१२ टन भारी कार्य गतिशील वाहन



मुख्य विशेषताहरू
| ब्राण्ड | Wone Store |
| मॉडल नंबर | १२ टन भारी कार्य गतिशील वाहन |
| निर्धारित भार | 12 ton |
| श्रृंखला | LY-AK-12T |
सप्लायरद्वारा प्रदान गरिएको उत्पादन विवरण
AGV सस्पेन्सन विधि: स्प्रिंग, हाइड्रोलिक
AGV ड्राइविङ्ग गति: आंतरिक AGV की गति ०-६०म/मिनट होती है। यदि गति अधिक हो, तो वह वास्तविक परिस्थितिको आधार लिएको हुन्छ। तर, सामान्य उत्पादन उद्योगको जगहको परिवेश, कर्मचारीको सुरक्षा र AGV ले काम गर्दा भारको वजनको विचार गर्दा, यो सुझाव दिइन्छ कि गति ३०म/मिनट भन्दा बढी नहुनुपर्छ (ट्रान्सफोर्मर उद्योगमा अतिसूक्ष्म मानक वाहनको लागि २०म/मिनट)। बाहिरी वाहनको अधिकतम गति सेटिङ ५-१०किमी/घण्टा र बन्दरगाह वाहनको अधिकतम गति ३६किमी/घण्टा हुन्छ। निरन्तर विकल्प ट्रान्समिशन डिभाइससँग लगाइएको हुन्छ।
बैटरी क्षमता: सामान्य रूपमा ५०-१०००AH (ampere-hour) को बीचमा प्रयोग गरिन्छ, यो गणना गरिन्छ मोटर शक्ति/चाकी व्यास आकार/ढाल चढ्न/अधिकतम गति/स्थिरता समय (खाली देखि पूर्ण लौटाउन/पूर्ण भार) र अन्य डेटाको आधारमा। वर्तमानमा, लागातार १०० टन AGV लाई ९६V300AH बैटरी क्षमता दिइन्छ, जसले ४ घण्टाको लागि खाली र पूर्ण भार लिएको समय दिन्छ।
लांग्यू शक्ति प्रणाली: शुद्ध बिजुली प्रणाली, यसले ऑटोमोबाइल ग्रेड निर्धारण रहित लिथियम आयरन फोस्फेट बैटरी बिजुली उत्पादनको लागि प्रयोग गर्छ
बैटरी संचालन तापक्रम: सामान्य मानकले -२०° से ४५° तापमानमा बैटरी संचालन तापक्रम सुझाव दिन्छ र चरम तापमान -४०° से ६५° (स्व-गर्मीकरण विक्रम वा हवाको ठाउँ लगाएको)। चार्जिङ तापमान शून्य डिग्रीभन्दा ऊपर हुनुपर्छ।
चार्जिङ विधि: मानवीय चार्जिङ वा स्वचालित चार्जिङ (जब AGV स्वचालित रूपमा निर्धारित मानको तल छन् भने, यो स्वचालित रूपमा चार्जिङ डिभाइसमा चालाउँदा जान्छ र स्वचालित रूपमा चार्जिङ गर्ने), स्वचालित चार्जिङ योग्य अन्तर्क्रियाहीन बिजुली उपलब्धि, परीक्षण चार्जिङ, र तल चार्जिङ समावेश गर्छ।
AGV नेविगेशन विधिहरू मुख्यतया यस्ता छन्:
१. चुंबकीय टेप नेविगेशन
इलेक्ट्रोमैग्नेटिक गाइडेन्स जस्तै, यसले सडकको सतहमा चुंबकीय टेपको उपयोग गर्छ जसले जमिनको तलमा धातु तार देखि बचाउँछ, र चुंबकीय इन्डक्सन सिग्नल द्वारा गाइडेन्स फालाउँछ। यसको फ्लेक्सिबिलिटी राम्रो छ, पथ परिवर्तन वा विस्तार गर्न सजिलो छ, र चुंबकीय टेप राख्न सजिलो छ, तर यस गाइडेन्स विधि लोकप्रिय चुंबकीय सामग्री द्वारा बाहिर भन्दा अधिक प्रभावित हुन्छ, र यसको अविश्वसनीयता चुंबकीय टेपलाई यंत्र द्वारा क्षतिग्रस्त हुने भन्दा बढी प्रभावित हुन्छ।
२. लेजर SLAM नेविगेशन
लेजर गाइडेन्स ले AGV ड्राइविङ रास्ताको आसपास अच्छो रूपमा स्थापित लेजर रिफ्लेक्टर लगाउँछ। AGV ले लेजर स्कैनर द्वारा लेजर बीम उत्सर्जित गर्छ र रिफ्लेक्टर द्वारा प्रतिबिम्बित लेजर बीमहरू एकत्र गर्छ र यसको वर्तमान स्थिति र दिशा निर्धारण गर्छ, र लगातार त्रिकोणमितिक गणना गर्दै AGV लाई गाइड गर्छ। यस प्रविधिको सबैभन्दा ठूलो फाइदा यो हो कि AGV लाई अच्छो रूपमा स्थान निर्धारण गर्न सकिन्छ; जमिनमा अन्य स्थान निर्धारण सुविधा आवश्यक छैन; ड्राइविङ रास्ता फ्लेक्सिबिल र विभिन्न जगहको परिवेशमा योग्य हुन सक्छ। यो विदेशी AGV निर्माताहरूको लागि वर्तमानमा उन्नत गाइडेन्स विधि हो; दोष यो हो कि निर्माण खर्च उच्च छ, पर्यावरण आवश्यकता अपेक्षाकृत कठिन छ (बाहिरी प्रकाश, जमिन आवश्यकता, दृश्यता आवश्यकता आदि), र यो बाहिरी प्रयोगको लागि उपयुक्त छैन (विशेष रूपमा बारा, बर्फ, र कोहरालाई लागि अत्यधिक संवेदनशील)।
३. GNSS-GPS/बेइडौ नेविगेशन।
मूलभूत परामितिहरू
AGV प्रकार: पीछा लोडिङ उठाउने
निर्धारित भार KG: १२००० KG
वाहनको भार: ३००० KG
ड्राइविङ प्रकार: डिफरेन्सियल
चलन दिशा: सीधा आगामी र पीछामी, बाएँ र दाएँ, जगहमा घुमाउने
नेविगेशन विधि: चुंबकीय टेप
शरीरको आकार (लामो, चौडो र उचाउ): ३४००x१२००x४४० mm
चासिस जमिन तल अन्तर mm: ३५
प्रयोग स्थिति: आंतरिक
स्थान निर्णय शुद्धता mm: ±१०mm
नेविगेशन शुद्धता mm: ±१०mm
खाली/पूर्ण भार लिएको ड्राइविङ गति: ०-१५
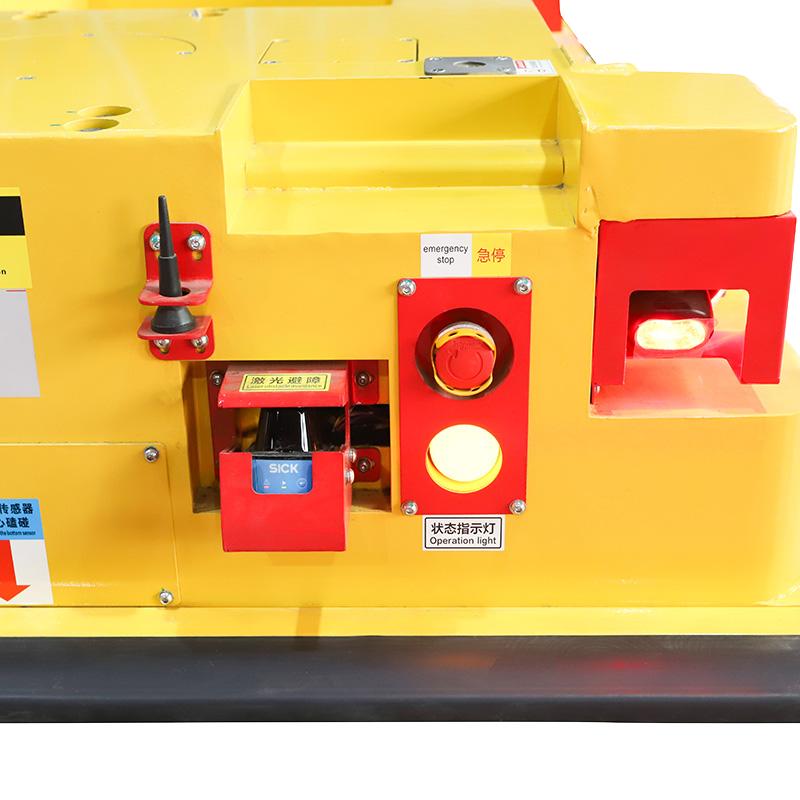
सुरक्षा संरक्षण: लेजर बाधा टोकिङ सेन्सर + सुरक्षा अग्रिम छेद + शब्द र प्रकाश चेतावनी + आफ्नो बन्द गर्ने बटन

सम्बन्धित उत्पादहरू





सम्बन्धित ज्ञान
-
 मुख्य ट्रान्सफार्मर संघटना र हल्को गैस कार्यान्वयन समस्याहरू१. दुर्घटनाको रेकर्ड (मार्च १९, २०१९)मार्च १९, २०१९ को १६:१३ मा, निगरानी पछाडीले नं. ३ प्रमुख ट्रान्सफारमरको हल्को ग्यास कार्यको बारेमा सूचना दिए। पावर ट्रान्सफार्मरको संचालन कोड (DL/T572-2010) अनुसार, संचालन र रक्षणावधि (O&M) कर्मचारीहरूले नं. ३ प्रमुख ट्रान्सफारमरको स्थानीय स्थिति जाँच गर्यौं।स्थानीय पुष्टी: नं. ३ प्रमुख ट्रान्सफारमरको WBH गैर-विद्युतीय संरक्षण पैनलले ट्रान्सफारमर शरीरको फेज B मा हल्को ग्यास कार्यको बारेमा सूचना दिए, र रिसेट असफल थियो। O&M कर्मचारीहरूले नं. ३ प्रमुख ट02/05/2026
मुख्य ट्रान्सफार्मर संघटना र हल्को गैस कार्यान्वयन समस्याहरू१. दुर्घटनाको रेकर्ड (मार्च १९, २०१९)मार्च १९, २०१९ को १६:१३ मा, निगरानी पछाडीले नं. ३ प्रमुख ट्रान्सफारमरको हल्को ग्यास कार्यको बारेमा सूचना दिए। पावर ट्रान्सफार्मरको संचालन कोड (DL/T572-2010) अनुसार, संचालन र रक्षणावधि (O&M) कर्मचारीहरूले नं. ३ प्रमुख ट्रान्सफारमरको स्थानीय स्थिति जाँच गर्यौं।स्थानीय पुष्टी: नं. ३ प्रमुख ट्रान्सफारमरको WBH गैर-विद्युतीय संरक्षण पैनलले ट्रान्सफारमर शरीरको फेज B मा हल्को ग्यास कार्यको बारेमा सूचना दिए, र रिसेट असफल थियो। O&M कर्मचारीहरूले नं. ३ प्रमुख ट02/05/2026 -
 १०केवी वितरण रेखामा एकल-प्रेरण ग्राउंडिङ दोष र उसको समाधानएकल-चरण भू-दोषका विशेषताहरू र पत्ता लगाउने उपकरणहरू१. एकल-चरण भू-दोषका विशेषताहरूकेन्द्रीय अलार्म संकेतहरू:चेतावनी घण्टा बज्छ, र "एक्स केभी बस सेक्सन वाइ तिर भू-दोष" लेबल गरिएको सूचक बत्ती जल्छ। पेटर्सन कुण्डली (आर्क उपशमन कुण्डली) द्वारा तटस्थ बिन्दु भू-संयोजित गरिएका प्रणालीहरूमा, "पेटर्सन कुण्डली सञ्चालित" सूचक पनि जल्छ।विद्युत् रोधकता निगरानी भोल्टमिटर संकेतहरू:दोषयुक्त चरणको भोल्टेज घट्छ (अपूर्ण भू-संयोजनको अवस्थामा) वा शून्यमा झर्छ (दृढ भू-संयोजनको अवस्थामा)।अरू दुई चरणहरूको भोल्टेज बढ्छ—अ01/30/2026
१०केवी वितरण रेखामा एकल-प्रेरण ग्राउंडिङ दोष र उसको समाधानएकल-चरण भू-दोषका विशेषताहरू र पत्ता लगाउने उपकरणहरू१. एकल-चरण भू-दोषका विशेषताहरूकेन्द्रीय अलार्म संकेतहरू:चेतावनी घण्टा बज्छ, र "एक्स केभी बस सेक्सन वाइ तिर भू-दोष" लेबल गरिएको सूचक बत्ती जल्छ। पेटर्सन कुण्डली (आर्क उपशमन कुण्डली) द्वारा तटस्थ बिन्दु भू-संयोजित गरिएका प्रणालीहरूमा, "पेटर्सन कुण्डली सञ्चालित" सूचक पनि जल्छ।विद्युत् रोधकता निगरानी भोल्टमिटर संकेतहरू:दोषयुक्त चरणको भोल्टेज घट्छ (अपूर्ण भू-संयोजनको अवस्थामा) वा शून्यमा झर्छ (दृढ भू-संयोजनको अवस्थामा)।अरू दुई चरणहरूको भोल्टेज बढ्छ—अ01/30/2026 -
 ११०किलोवोल्ट से २२०किलोवोल्ट तक की विद्युत ग्रिड परिवर्तकको न्यूट्रल बिन्दु ग्राउंडिङ ऑपरेशन मोड११०केवी र २२०केवी विद्युत ग्रिड ट्रान्सफोर्मरहरूको न्यूट्रल पाइन्ट ग्राउंडिङ ऑपरेशन मोडहरूको व्यवस्था ट्रान्सफोर्मरको न्यूट्रल पाइन्टको अवरोध बर्तिनुहोस् र सुबस्टेशनको जीरो-सिक्वेन्स इम्पीडन्स बाहेको बदल नहुने र निकाल्दा प्रणालीको कुनै बिन्दुमा जीरो-सिक्वेन्स विश्वस्त समग्र इम्पीडन्स धनात्मक-सिक्वेन्स विश्वस्त समग्र इम्पीडन्सको तीन गुना भन्दा बढी हुनुभएको हुनुपर्छ।निर्माण र तकनीकी सुधार विकास परियोजनाहरूमा २२०केवी र ११०केवी ट्रान्सफोर्मरहरूको न्यूट्रल पाइन्ट ग्राउंडिङ मोडहरू निम्न आवश्यकताहरूलाई01/29/2026
११०किलोवोल्ट से २२०किलोवोल्ट तक की विद्युत ग्रिड परिवर्तकको न्यूट्रल बिन्दु ग्राउंडिङ ऑपरेशन मोड११०केवी र २२०केवी विद्युत ग्रिड ट्रान्सफोर्मरहरूको न्यूट्रल पाइन्ट ग्राउंडिङ ऑपरेशन मोडहरूको व्यवस्था ट्रान्सफोर्मरको न्यूट्रल पाइन्टको अवरोध बर्तिनुहोस् र सुबस्टेशनको जीरो-सिक्वेन्स इम्पीडन्स बाहेको बदल नहुने र निकाल्दा प्रणालीको कुनै बिन्दुमा जीरो-सिक्वेन्स विश्वस्त समग्र इम्पीडन्स धनात्मक-सिक्वेन्स विश्वस्त समग्र इम्पीडन्सको तीन गुना भन्दा बढी हुनुभएको हुनुपर्छ।निर्माण र तकनीकी सुधार विकास परियोजनाहरूमा २२०केवी र ११०केवी ट्रान्सफोर्मरहरूको न्यूट्रल पाइन्ट ग्राउंडिङ मोडहरू निम्न आवश्यकताहरूलाई01/29/2026 -
 सबस्टेशनहरू किन पाथर ग्रेभल छोटो पाथर र चुर्न गरिएको चट्टान प्रयोग गर्छन्?सबस्टेशनहरूले भाँडा, बजर, छिटो र चुर्न ग्रेनलाई किन प्रयोग गर्छन्?सबस्टेशनहरूमा, विद्युत र वितरण ट्रान्सफार्मर, प्रसारण लाइनहरू, वोल्टेज ट्रान्सफार्मर, करंट ट्रान्सफार्मर र डिसकनेक्ट स्विच जस्ता उपकरणहरूले अवश्य ग्राउंडिङ गरिनुपर्छ। ग्राउंडिङ भन्दा बाहेक, अब हामी गहिरो रूपमा जान्छौं कि किन बजर र चुर्न ग्रेनलाई सबस्टेशनहरूमा सामान्यतया प्रयोग गरिन्छ। यी छिटो देखिन्थ्यो आम छन्, तर यी सुरक्षा र कार्यात्मक महत्वपूर्ण भूमिका खेल्छन्।सबस्टेशन ग्राउंडिङ डिझाइनमा—विशेष गरी जब धेरै ग्राउंडिङ विधिहरू प्रय01/29/2026
सबस्टेशनहरू किन पाथर ग्रेभल छोटो पाथर र चुर्न गरिएको चट्टान प्रयोग गर्छन्?सबस्टेशनहरूले भाँडा, बजर, छिटो र चुर्न ग्रेनलाई किन प्रयोग गर्छन्?सबस्टेशनहरूमा, विद्युत र वितरण ट्रान्सफार्मर, प्रसारण लाइनहरू, वोल्टेज ट्रान्सफार्मर, करंट ट्रान्सफार्मर र डिसकनेक्ट स्विच जस्ता उपकरणहरूले अवश्य ग्राउंडिङ गरिनुपर्छ। ग्राउंडिङ भन्दा बाहेक, अब हामी गहिरो रूपमा जान्छौं कि किन बजर र चुर्न ग्रेनलाई सबस्टेशनहरूमा सामान्यतया प्रयोग गरिन्छ। यी छिटो देखिन्थ्यो आम छन्, तर यी सुरक्षा र कार्यात्मक महत्वपूर्ण भूमिका खेल्छन्।सबस्टेशन ग्राउंडिङ डिझाइनमा—विशेष गरी जब धेरै ग्राउंडिङ विधिहरू प्रय01/29/2026 -
 यस्तो विद्युत ट्रान्सफार्मरको कोरलाई केवल एउटै बिन्दुमा ग्राउन्ड गर्नुपर्छ? धेरै बिन्दुहरूमा ग्राउन्ड गर्ने अधिक विश्वसनीय छैन?ट्रान्सफर्मर कोरलाई ग्राउंड गर्नुपर्छ किन?संचालनको समयमा, ट्रान्सफर्मर कोर र त्यसको धातु प्रणाली, भागहरू, र घटकहरू जसले कोर र वाइंडिङहरूलाई ठोक्दछन्, एउटा मजबुत विद्युत क्षेत्रमा अवस्थित छन्। यस विद्युत क्षेत्रको प्रभावमा, यी भागहरू धराको सापेक्षमा उच्च विभव प्राप्त गर्छन्। यदि कोर ग्राउंड गरिँदैन भने, कोर र ग्राउंड गरिएको फिक्सिङ संरचना र टङ बीचमा विभवान्तर रहनेछ, जुन अनिर्दिष्ट डिस्चार्ज हुन सक्छ।अतिरिक्तमा, संचालनको समयमा, वाइंडिङहरूको आसपास एक मजबुत चुम्बकीय क्षेत्र छ। कोर र विभिन्न धातु संर01/29/2026
यस्तो विद्युत ट्रान्सफार्मरको कोरलाई केवल एउटै बिन्दुमा ग्राउन्ड गर्नुपर्छ? धेरै बिन्दुहरूमा ग्राउन्ड गर्ने अधिक विश्वसनीय छैन?ट्रान्सफर्मर कोरलाई ग्राउंड गर्नुपर्छ किन?संचालनको समयमा, ट्रान्सफर्मर कोर र त्यसको धातु प्रणाली, भागहरू, र घटकहरू जसले कोर र वाइंडिङहरूलाई ठोक्दछन्, एउटा मजबुत विद्युत क्षेत्रमा अवस्थित छन्। यस विद्युत क्षेत्रको प्रभावमा, यी भागहरू धराको सापेक्षमा उच्च विभव प्राप्त गर्छन्। यदि कोर ग्राउंड गरिँदैन भने, कोर र ग्राउंड गरिएको फिक्सिङ संरचना र टङ बीचमा विभवान्तर रहनेछ, जुन अनिर्दिष्ट डिस्चार्ज हुन सक्छ।अतिरिक्तमा, संचालनको समयमा, वाइंडिङहरूको आसपास एक मजबुत चुम्बकीय क्षेत्र छ। कोर र विभिन्न धातु संर01/29/2026 -
 ट्रान्सफर्मर न्यूट्रल ग्राउंडिङको बुझाउनI. न्यूट्रल पाइंट क्या है?ट्रांसफोर्मर और जनरेटर में, न्यूट्रल पाइंट एक विशिष्ट बिंदु होता है जहाँ इस बिंदु और प्रत्येक बाह्य टर्मिनल के बीच निरपेक्ष वोल्टेज समान होता है। निम्नलिखित आरेख में, बिंदुOन्यूट्रल पाइंट को दर्शाता है।II. न्यूट्रल पाइंट को ग्राउंड क्यों किया जाता है?तीन-फेज एसी पावर सिस्टम में न्यूट्रल पाइंट और पृथ्वी के बीच की विद्युत संयोजन विधि कोन्यूट्रल ग्राउंडिंग विधिकहा जाता है। यह ग्राउंडिंग विधि सीधे प्रभाव डालती है:पावर ग्रिड की सुरक्षा, विश्वसनीयता और आर्थिकता पर;सिस्टम उपकर01/29/2026
ट्रान्सफर्मर न्यूट्रल ग्राउंडिङको बुझाउनI. न्यूट्रल पाइंट क्या है?ट्रांसफोर्मर और जनरेटर में, न्यूट्रल पाइंट एक विशिष्ट बिंदु होता है जहाँ इस बिंदु और प्रत्येक बाह्य टर्मिनल के बीच निरपेक्ष वोल्टेज समान होता है। निम्नलिखित आरेख में, बिंदुOन्यूट्रल पाइंट को दर्शाता है।II. न्यूट्रल पाइंट को ग्राउंड क्यों किया जाता है?तीन-फेज एसी पावर सिस्टम में न्यूट्रल पाइंट और पृथ्वी के बीच की विद्युत संयोजन विधि कोन्यूट्रल ग्राउंडिंग विधिकहा जाता है। यह ग्राउंडिंग विधि सीधे प्रभाव डालती है:पावर ग्रिड की सुरक्षा, विश्वसनीयता और आर्थिकता पर;सिस्टम उपकर01/29/2026
सम्बन्धित समाधान
-
 सामग्रीकृत वायु-सौर संयुक्त ऊर्जा समाधान दूरस्थ टुक्राहरूका लागिसारांशयो प्रस्ताव एउटा नवीन एकीकृत ऊर्जा समाधान प्रस्तुत गर्दछ जो बातास शक्ति, सौर ऊर्जा उत्पादन, पंप हाइड्रो स्टोरेज र समुद्र जल डिसलिनियसिकरण प्रविधिहरूलाई गहिरो रूपमा संयोजित गर्छ। यसको लक्ष्य अग्रिम टापुहरूले सामना गर्ने मुख्य चुनौतीहरू—मान्यता ग्रिड आफुल्लो आधारभूत छोराउन, डिझल शक्ति उत्पादनको उच्च खर्च, परम्परागत बैटरी स्टोरेजको सीमा, र शुद्ध जल स्रोतको कमी—को व्यवस्थित रूपमा समाधान गर्नु हो। यो समाधान "शक्ति आपूर्ति - ऊर्जा स्टोरेज - जल आपूर्ति" मा सहकार्य र स्वतंत्रता प्राप्त गर्दछ, टापु10/17/2025
सामग्रीकृत वायु-सौर संयुक्त ऊर्जा समाधान दूरस्थ टुक्राहरूका लागिसारांशयो प्रस्ताव एउटा नवीन एकीकृत ऊर्जा समाधान प्रस्तुत गर्दछ जो बातास शक्ति, सौर ऊर्जा उत्पादन, पंप हाइड्रो स्टोरेज र समुद्र जल डिसलिनियसिकरण प्रविधिहरूलाई गहिरो रूपमा संयोजित गर्छ। यसको लक्ष्य अग्रिम टापुहरूले सामना गर्ने मुख्य चुनौतीहरू—मान्यता ग्रिड आफुल्लो आधारभूत छोराउन, डिझल शक्ति उत्पादनको उच्च खर्च, परम्परागत बैटरी स्टोरेजको सीमा, र शुद्ध जल स्रोतको कमी—को व्यवस्थित रूपमा समाधान गर्नु हो। यो समाधान "शक्ति आपूर्ति - ऊर्जा स्टोरेज - जल आपूर्ति" मा सहकार्य र स्वतंत्रता प्राप्त गर्दछ, टापु10/17/2025 -
 एक बुद्धिमान वायु-सौर हाइब्रिड प्रणाली जसमा फजी-पीआइड नियन्त्रण सिस्टेम राखिएको छ जसले बैटरी प्रबन्धन र एमपीपीटीमा सुधार गर्दछसारांशयो प्रस्ताव उन्नत नियंत्रण प्रविधि आधारित हवाको-सौर संयुक्त विद्युत उत्पादन प्रणालीलाई प्रस्तुत गर्दछ, जसको उद्देश असुलभ क्षेत्रहरू र विशेष अनुप्रयोग स्थितिहरूमा शक्तिशील र आर्थिक रूपमा बिजुलीको आवश्यकतालाई समाधान गर्न हो। प्रणालीको मुख्य भाग एउटा ATmega16 माइक्रोप्रोसेसरको आधारमा केन्द्रित बुद्धिमत्तापूर्ण नियंत्रण प्रणाली हो। यो प्रणाली हवाको र सौर ऊर्जाको लागि अधिकतम शक्ति बिन्दु ट्रैकिङ (MPPT) गर्छ र PID र फजी नियंत्रणको संयोजित अल्गोरिथ्म लाई बाटेरीको चार्जिङ/डिस्चार्जिङ प्रबंधनको लाग10/17/2025
एक बुद्धिमान वायु-सौर हाइब्रिड प्रणाली जसमा फजी-पीआइड नियन्त्रण सिस्टेम राखिएको छ जसले बैटरी प्रबन्धन र एमपीपीटीमा सुधार गर्दछसारांशयो प्रस्ताव उन्नत नियंत्रण प्रविधि आधारित हवाको-सौर संयुक्त विद्युत उत्पादन प्रणालीलाई प्रस्तुत गर्दछ, जसको उद्देश असुलभ क्षेत्रहरू र विशेष अनुप्रयोग स्थितिहरूमा शक्तिशील र आर्थिक रूपमा बिजुलीको आवश्यकतालाई समाधान गर्न हो। प्रणालीको मुख्य भाग एउटा ATmega16 माइक्रोप्रोसेसरको आधारमा केन्द्रित बुद्धिमत्तापूर्ण नियंत्रण प्रणाली हो। यो प्रणाली हवाको र सौर ऊर्जाको लागि अधिकतम शक्ति बिन्दु ट्रैकिङ (MPPT) गर्छ र PID र फजी नियंत्रणको संयोजित अल्गोरिथ्म लाई बाटेरीको चार्जिङ/डिस्चार्जिङ प्रबंधनको लाग10/17/2025







