12tonnin raskas AGV



Avainattribuutit
| Merkki | Wone Store |
| Mallin numero | 12tonnin raskas AGV |
| Nominalpaino | 12 ton |
| Sarja | LY-AK-12T |
Toimittajan tuotekuvaukset
AGV:n jousitusmenetelmä: kehrä, hydraulinen
AGV:n ajaminen nopeus: Sisätilojen AGV:n nopeus on 0-60m/min. Jos nopeus on suurempi, se riippuu oikeasta tilanteesta. Kuitenkin yleisten tuotantoyritysten paikallisen ympäristön, henkilöstön turvallisuuden ja AGV:n työskentelyajan kuormituksen huomioon ottaen, on suositeltavaa, että nopeus ei ylitä 30m/min. (Muuntaja-alan ultraohuille vakioajoneuvoille 20m/min) Ulkoisten ajoneuvojen maksiminopeuden asetus on 5-10Km/H, ja satamajoneuvojen maksiminopeus on 36Km/H. Varustettu jatkuvasti vaihtelevalla vaihtelaite.
Akkukapasiteetti: Yleisesti käytettyjä ovat 50-1000AH (ampere-tunti), lasketaan perustuen moottorin teho/renkaan halkaisija koon/puskurin nousu/maksiminopeus/kestävyysaika (tyhjästä täyteen paluuta/täysi kuorma). Nykyään yleisesti käytetty 100 tonnin AGV:n akkukapasiteetti on 96V300AH 4 tunnin tyhjästä täyteen paluuta ja täysi kuorma.
Langyu voimasysteemi: puhtaan sähköisen systeemin, jossa käytetään autokilpailutason ylläpitovapaita rautafosfattiakkuja voiman syöttämiseen
Akun toimintalämpötila: normaalit standardit suosittelevat akun toimintalämpötilaksi -20° to 45° ja äärimmäiset lämpötilat -40° to 65° (varustettu itselämmityslaite tai ilmastointi). Latauslämpötila on yli nollan astetta.
Lataustapa: manuaalinen lataus tai automaattinen lataus (kun AGV havaitsee automaattisesti, että se on alhaisempi kuin asetettu arvo, se kulkee automaattisesti latauslaitteeseen automaattiseen lataukseen), automaattinen lataus sisältää kosketusvapaa sähköntarjoamista, testilatausta ja pohjalatausta.
AGV:n navigointimenetelmät sisältävät pääasiassa:
1. Magnetiteipinavigointi
Samanlainen kuin sähkömagneettinen ohjaus, se käyttää tielle kiinnitettyä magneettiteippiä maan alle piilotettujen metallijohdotusten sijaan, ja toteuttaa ohjaamisen magneettisen induktion signaalien avulla. Sillä on parempi joustavuus, polkua on helpompaa muuttaa tai laajentaa, ja magneettiteippi on yksinkertainen ja helppo asentaa, mutta tällä ohjausmenetelmällä on helposti häiriintyvä metallimateriaali silmukan ympärillä, ja magneettiteippi on helposti vaurioituvissa koneilla, joten ohjausluotettavuus on suuresti vaikutettu ulkopuolisista tekijöistä.
2. Laser SLAM-navigointi
Laserohjaus on asentaa tarkasti sijoitettuja laserheijastinta AGV:n ajopolulle ympärillä. AGV heittää laserkeiliä laserkannella ja kerää heijastimet heijastamia laserkeiliä määrittää sen nykyisen sijainnin ja suunnan, ja ohjaa AGV:tä jatkuvan kolmiometrian avulla. Tämän teknologian suurin etu on, että AGV voidaan sijoittaa tarkasti; ei tarvita muita sijaintilaitteita maahan; ajopolku voi olla joustava ja sopeutettavissa moniin paikan päälle oleviin ympäristöihin. Se on nykyisin monien ulkomaiden AGV-valmistajien suosima edistynyt ohjausmenetelmä; haittapuoli on, että valmistuskustannukset ovat korkeat, ympäristövaatimukset ovat suhteellisen ankarat (ulkopuolinen valo, maavarausvaatimukset, näkyvyysvaatimukset jne.), eikä se ole sovellettavissa ulkoille (erityisesti altis sadalle, lumelle ja sumulle).
3. GNSS-GPS/Pohjoisnavan navigointi.
Peruspärmeterit
AGV-laji: Takaluontainen nosto
Nimitetty kuorma KG: 12000 KG
Ajoneuvon massa: 3000 KG
Ajomuoto: Erova
Liikenne suunta: Suora eteen- ja taaksepäin, vasemmalle ja oikealle, paikallinen kierto
Navigointimenetelmä: Magnetiteippi
Runko mitat (pituus, leveys ja korkeus) mm: 3400x1200x440
Alusrunkon maahdempaus mm: 35
Käyttötarkoitus: Sisätila
Sijainnin tarkkuus mm: ±10mm
Navigointitarkkuus mm: ±10mm
Ajono nopeus tyhjä/täysi kuorma: 0-15
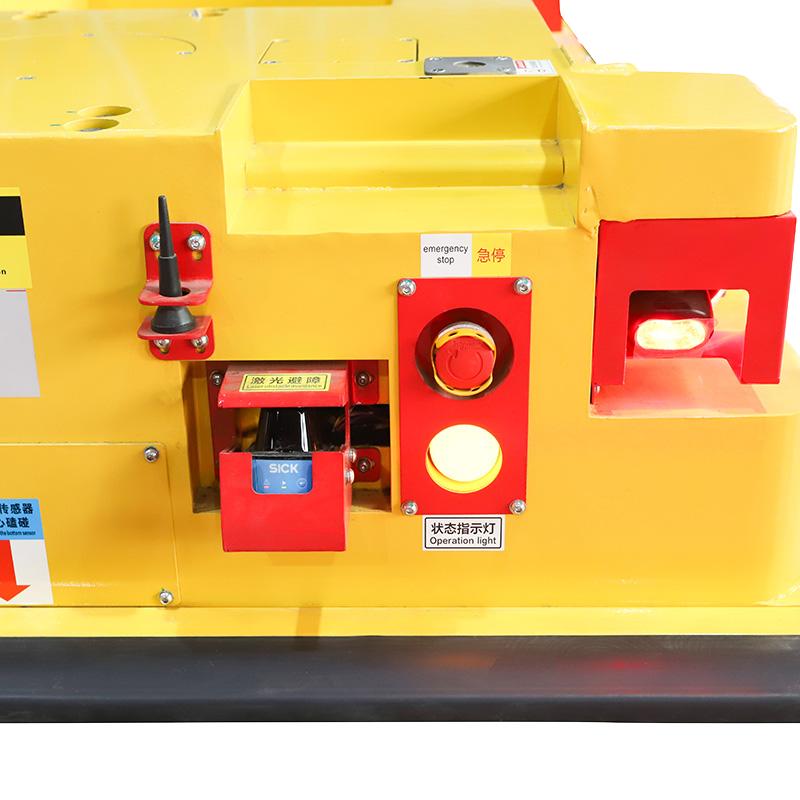
Turvallisuussuoja: Laseresteensensori + turvareuna kosketus + äänivalo hälytys + hätäpysäytysnappi

Liittyvät tuotteet





Aiheeseen liittyvät tiedot
-
 Päämuuntajan onnettomuudet ja kevyen kaasun toimintongelmat1. Onnettomuuden kirjaus (19. maaliskuuta 2019)19. maaliskuuta 2019 kello 16:13 valvontajärjestelmä ilmoitti kevyen kaasun toiminnasta kolmannessa päämuuntimessa. Voiman muuntimien käyttöohjeiden (DL/T572-2010) mukaisesti huolto- ja ylläpitohenkilöstö tarkisti kolmannen päämuuntimen paikan päällä olevan tilan.Paikan päällä vahvistettiin: Kolmannen päämuuntimen WBH ei-sähköinen suojalaatikko ilmoitti B-faasin kevyestä kaasutoiminnasta muuntimen runkossa, ja nollaus oli tehottomaa. Huolto- ja yllä02/05/2026
Päämuuntajan onnettomuudet ja kevyen kaasun toimintongelmat1. Onnettomuuden kirjaus (19. maaliskuuta 2019)19. maaliskuuta 2019 kello 16:13 valvontajärjestelmä ilmoitti kevyen kaasun toiminnasta kolmannessa päämuuntimessa. Voiman muuntimien käyttöohjeiden (DL/T572-2010) mukaisesti huolto- ja ylläpitohenkilöstö tarkisti kolmannen päämuuntimen paikan päällä olevan tilan.Paikan päällä vahvistettiin: Kolmannen päämuuntimen WBH ei-sähköinen suojalaatikko ilmoitti B-faasin kevyestä kaasutoiminnasta muuntimen runkossa, ja nollaus oli tehottomaa. Huolto- ja yllä02/05/2026 -
 10kV-jakojohtojen yksivaiheinen maajäristys ja sen korjaaminenYksivaiheisten maasulkuja koskevat ominaisuudet ja havaintolaitteet1. Yksivaiheisten maasulkuja koskevat ominaisuudetKeskivaroitusmerkit:Varoituskello soi ja merkkivalo ”Maasulku [X] kV:n väyläosassa [Y]” syttyy. Petersen-kellassa (kaaritukikela) neutraalipisteen maadoitettavissa olevissa järjestelmissä myös ”Petersen-kela käytössä” -merkkivalo syttyy.Eristysvalvontajännitemittarin näyttämät:Virheellisen vaiheen jännite laskee (epätäydellisessä maasulussa) tai putoaa nollaan (kiinteässä maasulus01/30/2026
10kV-jakojohtojen yksivaiheinen maajäristys ja sen korjaaminenYksivaiheisten maasulkuja koskevat ominaisuudet ja havaintolaitteet1. Yksivaiheisten maasulkuja koskevat ominaisuudetKeskivaroitusmerkit:Varoituskello soi ja merkkivalo ”Maasulku [X] kV:n väyläosassa [Y]” syttyy. Petersen-kellassa (kaaritukikela) neutraalipisteen maadoitettavissa olevissa järjestelmissä myös ”Petersen-kela käytössä” -merkkivalo syttyy.Eristysvalvontajännitemittarin näyttämät:Virheellisen vaiheen jännite laskee (epätäydellisessä maasulussa) tai putoaa nollaan (kiinteässä maasulus01/30/2026 -
 110kV~220kV sähköverkkomuuntajien neutraalipisteen maan kytkentätoimintatapa110kV~220kV-sähköverkon muuntimien neutraalipisteen maanjäristyksen asettelun on vastattava muuntimen neutraalipisteen eristysvaatimuksia ja pyrittävä pitämään sähköasemien nollajärjestysimpedanssi lähes samana, varmistaen, että järjestelmän minkä tahansa lyhytuspaikan nollajärjestysyhdistetty impedanssi ei ylitä kolme kertaa positiivijärjestysyhdistetty impedanssi.Uudisrakentamis- ja teknologianuorten hankkeiden 220kV:n ja 110kV:n muuntimien neutraalipisteen maanjäristyksen asettelun on noudate01/29/2026
110kV~220kV sähköverkkomuuntajien neutraalipisteen maan kytkentätoimintatapa110kV~220kV-sähköverkon muuntimien neutraalipisteen maanjäristyksen asettelun on vastattava muuntimen neutraalipisteen eristysvaatimuksia ja pyrittävä pitämään sähköasemien nollajärjestysimpedanssi lähes samana, varmistaen, että järjestelmän minkä tahansa lyhytuspaikan nollajärjestysyhdistetty impedanssi ei ylitä kolme kertaa positiivijärjestysyhdistetty impedanssi.Uudisrakentamis- ja teknologianuorten hankkeiden 220kV:n ja 110kV:n muuntimien neutraalipisteen maanjäristyksen asettelun on noudate01/29/2026 -
 Miksi alijamia käyttää kiviä gravaa raakakiveä ja murskausta?Miksi alijohdantoasemat käyttävät kiviä, sora, pelloja ja murskausta?Alijohdantoasemissa laitteet, kuten voima- ja jakelumuuntimet, siirtolinjat, jännite- ja virtamuuntimet sekä erottimet, vaativat maanpäähdyksen. Maanpäähdyksen lisäksi tutkimme nyt syvällisemmin, miksi sora ja murskaus ovat yleisiä alijohdantoasemissa. Vaikka ne näyttävät tavallisilta, nämä kivet pelaavat kriittisen turvallisuuden ja toiminnallisen roolin.Alijohdantoaseman maanpäähdyssuunnittelussa – erityisesti kun käytetään u01/29/2026
Miksi alijamia käyttää kiviä gravaa raakakiveä ja murskausta?Miksi alijohdantoasemat käyttävät kiviä, sora, pelloja ja murskausta?Alijohdantoasemissa laitteet, kuten voima- ja jakelumuuntimet, siirtolinjat, jännite- ja virtamuuntimet sekä erottimet, vaativat maanpäähdyksen. Maanpäähdyksen lisäksi tutkimme nyt syvällisemmin, miksi sora ja murskaus ovat yleisiä alijohdantoasemissa. Vaikka ne näyttävät tavallisilta, nämä kivet pelaavat kriittisen turvallisuuden ja toiminnallisen roolin.Alijohdantoaseman maanpäähdyssuunnittelussa – erityisesti kun käytetään u01/29/2026 -
 Miksi transformatorin ydin täytyy maata vain yhdellä pisteellä Eikö usean pisteen maointi ole luotettavampaaMiksi muuntajan ydin on kytkettävä maan?Toiminnassa muuntajan ydin, kuten myös metallirakenteet, osat ja komponentit, jotka kiinnittävät ydintä ja vääntöjä, sijaitsevat voimakkaassa sähkökentässä. Tämän sähkökentän vaikutuksesta ne saavat suhteessa maahan melko korkean potentiaalin. Jos ydin ei ole kytketty maan, ydin ja maanjäristyksen puristusmekanismi sekä tankki välille syntyisi potentiaaliero, mikä voi johtaa väliaikaiseen sähköpurkuun.Lisäksi toiminnassa vääntöjen ympärille muodostuu voima01/29/2026
Miksi transformatorin ydin täytyy maata vain yhdellä pisteellä Eikö usean pisteen maointi ole luotettavampaaMiksi muuntajan ydin on kytkettävä maan?Toiminnassa muuntajan ydin, kuten myös metallirakenteet, osat ja komponentit, jotka kiinnittävät ydintä ja vääntöjä, sijaitsevat voimakkaassa sähkökentässä. Tämän sähkökentän vaikutuksesta ne saavat suhteessa maahan melko korkean potentiaalin. Jos ydin ei ole kytketty maan, ydin ja maanjäristyksen puristusmekanismi sekä tankki välille syntyisi potentiaaliero, mikä voi johtaa väliaikaiseen sähköpurkuun.Lisäksi toiminnassa vääntöjen ympärille muodostuu voima01/29/2026 -
 Trafon neutraalijohdon maanjäykistysI. Mikä on neutraalipiste?Muuntimissa ja generaattoreissa neutraalipiste on erityinen piste kytkentässä, jossa tämän pisteen ja jokaisen ulkopuolisen terminaalin välillä oleva absoluuttinen jännite on yhtä suuri. Alla olevassa kaaviossa pisteOedustaa neutraalipistettä.II. Miksi neutraalipistettä pitää maata?Sähköinen yhteysmenetelmä neutraalipisteen ja maan välillä kolmifasuisessa vaihtosähköjärjestelmässä kutsutaanneutraalimaamismenetelmäksi. Tämä maamismenetelmä vaikuttaa suoraan:Sähköverkon t01/29/2026
Trafon neutraalijohdon maanjäykistysI. Mikä on neutraalipiste?Muuntimissa ja generaattoreissa neutraalipiste on erityinen piste kytkentässä, jossa tämän pisteen ja jokaisen ulkopuolisen terminaalin välillä oleva absoluuttinen jännite on yhtä suuri. Alla olevassa kaaviossa pisteOedustaa neutraalipistettä.II. Miksi neutraalipistettä pitää maata?Sähköinen yhteysmenetelmä neutraalipisteen ja maan välillä kolmifasuisessa vaihtosähköjärjestelmässä kutsutaanneutraalimaamismenetelmäksi. Tämä maamismenetelmä vaikuttaa suoraan:Sähköverkon t01/29/2026
Aiheutuvat ratkaisut
-
 Integroitu tuuli-aurinkoyhdistelmävoimalaratkaisu kaukaisille saarilleYhteenvetoTämä ehdotus esittelee innovatiivisen yhdennetyn energiaratkaisun, joka yhdistää syvällisesti tuulivoiman, aurinkosähkön, pumppuvarastointi- ja meriveden desalinoinnin teknologiat. Se pyrkii järjestelmällisesti ratkaisemaan syrjäsaarten kohtaamat ytimekkäät haasteet, kuten hankala sähköverkon kattavuus, dieselvoimaloiden korkeat kustannukset, perinteisten akkujen rajoitukset ja makean veden resurssien puutteellisuus. Ratkaisu saavuttaa synergian ja itsenäisyyden "sähköntarjoamisessa -10/17/2025
Integroitu tuuli-aurinkoyhdistelmävoimalaratkaisu kaukaisille saarilleYhteenvetoTämä ehdotus esittelee innovatiivisen yhdennetyn energiaratkaisun, joka yhdistää syvällisesti tuulivoiman, aurinkosähkön, pumppuvarastointi- ja meriveden desalinoinnin teknologiat. Se pyrkii järjestelmällisesti ratkaisemaan syrjäsaarten kohtaamat ytimekkäät haasteet, kuten hankala sähköverkon kattavuus, dieselvoimaloiden korkeat kustannukset, perinteisten akkujen rajoitukset ja makean veden resurssien puutteellisuus. Ratkaisu saavuttaa synergian ja itsenäisyyden "sähköntarjoamisessa -10/17/2025 -
 Älykäs tuuli-aurinkohybridijärjestelmä fuzzy-PID-ohjauksella parannettuun akkujen hallintaan ja MPP-hakuunYhteenvetoTämä ehdotus esittelee tuulivoima- ja aurinkoenergian yhdistelmäjärjestelmän, joka perustuu edistyneeseen ohjausteknologiaan ja jonka tavoitteena on tehokas ja taloudellisesti kannattava vastaus kaukana sijaitsevien alueiden ja erityisten sovellustilanteiden sähkötarpeisiin. Järjestelmän ydin on älykäs ohjausjärjestelmä, joka perustuu ATmega16-mikroprosessoriin. Tämä järjestelmä suorittaa Maksimivalon pisteen seuranta (MPPT) sekä tuulivoiman että aurinkoenergian osalta ja käyttää optim10/17/2025
Älykäs tuuli-aurinkohybridijärjestelmä fuzzy-PID-ohjauksella parannettuun akkujen hallintaan ja MPP-hakuunYhteenvetoTämä ehdotus esittelee tuulivoima- ja aurinkoenergian yhdistelmäjärjestelmän, joka perustuu edistyneeseen ohjausteknologiaan ja jonka tavoitteena on tehokas ja taloudellisesti kannattava vastaus kaukana sijaitsevien alueiden ja erityisten sovellustilanteiden sähkötarpeisiin. Järjestelmän ydin on älykäs ohjausjärjestelmä, joka perustuu ATmega16-mikroprosessoriin. Tämä järjestelmä suorittaa Maksimivalon pisteen seuranta (MPPT) sekä tuulivoiman että aurinkoenergian osalta ja käyttää optim10/17/2025 -
 Kustannustehokas tuuli-aurinkohybridi ratkaisu: Buck-Boost-muunnin ja älykäs lataus vähentävät järjestelmän kustannuksiaYhteenvetoTämä ratkaisu ehdottaa innovatiivista tehokasta tuuli-aurinkohybridienergiantuotantojärjestelmää. Ratkaistakseen nykyisten teknologioiden ytimekkäitä heikkouksia, kuten alhaisen energian hyödyntämisen, lyhyen akun käyttöikän ja huonon järjestelmän vakauden, järjestelmä käyttää täysin digitaalisesti ohjattuja buck-boost DC/DC-muuntimia, ristiriitoittain yhdensuuntaista tekniikkaa ja älykästä kolmivaiheista latausalgoritmia. Tämä mahdollistaa Maksimaalisen Tehon Pisteen Seurannan (MPPT)10/17/2025
Kustannustehokas tuuli-aurinkohybridi ratkaisu: Buck-Boost-muunnin ja älykäs lataus vähentävät järjestelmän kustannuksiaYhteenvetoTämä ratkaisu ehdottaa innovatiivista tehokasta tuuli-aurinkohybridienergiantuotantojärjestelmää. Ratkaistakseen nykyisten teknologioiden ytimekkäitä heikkouksia, kuten alhaisen energian hyödyntämisen, lyhyen akun käyttöikän ja huonon järjestelmän vakauden, järjestelmä käyttää täysin digitaalisesti ohjattuja buck-boost DC/DC-muuntimia, ristiriitoittain yhdensuuntaista tekniikkaa ja älykästä kolmivaiheista latausalgoritmia. Tämä mahdollistaa Maksimaalisen Tehon Pisteen Seurannan (MPPT)10/17/2025






