারণ দেখতে, এই পাথরগুলি গুরুত্বপূর্ণ নিরাপত্তা এবং ফাংশনাল ভূমিকা পালন করে।সাবস্টেশন গ্রাউন্ডিং ডিজাইনে—বিশেষ করে যখন বিভিন্ন গ্রাউন্ড01/29/2026
কেন সাবস্টেশনগুলি পাথর, কাঁচা পাথর, পাথরের ছোট টুকরো এবং চূর্ণিত পাথর ব্যবহার করে?কেন সাবস্টেশনগুলি পাথর, কঙ্কর, পেবল এবং চূর্ণীকৃত পাথর ব্যবহার করে?সাবস্টেশনে, পাওয়ার এবং ডিস্ট্রিবিউশন ট্রান্সফরমার, ট্রান্সমিশন লাইন, ভোল্টেজ ট্রান্সফরমার, কারেন্ট ট্রান্সফরমার এবং ডিসকানেক্ট সুইচ সহ সরঞ্জামগুলি গ্রাউন্ডিং প্রয়োজন। গ্রাউন্ডিংয়ের পাশাপাশি, আমরা এখন গভীরভাবে অনুসন্ধান করব কেন কঙ্কর এবং চূর্ণীকৃত পাথর সাবস্টেশনে সাধারণত ব্যবহৃত হয়। যদিও তারা সাধারণ দেখতে, এই পাথরগুলি গুরুত্বপূর্ণ নিরাপত্তা এবং ফাংশনাল ভূমিকা পালন করে।সাবস্টেশন গ্রাউন্ডিং ডিজাইনে—বিশেষ করে যখন বিভিন্ন গ্রাউন্ড01/29/2026 -
 ট্রান্সফরমারের কোর কেন শুধুমাত্র একটি বিন্দুতে গ্রাউন্ড করা হয়? বহুবিন্দু গ্রাউন্ডিং আরও নিরাপদ নয় কি?ট্রান্সফরমার কোরের মাটি কেন করতে হয়?অপারেশনের সময়, ট্রান্সফরমার কোর, এবং যেসব ধাতব স্ট্রাকচার, অংশ ও কম্পোনেন্ট কোর এবং ওয়াইন্ডিংগুলিকে স্থির রাখে, সবকিছু একটি শক্তিশালী বৈদ্যুতিক ক্ষেত্রে অবস্থিত। এই বৈদ্যুতিক ক্ষেত্রের প্রভাবে, তারা মাটির সাপেক্ষে একটি উচ্চ পটেনশিয়াল অর্জন করে। যদি কোরটি মাটি না করা হয়, তাহলে কোর এবং মাটি করা ক্ল্যাম্পিং স্ট্রাকচার এবং ট্যাঙ্কের মধ্যে একটি পটেনশিয়াল পার্থক্য থাকবে, যা ইন্টারমিটেন্ট ডিসচার্জ ঘটাতে পারে।এছাড়াও, অপারেশনের সময়, ওয়াইন্ডিংগুলির চারপাশে একটি01/29/2026
ট্রান্সফরমারের কোর কেন শুধুমাত্র একটি বিন্দুতে গ্রাউন্ড করা হয়? বহুবিন্দু গ্রাউন্ডিং আরও নিরাপদ নয় কি?ট্রান্সফরমার কোরের মাটি কেন করতে হয়?অপারেশনের সময়, ট্রান্সফরমার কোর, এবং যেসব ধাতব স্ট্রাকচার, অংশ ও কম্পোনেন্ট কোর এবং ওয়াইন্ডিংগুলিকে স্থির রাখে, সবকিছু একটি শক্তিশালী বৈদ্যুতিক ক্ষেত্রে অবস্থিত। এই বৈদ্যুতিক ক্ষেত্রের প্রভাবে, তারা মাটির সাপেক্ষে একটি উচ্চ পটেনশিয়াল অর্জন করে। যদি কোরটি মাটি না করা হয়, তাহলে কোর এবং মাটি করা ক্ল্যাম্পিং স্ট্রাকচার এবং ট্যাঙ্কের মধ্যে একটি পটেনশিয়াল পার্থক্য থাকবে, যা ইন্টারমিটেন্ট ডিসচার্জ ঘটাতে পারে।এছাড়াও, অপারেশনের সময়, ওয়াইন্ডিংগুলির চারপাশে একটি01/29/2026 -
 ট্রান্সফরমার নিউট্রাল গ্রাউন্ডিং বোঝাআই. নিউট্রাল পয়েন্ট কী?ট্রান্সফরমার এবং জেনারেটরে, নিউট্রাল পয়েন্ট হল উইন্ডিংয়ের একটি নির্দিষ্ট বিন্দু যেখানে এই বিন্দু এবং প্রতিটি বাহ্যিক টার্মিনালের মধ্যে পরম ভোল্টেজ সমান। নিচের চিত্রে, বিন্দুওনিউট্রাল পয়েন্টকে নির্দেশ করে।দ্বিতীয়. নিউট্রাল পয়েন্টকে কেন গ্রাউন্ড করা হয়?তিন-ফেজ এসি পাওয়ার সিস্টেমে নিউট্রাল পয়েন্ট এবং পৃথিবীর মধ্যে বৈদ্যুতিক সংযোগ পদ্ধতিকেনিউট্রাল গ্রাউন্ডিং পদ্ধতিবলা হয়। এই গ্রাউন্ডিং পদ্ধতি সরাসরি নিম্নলিখিতগুলির উপর প্রভাব ফেলে:বিদ্যুৎ জালের নিরাপত্তা, বিশ্বস্ততা01/29/2026
ট্রান্সফরমার নিউট্রাল গ্রাউন্ডিং বোঝাআই. নিউট্রাল পয়েন্ট কী?ট্রান্সফরমার এবং জেনারেটরে, নিউট্রাল পয়েন্ট হল উইন্ডিংয়ের একটি নির্দিষ্ট বিন্দু যেখানে এই বিন্দু এবং প্রতিটি বাহ্যিক টার্মিনালের মধ্যে পরম ভোল্টেজ সমান। নিচের চিত্রে, বিন্দুওনিউট্রাল পয়েন্টকে নির্দেশ করে।দ্বিতীয়. নিউট্রাল পয়েন্টকে কেন গ্রাউন্ড করা হয়?তিন-ফেজ এসি পাওয়ার সিস্টেমে নিউট্রাল পয়েন্ট এবং পৃথিবীর মধ্যে বৈদ্যুতিক সংযোগ পদ্ধতিকেনিউট্রাল গ্রাউন্ডিং পদ্ধতিবলা হয়। এই গ্রাউন্ডিং পদ্ধতি সরাসরি নিম্নলিখিতগুলির উপর প্রভাব ফেলে:বিদ্যুৎ জালের নিরাপত্তা, বিশ্বস্ততা01/29/2026
সম্পর্কিত সমাধানসমূহ
-
 প্রতিষ্ঠানগত বাতাস-সৌর হাইব্রিড শক্তি সমাধান IEE-Business দ্বারা দূরবর্তী দ্বীপের জন্যসারসংক্ষেপএই প্রস্তাবটি একটি অনুষঙ্গী শক্তি সমাধান উপস্থাপন করে যা প্রবাহী শক্তি, ফোটোভোলটাইক শক্তি উৎপাদন, পাম্পড হাইড্রো স্টোরেজ এবং সমুদ্র পানি পরিষ্কারণ প্রযুক্তি গুলির গভীরভাবে সংমিশ্রণ করে। এটি দূরবর্তী দ্বীপগুলির মূল চ্যালেঞ্জগুলির মধ্যে গ্রিড কভারেজের অসুবিধা, ডিজেল শক্তি উৎপাদনের উচ্চ খরচ, ঐতিহ্যগত ব্যাটারি স্টোরেজের সীমাবদ্ধতা এবং স্বচ্ছ পানির সম্পদের অভাব সিস্টেমের মাধ্যমে ঠিকমতো পরিচালনা করে। এই সমাধানটি "শক্তি সরবরাহ - শক্তি সঞ্চয় - পানি সরবরাহ" এর মধ্যে সহযোগিতা এবং আত্মনির্ভরশীলত10/17/2025
প্রতিষ্ঠানগত বাতাস-সৌর হাইব্রিড শক্তি সমাধান IEE-Business দ্বারা দূরবর্তী দ্বীপের জন্যসারসংক্ষেপএই প্রস্তাবটি একটি অনুষঙ্গী শক্তি সমাধান উপস্থাপন করে যা প্রবাহী শক্তি, ফোটোভোলটাইক শক্তি উৎপাদন, পাম্পড হাইড্রো স্টোরেজ এবং সমুদ্র পানি পরিষ্কারণ প্রযুক্তি গুলির গভীরভাবে সংমিশ্রণ করে। এটি দূরবর্তী দ্বীপগুলির মূল চ্যালেঞ্জগুলির মধ্যে গ্রিড কভারেজের অসুবিধা, ডিজেল শক্তি উৎপাদনের উচ্চ খরচ, ঐতিহ্যগত ব্যাটারি স্টোরেজের সীমাবদ্ধতা এবং স্বচ্ছ পানির সম্পদের অভাব সিস্টেমের মাধ্যমে ঠিকমতো পরিচালনা করে। এই সমাধানটি "শক্তি সরবরাহ - শক্তি সঞ্চয় - পানি সরবরাহ" এর মধ্যে সহযোগিতা এবং আত্মনির্ভরশীলত10/17/2025 -
 একটি বুদ্ধিমান বায়ু-সৌর হাইব্রিড সিস্টেম ফাজি-পিআইডি নিয়ন্ত্রণ সহ উন্নত ব্যাটারি পরিচালনা এবং এমপিপিটির জন্যসারাংশএই প্রস্তাবে একটি উন্নত নিয়ন্ত্রণ প্রযুক্তি ভিত্তিক বাতাস-সৌর হাইব্রিড বিদ্যুৎ উৎপাদন ব্যবস্থা উপস্থাপন করা হয়েছে, যার লক্ষ্য হল দূরবর্তী অঞ্চল এবং বিশেষ প্রয়োগ দৃশ্যে বিদ্যুৎ প্রয়োজনের কার্যকর ও অর্থনৈতিক সমাধান প্রদান করা। ব্যবস্থাটির মূল অংশ হল ATmega16 মাইক্রোপ্রসেসর কেন্দ্রিক একটি বুদ্ধিমান নিয়ন্ত্রণ ব্যবস্থা। এই ব্যবস্থা বাতাস এবং সৌর শক্তির জন্য সর্বোচ্চ শক্তি বিন্দু ট্র্যাকিং (MPPT) পরিচালনা করে এবং PID এবং ফাজি নিয়ন্ত্রণের সম্মিলিত অপটিমাইজড অ্যালগরিদম ব্যবহার করে গুরুত্বপূর10/17/2025
একটি বুদ্ধিমান বায়ু-সৌর হাইব্রিড সিস্টেম ফাজি-পিআইডি নিয়ন্ত্রণ সহ উন্নত ব্যাটারি পরিচালনা এবং এমপিপিটির জন্যসারাংশএই প্রস্তাবে একটি উন্নত নিয়ন্ত্রণ প্রযুক্তি ভিত্তিক বাতাস-সৌর হাইব্রিড বিদ্যুৎ উৎপাদন ব্যবস্থা উপস্থাপন করা হয়েছে, যার লক্ষ্য হল দূরবর্তী অঞ্চল এবং বিশেষ প্রয়োগ দৃশ্যে বিদ্যুৎ প্রয়োজনের কার্যকর ও অর্থনৈতিক সমাধান প্রদান করা। ব্যবস্থাটির মূল অংশ হল ATmega16 মাইক্রোপ্রসেসর কেন্দ্রিক একটি বুদ্ধিমান নিয়ন্ত্রণ ব্যবস্থা। এই ব্যবস্থা বাতাস এবং সৌর শক্তির জন্য সর্বোচ্চ শক্তি বিন্দু ট্র্যাকিং (MPPT) পরিচালনা করে এবং PID এবং ফাজি নিয়ন্ত্রণের সম্মিলিত অপটিমাইজড অ্যালগরিদম ব্যবহার করে গুরুত্বপূর10/17/2025 -
 খরচ কমানো বাতাস-সূর্য হাইব্রিড সমাধান: বাক-বুস্ট কনভার্টার এবং স্মার্ট চার্জিং সিস্টেম খরচ কমায়সারাংশএই সমাধানটি একটি নতুন উচ্চ-দক্ষতার বাতাস-সৌর মিশ্র বিদ্যুৎ উৎপাদন পদ্ধতি প্রস্তাব করে। বর্তমান প্রযুক্তির মূল অভাব, যেমন কম শক্তি ব্যবহার, ছোট ব্যাটারি জীবনকাল এবং খারাপ সিস্টেম স্থিতিশীলতা - এই সমস্যাগুলি ঠিক করার জন্য, এই সিস্টেমটি পূর্ণ ডিজিটাল নিয়ন্ত্রিত বাক-বুস্ট DC/DC কনভার্টার, ইন্টারলিভড সমান্তরাল প্রযুক্তি এবং একটি বুদ্ধিমান তিন-ধাপের চার্জিং অ্যালগরিদম ব্যবহার করে। এটি বিস্তৃত বাতাসের গতি এবং সৌর আলোর পরিমাণের জন্য সর্বোচ্চ শক্তি বিন্দু ট্র্যাকিং (MPPT) সম্ভব করে, শক্তি ধারণ দক10/17/2025
খরচ কমানো বাতাস-সূর্য হাইব্রিড সমাধান: বাক-বুস্ট কনভার্টার এবং স্মার্ট চার্জিং সিস্টেম খরচ কমায়সারাংশএই সমাধানটি একটি নতুন উচ্চ-দক্ষতার বাতাস-সৌর মিশ্র বিদ্যুৎ উৎপাদন পদ্ধতি প্রস্তাব করে। বর্তমান প্রযুক্তির মূল অভাব, যেমন কম শক্তি ব্যবহার, ছোট ব্যাটারি জীবনকাল এবং খারাপ সিস্টেম স্থিতিশীলতা - এই সমস্যাগুলি ঠিক করার জন্য, এই সিস্টেমটি পূর্ণ ডিজিটাল নিয়ন্ত্রিত বাক-বুস্ট DC/DC কনভার্টার, ইন্টারলিভড সমান্তরাল প্রযুক্তি এবং একটি বুদ্ধিমান তিন-ধাপের চার্জিং অ্যালগরিদম ব্যবহার করে। এটি বিস্তৃত বাতাসের গতি এবং সৌর আলোর পরিমাণের জন্য সর্বোচ্চ শক্তি বিন্দু ট্র্যাকিং (MPPT) সম্ভব করে, শক্তি ধারণ দক10/17/2025






