12 टन हैवी-ड्यूटी AGV



महत्वपूर्ण विशेषताएं
| ब्रांड | Wone Store |
| मॉडल नंबर | 12 टन हैवी-ड्यूटी AGV |
| निर्धारित लोड | 12 ton |
| श्रृंखला | LY-AK-12T |
सप्लायर द्वारा प्रदान की गई उत्पाद विवरण
AGV सस्पेंशन विधि: स्प्रिंग, हाइड्रोलिक
AGV चालन गति: आंतरिक AGV की गति 0-60 मीटर/मिनट है। यदि गति अधिक है, तो वह वास्तविक परिस्थितियों पर निर्भर करती है। हालांकि, सामान्य उत्पादन उद्योगों के ऑन-साइट वातावरण, कर्मचारियों की सुरक्षा, और AGV कार्य करते समय लोड के वजन को ध्यान में रखते हुए, यह सुझाव दिया जाता है कि गति 30 मीटर/मिनट से अधिक नहीं होनी चाहिए। (ट्रांसफॉर्मर उद्योग में अतिसूक्ष्म मानक वाहनों के लिए 20 मीटर/मिनट) बाहरी वाहनों की अधिकतम गति सेटिंग 5-10 किमी/घंटा है, और बंदरगाह वाहनों की अधिकतम गति 36 किमी/घंटा है। निरंतर विचरण ट्रांसमिशन डिवाइस से सुसज्जित।
बैटरी क्षमता: सामान्य रूप से उपयोग की जाने वाली 50-1000AH (अम्पियर-घंटा) की श्रृंखला, जो मोटर शक्ति/पहिया व्यास का आकार/ढलान चढ़ना/अधिकतम गति/स्थिरता समय (खाली से पूर्ण लौटाव/पूर्ण लोड) और अन्य डेटा पर आधारित है। वर्तमान में, सामान्य रूप से उपयोग की जाने वाले 100 टन AGV की बैटरी क्षमता 4 घंटे के लिए 96V300AH है, खाली और पूर्ण लोड के लिए।
लांगयू पावर सिस्टम: शुद्ध इलेक्ट्रिक सिस्टम, ऑटोमोबाइल ग्रेड निर्भरता-मुक्त फेरिक फॉस्फेट लिथियम बैटरी का उपयोग ऊर्जा उत्पादन के लिए
बैटरी कार्यान्वयन तापमान: सामान्य मानक बैटरी कार्यान्वयन तापमान -20° से 45° और चरम तापमान -40° से 65° (स्व-गर्मी डिवाइस या एयर कंडीशनिंग से सुसज्जित)। चार्जिंग तापमान 0 डिग्री से अधिक होना चाहिए।
चार्जिंग विधि: मैनुअल चार्जिंग या स्वचालित चार्जिंग (जब AGV स्वचालित रूप से यह पाता है कि यह सेट मान से कम है, तो यह स्वचालित रूप से चार्जिंग डिवाइस पर चला जाता है और स्वचालित रूप से चार्जिंग करता है), स्वचालित चार्जिंग में टचलेस पावर सप्लाई, टेस्ट चार्जिंग, और बॉटम चार्जिंग शामिल है।
AGV नेविगेशन विधियाँ मुख्य रूप से निम्नलिखित हैं:
1. चुंबकीय स्ट्रिप नेविगेशन
इलेक्ट्रोमैग्नेटिक गाइडेंस के समान, यह सड़क की सतह पर चुंबकीय टेप का उपयोग करता है जो जमीन के नीचे धातु तारों को दफनाने के बजाय चुंबकीय इंडक्शन सिग्नलों के माध्यम से गाइडेंस को वास्तविक बनाता है। यह अधिक लचीला है, यह पथ को बदलना या विस्तारित करना आसान है, और चुंबकीय टेप लगाना सरल और आसान है, लेकिन यह गाइडेंस विधि चक्र के चारों ओर के धातु सामग्रियों से आसानी से व्यवधान की प्रतिक्रिया देती है, और यंत्रों से चुंबकीय टेप आसानी से नष्ट हो सकता है, इसलिए गाइडेंस की विश्वसनीयता बाहरी दुनिया से बहुत प्रभावित होती है।
2. लेजर SLAM नेविगेशन
लेजर गाइडेंस AGV चालन मार्ग के चारों ओर यथार्थ स्थित लेजर रिफ्लेक्टर्स को इंस्टॉल करता है। AGV लेजर स्कैनर के माध्यम से लेजर बीम उत्सर्जित करता है और रिफ्लेक्टर्स द्वारा प्रतिबिंबित लेजर बीम को संग्रहीत करता है ताकि इसकी वर्तमान स्थिति और दिशा का निर्धारण किया जा सके, और AGV को निरंतर त्रिकोणीय ज्यामितीय ऑपरेशनों के माध्यम से गाइड किया जा सके। इस तकनीक का सबसे बड़ा फायदा यह है कि AGV को यथार्थ रूप से स्थित किया जा सकता है; जमीन पर कोई अन्य स्थिति सुविधाएं आवश्यक नहीं हैं; चालन मार्ग लचीला और विभिन्न ऑन-साइट वातावरणों के लिए अनुकूलनीय हो सकता है। यह वर्तमान में कई विदेशी AGV निर्माताओं द्वारा पसंद की जाने वाली उन्नत गाइडेंस विधि है; दोष यह है कि निर्माण लागत उच्च है, पर्यावरण की आवश्यकताएं अपेक्षाकृत कठिन हैं (बाहरी प्रकाश, जमीन की आवश्यकताएं, दृश्यता की आवश्यकताएं, आदि), और यह बाहरी उपयोग के लिए उपयुक्त नहीं है (विशेष रूप से वर्षा, बर्फ, और कुछ धुंआ के लिए संवेदनशील)।
3. GNSS-GPS/BeiDou नेविगेशन।
बुनियादी पैरामीटर
AGV प्रकार: बैक-लोडिंग लिफ्टिंग
निर्धारित लोड KG: 12000 KG
वाहन का द्रव्यमान: 3000 KG
चालन मोड: डिफ़्रेंशियल
चलने की दिशा: सीधे आगे और पीछे, बाएं और दाएं, जगह पर घूर्णन
नेविगेशन विधि: चुंबकीय स्ट्रिप
शरीर का आकार (लंबाई, चौड़ाई और ऊंचाई) mm: 3400x1200x440
चासिस ग्राउंड क्लियरेंस mm: 35
उपयोग की स्थिति: आंतरिक
स्थिति यथार्थता mm: ±10mm
नेविगेशन यथार्थता mm: ±10mm
चालन गति खाली/पूर्ण लोड: 0-15
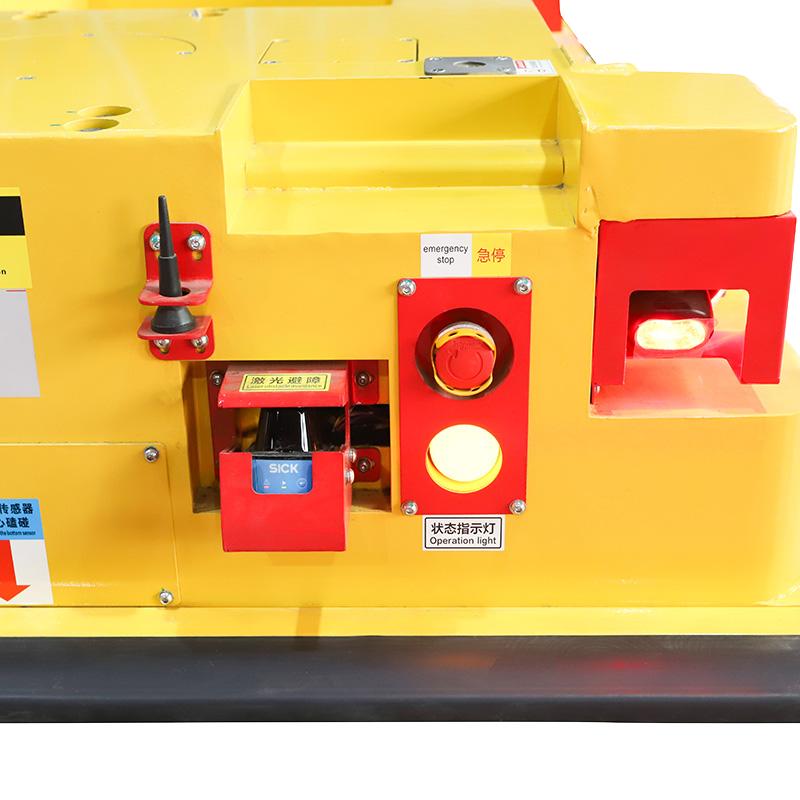
सुरक्षा संरक्षण: लेजर बाधा टालन सेंसर + सुरक्षा किनारा स्पर्श + ध्वनि और प्रकाश चेतावनी + आपातकालीन बंद करने का बटन

संबंधित उत्पाद





संबंधित ज्ञान
-
 मुख्य ट्रांसफॉर्मर दुर्घटनाएँ और हल्की गैस संचालन में समस्याएँ१. दुर्घटना रिकॉर्ड (१९ मार्च, २०१९)१९ मार्च, २०१९ को १६:१३ बजे, निगरानी पृष्ठभूमि ने तीसरे मुख्य ट्रांसफॉर्मर के हल्के गैस क्रियाकलाप की सूचना दी। बिजली ट्रांसफॉर्मर के संचालन के लिए कोड (DL/T572-2010) के अनुसार, संचालन एवं रखरखाव (O&M) कर्मचारियों ने तीसरे मुख्य ट्रांसफॉर्मर की स्थानीय स्थिति का निरीक्षण किया।स्थानीय पुष्टि: तीसरे मुख्य ट्रांसफॉर्मर के WBH गैर-विद्युत सुरक्षा पैनल ने ट्रांसफॉर्मर शरीर के चरण B के हल्के गैस क्रियाकलाप की सूचना दी, और रीसेट कार्यान्वित नहीं हुआ। O&M कर्म02/05/2026
मुख्य ट्रांसफॉर्मर दुर्घटनाएँ और हल्की गैस संचालन में समस्याएँ१. दुर्घटना रिकॉर्ड (१९ मार्च, २०१९)१९ मार्च, २०१९ को १६:१३ बजे, निगरानी पृष्ठभूमि ने तीसरे मुख्य ट्रांसफॉर्मर के हल्के गैस क्रियाकलाप की सूचना दी। बिजली ट्रांसफॉर्मर के संचालन के लिए कोड (DL/T572-2010) के अनुसार, संचालन एवं रखरखाव (O&M) कर्मचारियों ने तीसरे मुख्य ट्रांसफॉर्मर की स्थानीय स्थिति का निरीक्षण किया।स्थानीय पुष्टि: तीसरे मुख्य ट्रांसफॉर्मर के WBH गैर-विद्युत सुरक्षा पैनल ने ट्रांसफॉर्मर शरीर के चरण B के हल्के गैस क्रियाकलाप की सूचना दी, और रीसेट कार्यान्वित नहीं हुआ। O&M कर्म02/05/2026 -
 10kV वितरण लाइनों में एक-फेज ग्राउंडिंग की दोष और संभालएकल-चरण भू-दोष की विशेषताएँ और उनका पता लगाने वाले उपकरण१. एकल-चरण भू-दोष की विशेषताएँकेंद्रीय अलार्म संकेत:चेतावनी घंटी बजती है, और “[X] किलोवोल्ट बस सेक्शन [Y] पर भू-दोष” लेबल वाला सूचक लैंप प्रकाशित हो जाता है। पीटरसन कुंडली (आर्क दमन कुंडली) द्वारा तटस्थ बिंदु को भू-संपर्कित करने वाली प्रणालियों में, “पीटरसन कुंडली संचालित” सूचक भी प्रकाशित हो जाता है।विद्युतरोधन निगरानी वोल्टमीटर के संकेत:दोषयुक्त चरण का वोल्टेज कम हो जाता है (अपूर्ण भू-संपर्कन की स्थिति में) या शून्य तक गिर जाता है (दृढ़ भ01/30/2026
10kV वितरण लाइनों में एक-फेज ग्राउंडिंग की दोष और संभालएकल-चरण भू-दोष की विशेषताएँ और उनका पता लगाने वाले उपकरण१. एकल-चरण भू-दोष की विशेषताएँकेंद्रीय अलार्म संकेत:चेतावनी घंटी बजती है, और “[X] किलोवोल्ट बस सेक्शन [Y] पर भू-दोष” लेबल वाला सूचक लैंप प्रकाशित हो जाता है। पीटरसन कुंडली (आर्क दमन कुंडली) द्वारा तटस्थ बिंदु को भू-संपर्कित करने वाली प्रणालियों में, “पीटरसन कुंडली संचालित” सूचक भी प्रकाशित हो जाता है।विद्युतरोधन निगरानी वोल्टमीटर के संकेत:दोषयुक्त चरण का वोल्टेज कम हो जाता है (अपूर्ण भू-संपर्कन की स्थिति में) या शून्य तक गिर जाता है (दृढ़ भ01/30/2026 -
 ११०किलोवोल्ट से २२०किलोवोल्ट तक की विद्युत ग्रिड ट्रांसफॉर्मरों के लिए मध्य बिंदु ग्राउंडिंग संचालन मोड110kV से 220kV तक की विद्युत ग्रिड ट्रांसफॉर्मरों के न्यूट्रल पॉइंट ग्राउंडिंग संचालन मोड की व्यवस्था ट्रांसफॉर्मर न्यूट्रल पॉइंट की इंसुलेशन टोलरेंस की आवश्यकताओं को पूरा करनी चाहिए, और साथ ही सबस्टेशनों के जीरो-सीक्वेंस इम्पीडेंस को लगभग अपरिवर्तित रखने का प्रयास करना चाहिए, जबकि सिस्टम में किसी भी शॉर्ट-सर्किट पॉइंट पर जीरो-सीक्वेंस की संकलित इम्पीडेंस पॉजिटिव-सीक्वेंस की संकलित इम्पीडेंस से तीन गुना से अधिक नहीं होनी चाहिए।नए निर्माण और तकनीकी सुधार परियोजनाओं में 220kV और 110kV ट्रांसफॉर्मर01/29/2026
११०किलोवोल्ट से २२०किलोवोल्ट तक की विद्युत ग्रिड ट्रांसफॉर्मरों के लिए मध्य बिंदु ग्राउंडिंग संचालन मोड110kV से 220kV तक की विद्युत ग्रिड ट्रांसफॉर्मरों के न्यूट्रल पॉइंट ग्राउंडिंग संचालन मोड की व्यवस्था ट्रांसफॉर्मर न्यूट्रल पॉइंट की इंसुलेशन टोलरेंस की आवश्यकताओं को पूरा करनी चाहिए, और साथ ही सबस्टेशनों के जीरो-सीक्वेंस इम्पीडेंस को लगभग अपरिवर्तित रखने का प्रयास करना चाहिए, जबकि सिस्टम में किसी भी शॉर्ट-सर्किट पॉइंट पर जीरो-सीक्वेंस की संकलित इम्पीडेंस पॉजिटिव-सीक्वेंस की संकलित इम्पीडेंस से तीन गुना से अधिक नहीं होनी चाहिए।नए निर्माण और तकनीकी सुधार परियोजनाओं में 220kV और 110kV ट्रांसफॉर्मर01/29/2026 -
 क्यों सबस्टेशन चट्टानें, कंकड़, छोटी चट्टानें और दलदली चट्टान का उपयोग करते हैं?सबस्टेशन में क्यों पत्थर, ग्रेवल, पेबल और क्रश्ड रॉक का उपयोग किया जाता है?सबस्टेशनों में, विद्युत और वितरण ट्रांसफॉर्मर, प्रसारण लाइनें, वोल्टेज ट्रांसफॉर्मर, करंट ट्रांसफॉर्मर और डिसकनेक्ट स्विच जैसी उपकरणों के लिए ग्राउंडिंग की आवश्यकता होती है। ग्राउंडिंग के अलावा, अब हम गहराई से जानेंगे कि क्यों ग्रेवल और क्रश्ड स्टोन सबस्टेशनों में आमतौर पर उपयोग किए जाते हैं। यद्यपि वे सामान्य दिखते हैं, फिर भी ये पत्थर सुरक्षा और कार्यात्मक रोल में एक महत्वपूर्ण भूमिका निभाते हैं।सबस्टेशन ग्राउंडिंग डिज़01/29/2026
क्यों सबस्टेशन चट्टानें, कंकड़, छोटी चट्टानें और दलदली चट्टान का उपयोग करते हैं?सबस्टेशन में क्यों पत्थर, ग्रेवल, पेबल और क्रश्ड रॉक का उपयोग किया जाता है?सबस्टेशनों में, विद्युत और वितरण ट्रांसफॉर्मर, प्रसारण लाइनें, वोल्टेज ट्रांसफॉर्मर, करंट ट्रांसफॉर्मर और डिसकनेक्ट स्विच जैसी उपकरणों के लिए ग्राउंडिंग की आवश्यकता होती है। ग्राउंडिंग के अलावा, अब हम गहराई से जानेंगे कि क्यों ग्रेवल और क्रश्ड स्टोन सबस्टेशनों में आमतौर पर उपयोग किए जाते हैं। यद्यपि वे सामान्य दिखते हैं, फिर भी ये पत्थर सुरक्षा और कार्यात्मक रोल में एक महत्वपूर्ण भूमिका निभाते हैं।सबस्टेशन ग्राउंडिंग डिज़01/29/2026 -
 क्यों एक ट्रांसफॉर्मर कोर केवल एक बिंदु पर ग्राउंड किया जाना चाहिए? क्या मल्टी-पॉइंट ग्राउंडिंग अधिक विश्वसनीय नहीं है?ट्रांसफॉर्मर कोर को ग्राउंड किया जाने की क्यों आवश्यकता होती है?चालू होने पर, ट्रांसफॉर्मर कोर, साथ ही कोर और वाइंडिंग्स को ठहराने वाली धातु की संरचनाएँ, भाग और घटक, सभी मजबूत विद्युत क्षेत्र में स्थित होते हैं। इस विद्युत क्षेत्र के प्रभाव से, वे भूमि के सापेक्ष रूप से उच्च विभव प्राप्त करते हैं। यदि कोर ग्राउंड नहीं किया जाता है, तो कोर और ग्राउंड क्लैंपिंग संरचनाओं और टैंक के बीच विभवांतर होगा, जो अनियमित डिस्चार्ज का कारण बन सकता है।इसके अलावा, चालू होने पर, वाइंडिंग्स के चारों ओर एक मजबूत च01/29/2026
क्यों एक ट्रांसफॉर्मर कोर केवल एक बिंदु पर ग्राउंड किया जाना चाहिए? क्या मल्टी-पॉइंट ग्राउंडिंग अधिक विश्वसनीय नहीं है?ट्रांसफॉर्मर कोर को ग्राउंड किया जाने की क्यों आवश्यकता होती है?चालू होने पर, ट्रांसफॉर्मर कोर, साथ ही कोर और वाइंडिंग्स को ठहराने वाली धातु की संरचनाएँ, भाग और घटक, सभी मजबूत विद्युत क्षेत्र में स्थित होते हैं। इस विद्युत क्षेत्र के प्रभाव से, वे भूमि के सापेक्ष रूप से उच्च विभव प्राप्त करते हैं। यदि कोर ग्राउंड नहीं किया जाता है, तो कोर और ग्राउंड क्लैंपिंग संरचनाओं और टैंक के बीच विभवांतर होगा, जो अनियमित डिस्चार्ज का कारण बन सकता है।इसके अलावा, चालू होने पर, वाइंडिंग्स के चारों ओर एक मजबूत च01/29/2026 -
 ट्रांसफॉर्मर न्यूट्रल ग्राउंडिंग समझनाI. न्यूट्रल पॉइंट क्या है?ट्रांसफोर्मर और जनरेटर में, न्यूट्रल पॉइंट एक विशिष्ट बिंदु होता है जहाँ इस बिंदु और प्रत्येक बाहरी टर्मिनल के बीच निरपेक्ष वोल्टेज समान होता है। नीचे दिए गए आरेख में, बिंदुOन्यूट्रल पॉइंट को दर्शाता है।II. न्यूट्रल पॉइंट को ग्राउंडिंग क्यों किया जाता है?तीन-धारा AC विद्युत प्रणाली में न्यूट्रल पॉइंट और पृथ्वी के बीच की विद्युत कनेक्शन विधि कोन्यूट्रल ग्राउंडिंग विधिकहा जाता है। यह ग्राउंडिंग विधि सीधे प्रभाव डालती है:विद्युत ग्रिड की सुरक्षा, विश्वसनीयता और अर्थशास्त्र01/29/2026
ट्रांसफॉर्मर न्यूट्रल ग्राउंडिंग समझनाI. न्यूट्रल पॉइंट क्या है?ट्रांसफोर्मर और जनरेटर में, न्यूट्रल पॉइंट एक विशिष्ट बिंदु होता है जहाँ इस बिंदु और प्रत्येक बाहरी टर्मिनल के बीच निरपेक्ष वोल्टेज समान होता है। नीचे दिए गए आरेख में, बिंदुOन्यूट्रल पॉइंट को दर्शाता है।II. न्यूट्रल पॉइंट को ग्राउंडिंग क्यों किया जाता है?तीन-धारा AC विद्युत प्रणाली में न्यूट्रल पॉइंट और पृथ्वी के बीच की विद्युत कनेक्शन विधि कोन्यूट्रल ग्राउंडिंग विधिकहा जाता है। यह ग्राउंडिंग विधि सीधे प्रभाव डालती है:विद्युत ग्रिड की सुरक्षा, विश्वसनीयता और अर्थशास्त्र01/29/2026
संबंधित समाधान
-
 संकलित पवन-सौर हाइब्रिड विद्युत समाधान दूरस्थ द्वीपों के लिएसारांश यह प्रस्ताव एक नवीनतम एकीकृत ऊर्जा समाधान प्रस्तुत करता है, जो वायु शक्ति, प्रकाश-विद्युत उत्पादन, पंपड जल भंडारण और समुद्री जल उपचार तकनीकों को गहराई से जोड़ता है। इसका उद्देश्य दूरस्थ द्वीपों द्वारा सामना किए जा रहे मुख्य चुनौतियों, जिनमें ग्रिड कवरेज की कठिनाई, डीजल ऊर्जा उत्पादन की उच्च लागत, पारंपरिक बैटरी भंडारण की सीमाएं, और शुद्ध जल संसाधियों की कमी, को प्रणालीगत रूप से संबोधित करना है। यह समाधान "ऊर्जा आपूर्ति - ऊर्जा भंडारण - जल आपूर्ति" में सहयोग और स्वतंत्रता प्राप्त करता है10/17/2025
संकलित पवन-सौर हाइब्रिड विद्युत समाधान दूरस्थ द्वीपों के लिएसारांश यह प्रस्ताव एक नवीनतम एकीकृत ऊर्जा समाधान प्रस्तुत करता है, जो वायु शक्ति, प्रकाश-विद्युत उत्पादन, पंपड जल भंडारण और समुद्री जल उपचार तकनीकों को गहराई से जोड़ता है। इसका उद्देश्य दूरस्थ द्वीपों द्वारा सामना किए जा रहे मुख्य चुनौतियों, जिनमें ग्रिड कवरेज की कठिनाई, डीजल ऊर्जा उत्पादन की उच्च लागत, पारंपरिक बैटरी भंडारण की सीमाएं, और शुद्ध जल संसाधियों की कमी, को प्रणालीगत रूप से संबोधित करना है। यह समाधान "ऊर्जा आपूर्ति - ऊर्जा भंडारण - जल आपूर्ति" में सहयोग और स्वतंत्रता प्राप्त करता है10/17/2025 -
 एक इंटेलिजेंट वायु-सौर हाइब्रिड सिस्टम फजी-पीआईडी नियंत्रण के साथ बैटरी प्रबंधन और एमपीपीटी में सुधार के लिएसारांशयह प्रस्ताव उन्नत नियंत्रण प्रौद्योगिकी पर आधारित एक वायु-सौर हाइब्रिड विद्युत उत्पादन प्रणाली का प्रस्ताव करता है, जिसका उद्देश्य दूरस्थ क्षेत्रों और विशेष अनुप्रयोगों के ऊर्जा आवश्यकताओं को कुशल और आर्थिक रूप से पूरा करना है। प्रणाली का महत्वपूर्ण हिस्सा एक ATmega16 माइक्रोप्रोसेसर केंद्रित बुद्धिमान नियंत्रण प्रणाली है। यह प्रणाली वायु और सौर ऊर्जा दोनों के लिए अधिकतम शक्ति बिंदु प्रक्षेपण (MPPT) करती है और बैटरी - एक महत्वपूर्ण घटक - के लिए चार्जिंग/डिचार्जिंग प्रबंधन के लिए PID और फज़10/17/2025
एक इंटेलिजेंट वायु-सौर हाइब्रिड सिस्टम फजी-पीआईडी नियंत्रण के साथ बैटरी प्रबंधन और एमपीपीटी में सुधार के लिएसारांशयह प्रस्ताव उन्नत नियंत्रण प्रौद्योगिकी पर आधारित एक वायु-सौर हाइब्रिड विद्युत उत्पादन प्रणाली का प्रस्ताव करता है, जिसका उद्देश्य दूरस्थ क्षेत्रों और विशेष अनुप्रयोगों के ऊर्जा आवश्यकताओं को कुशल और आर्थिक रूप से पूरा करना है। प्रणाली का महत्वपूर्ण हिस्सा एक ATmega16 माइक्रोप्रोसेसर केंद्रित बुद्धिमान नियंत्रण प्रणाली है। यह प्रणाली वायु और सौर ऊर्जा दोनों के लिए अधिकतम शक्ति बिंदु प्रक्षेपण (MPPT) करती है और बैटरी - एक महत्वपूर्ण घटक - के लिए चार्जिंग/डिचार्जिंग प्रबंधन के लिए PID और फज़10/17/2025 -
 सस्ती विंड-सोलर हाइब्रिड समाधान: बक-बूस्ट कन्वर्टर और स्मार्ट चार्जिंग सिस्टम की लागत कम करते हैंसारांशयह समाधान एक नवीन उच्च-कार्यक्षमता वायु-सौर हाइब्रिड पावर जनरेशन सिस्टम का प्रस्ताव करता है। मौजूदा तकनीकों के मुख्य कमियों, जैसे कम ऊर्जा उपयोग, छोटी बैटरी की लंबाई और खराब सिस्टम स्थिरता, को दूर करने के लिए, यह सिस्टम पूरी तरह से डिजिटल नियंत्रित बक-बूस्ट डीसी/डीसी कन्वर्टर, इंटरलीव्ड पैरेलल तकनीक और एक बुद्धिमत्ता-संचालित तीन-चरणीय चार्जिंग एल्गोरिथ्म का उपयोग करता है। यह अधिक विस्तृत वायु गति और सौर विकिरण की श्रेणी में अधिकतम शक्ति बिंदु प्रतिफलन (MPPT) की सक्षमता प्रदान करता है, जिस10/17/2025
सस्ती विंड-सोलर हाइब्रिड समाधान: बक-बूस्ट कन्वर्टर और स्मार्ट चार्जिंग सिस्टम की लागत कम करते हैंसारांशयह समाधान एक नवीन उच्च-कार्यक्षमता वायु-सौर हाइब्रिड पावर जनरेशन सिस्टम का प्रस्ताव करता है। मौजूदा तकनीकों के मुख्य कमियों, जैसे कम ऊर्जा उपयोग, छोटी बैटरी की लंबाई और खराब सिस्टम स्थिरता, को दूर करने के लिए, यह सिस्टम पूरी तरह से डिजिटल नियंत्रित बक-बूस्ट डीसी/डीसी कन्वर्टर, इंटरलीव्ड पैरेलल तकनीक और एक बुद्धिमत्ता-संचालित तीन-चरणीय चार्जिंग एल्गोरिथ्म का उपयोग करता है। यह अधिक विस्तृत वायु गति और सौर विकिरण की श्रेणी में अधिकतम शक्ति बिंदु प्रतिफलन (MPPT) की सक्षमता प्रदान करता है, जिस10/17/2025






