


| Zīme | Wone Store |
| Modela numurs | 12 tonu smagais būvniecības AGV |
| Nomērātais slodze | 12 ton |
| Sērija | LY-AK-12T |
AGV slodināšanas metode: sprīdze, hidraulika
AGV braukšanas ātrums: Iekšējā AGV ātrums ir 0-60m/min. Ja ātrums ir augstāks, tas atkarīgs no faktiskās situācijas. Tomēr, ņemot vērā vispārējo ražošanas uzņēmumu vietu apstākļus, darbinieku drošību un AGV darbības laikā nosūtāma svara apjomu, ieteicams, ka ātrums nevajadzētu pārsniegt 30m/min. (transformatoru rūpniecībā 20m/min ultraplakiem standarta automobiļiem) Ārējo transportlīdzekļu maksimālais ātruma iestatījums ir 5-10Km/H, osta transportlīdzekļu maksimālais ātrums ir 36Km/H. Aprīkots ar bezstarpnieka pārneses ierīci.
Akkumulatora kapacitāte: Bieži izmantotie aptver diapazonu no 50-1000AH (amperstundas), kas aprēķināts, balstoties uz dzinēja jaudu/ratlīnijas diametru/klātbūtni kalnu iešanai/maksimālo ātrumu/izturības laiku (tukšs līdz pilnīgai atgriešanai/pilnīga kravu veidošana). Pašlaik bieži izmantotajam 100 tonnu AGV akkumulatora kapacitāte ir 96V300AH 4 stundas tukšam un pilnīgai kravu veidošanai.
Langyu enerģijas sistēma: gudri elektroenerģijas sistēmas, izmantojot automašīnas klases bezūzglabas lietiķa fosfāta baterijas enerģijas izvadei
Baterijas darbības temperatūra: normālie standarti ieteica bateriju darbības temperatūras -20° līdz 45° un ekstrēmu temperatūras -40° līdz 65° (aprīkots ar savstarpēju sildīšanas ierīci vai kondicionieru). Uzlādes temperatūra ir virs 0 grādiem.
Uzlādes metode: manuāla uzlāde vai automātiska uzlāde (kad AGV automātiski noteica, ka tā ir zemāka par iestatīto vērtību, tā automātiski pārvietojas uz uzlādes ierīci, lai veiktu automātisko uzlādi), automātiskā uzlāde ietver bezkontaktu enerģijas piegādi, testa uzlādi un apakšējo uzlādi.
AGV navigācijas metodes galvenokārt ietver:
1. Magnētiskā svītras navigācija
Līdzīgi elektromagnētiskajai vadībai, tā izmanto magnētiskas svītras ceļa virsū, lai aizstātu metāllīnijas zemes zem, un realizē vadību caur magnētiskajiem indukcijas signāliem. Tā ir labāk pielāgojama, vieglāk maināma vai paplašināma maršruta, un magnētiskās svītras ir vienkāršas un viegli uzkārtotas, bet šī vadības metode viegli tiek traucēta apkārt esošajiem metāla materiāliem, un magnētiskās svītras viegli tiek bojātas mašīnām, tāpēc vadības uzticamība ļoti ir atkarīga no ārējiem apstākļiem.
2. Lāsera SLAM navigācija
Lāsera vadība nozīmē precīzi novietotos lāsera reflektorus AGV braukšanas maršrutā apkārt. AGV izsauc lāsera starus caur lāsera skeneru un apkopo lāsera starus, ko reflektori atstaro, lai noteiktu to pašreizējo pozīciju un virzienā, un vadītu AGV caur nepārtrauktiem trijstūra ģeometriskajiem aprēķiniem. Šīs tehnoloģijas lielākā priekšrocība ir, ka AGV var tikt precīzi pozicionēts; nav nepieciešamas citas pozicionēšanas ierīces uz zemes; braukšanas maršruts var būt elastīgs un pielāgojams dažādiem vietējiem apstākļiem. Tas ir pašlaik progresīvākā vadības metode, ko daudzi ārvalstu AGV ražotāji izvēlas; trūkums ir, ka ražošanas izmaksas ir augstas, vides prasības ir salīdzinoši smagas (ārējais gaismas apgaismojums, zemes prasības, redzamības prasības utt.), un tā nav piemērota ārpusē (īpaši nespējīga pret lietus, snigu un miglām).
3. GNSS-GPS/Beidou navigācija.
Pamata parametri
AGV tips: Atpakaļslodināšanas paceltājs
Nominalais slodinājuma KG: 12000 KG
Automobilis masas: 3000 KG
Pārvietošanās režīms: Diferenciālis
Kustības virzienā: Taisnā priekšā un aizmugurē, pa kreisi un pa labi, rotācija vietas
Navigācijas metode: Magnētiskā svītra
Virsbūves izmēri (garums, platums un augstums) mm: 3400x1200x440
Apakšbūves attālums no zemes mm: 35
Lietošanas scenārijs: Iekšējs
Pozicionēšanas precizitāte mm: ±10mm
Navigācijas precizitāte mm: ±10mm
Braukšanas ātrums tukšs/pilns slodinājums: 0-15
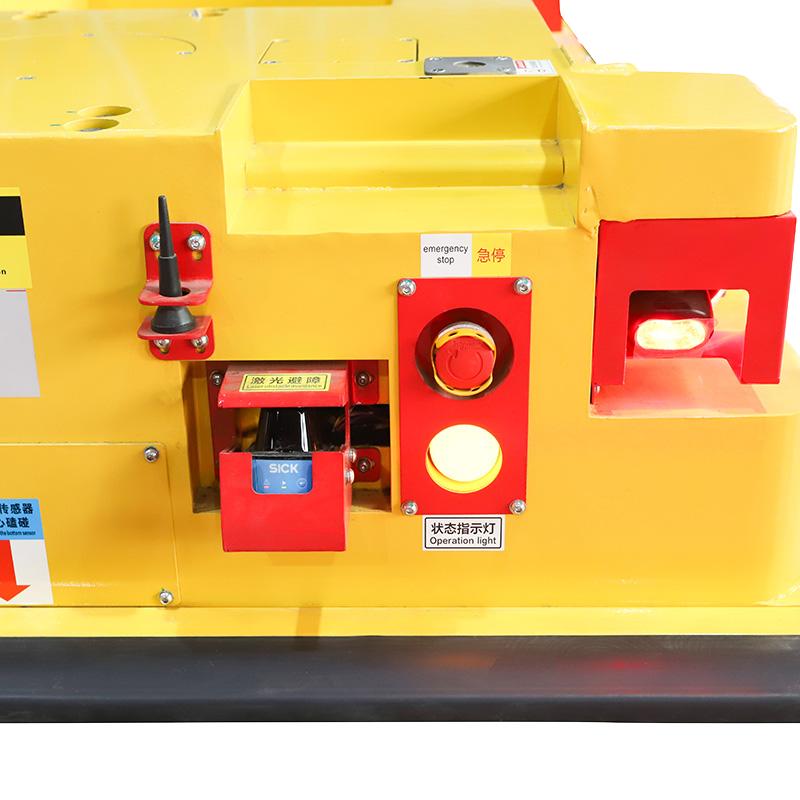
Drošības aizsardzība: Lāsera šķēršņu izvairīšanās sensors + drošības malas pieskars + skaņas un gaismas brīdinājums + ārkārtas apstāšanas pogas


















