12tonnise raske AGV



Olulised atribuudid
| Bränd | Wone Store |
| Mudeli number | 12tonnise raske AGV |
| Nõutav kaal | 12 ton |
| Seeriad | LY-AK-12T |
Tarnijalt saadud tootekirjeldused
AGV-vaheleidja meetod: veeretik, hüdrauliline
AGV sõidukiirus: Sisemise AGV kiirus on 0-60m/min. Kui kiirus on kõrgem, siis see sõltub tegelikust olukorrast. Siiski, arvestades tavaliste tootmisettevõtete töökohta, isikute ohutust ja AGVi töötamisel nõutavat kaalu, soovitatakse, et kiirus ei peaks ületama 30m/min (transformaatorite tööstuses kasutatavate ülträhmade standardautode puhul 20m/min). Välismaiste sõidukite maksimaalne kiiruse seadistus on 5-10Km/H, sadamate sõidukite maksimaalne kiirus on 36Km/H. Varustatud järsktundliku edasiandmise seadmega.
Akukapasiteet: Tavaliselt kasutatakse 50-1000AH (amper-tundi) ulatuses, mis arvutatakse motori võimsuse/raedu läbimõõdu/mägilt tõusmise/maksimaalse kiiruse/pärandusaega (tühi tagasi täis/täislae) järgi. Praegu levinud 100 tonni AGV-d kasutatakse akuga 96V300AH 4 tunniks tühi ja täislae.
Langyu energiasüsteem: puhtalt elektriline süsteem, kasutab autokategooria hoolduseta liidi-fosfaadi akke energiaväljastamiseks
Aku töötemperatuur: normaalsete standardite järgi soovitatakse aku töötemperatuur -20° kuni 45° ning äärmiste temperatuuride korral -40° kuni 65° (varustatud endistesse segava seadmega või klimaatiseeriga). Laadimistemperatuur on üle 0 kraadi.
Laadimismeetod: käsitsi laadimine või automaatne laadimine (kui AGV automaatselt tuvastab, et see on madalam kui seatud väärtus, siis see automaatselt jookseb laadimisseadme juurde automaatseks laadimiseks), automaatne laadimine hõlmab kontaktivaba energiaedastamist, proovilaadimist ja alumise laadimise.
AGV navigeerimismeetodid peamiselt hõlmavad:
1. Maagnetriba navigeerimine
Sarnaselt elektromagnetilisele juhendamisele kasutatakse tee pinnal maagnetriba asemel maapinna all sepitut metallkihti, ja juhendamist saavutatakse maagnetinduktsiooniseadmete kaudu. See meetod on paindlikum, tee muutmine või laiendamine on lihtsam, maagnetriba paigaldamine on lihtne, kuid seda juhendamismeetodit on lihtsam takistada ümber asuvate metallmaterjalidega, maagnetriba võib kahjustuda masinate poolt, seega mõjutab väga palju välismoodust juhendamise usaldusväärsust.
2. Laser SLAM-navigeerimine
Laserjuhendamiseks paigaldatakse täpselt paigutatud laserreflektorid AGVi sõidutee ümber. AGV heidab laserkiirgu laser skaneerija kaudu ja kogub reflektorite poolt tagasi heidetud laserkiirgust, et määrata oma praegune asukoht ja suund, ja juhib AGV-i pidevalt kolmnurga geomeetria abil. Selle tehnoloogia suurim eelis on, et AGV saab täpselt positsioneerida; mitte mingid muid positsioneerimisvahendeid pole vaja maapinnal; sõiduteekonna saab olla paindlik ja sobib erinevate töökohtade keskkonnaga. See on praegu paljude välismaiste AGV tootjate poolt eelistatav kõrgeimate taseme juhendamismeetod; ebatõenäolisus on, et tootmiskulu on kõrge, keskkonna nõuded on suuremad (välise valguse, maapinna nõuded, nähtavuse nõuded jms), ebatõenäolisus on, et see ei sobi väljakas kasutamiseks (eriti on tundlik vihma, lumma ja udu vastu).
3. GNSS-GPS/Beidou navigeerimine.
Põhiline parameeter
AGV tüüp: Tagant laetav
Määratud lae KG: 12000 KG
Sõiduki mass: 3000 KG
Juhendamismeetod: Diferentsiaalne
Liikumissuund: Otse edasi ja tagasi, vasakule ja paremale, koht pöördub
Navigeerimismeetod: Maagnetriba
Kere mõõtmed (pikkus, laius ja kõrgus) mm: 3400x1200x440
Aluspõhikõrgus mm: 35
Kasutussenaarium: Sisemine
Positsioneerimistäpsus mm: ±10mm
Navigeerimistäpsus mm: ±10mm
Tühja/täislae sõidukiirus: 0-15
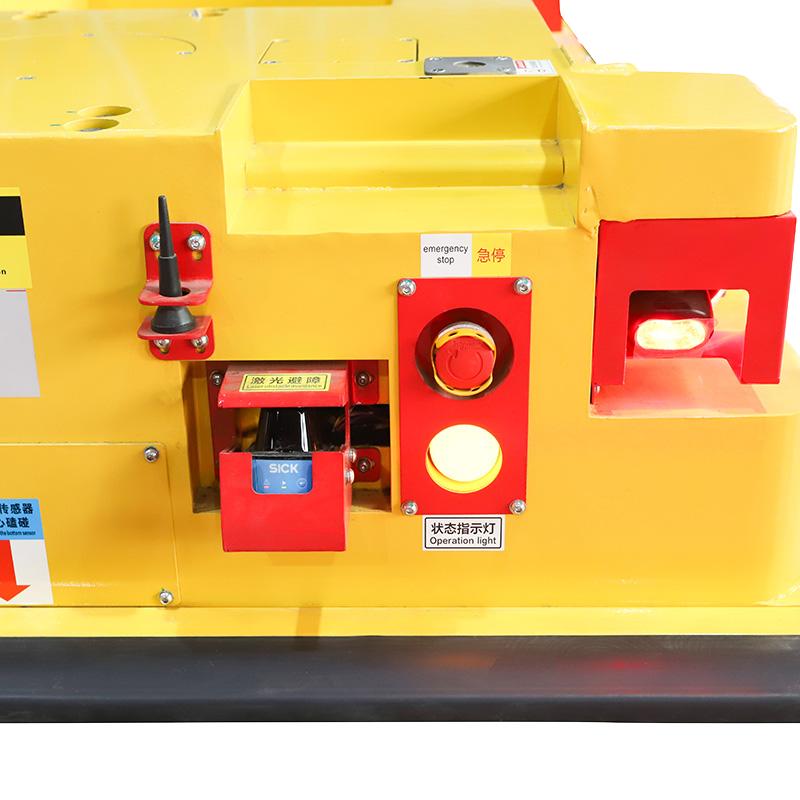
Ohutuskaitsmine: Laserhindamissensor + ohutuse piirjoone kosmine + heli ja valgus alarm + kiireloomulik peatamine nupp

Seotud tooted





Seotud teadmised
-
 Peamine transformatortöötab ja heleda gaasi toimimise probleemid1. Õnnetuse kirje (19. märts 2019)19. märtsil 2019 kell 16:13 teatas jälgimispaneel No. 3 peamise transformaatori heledast gaasi toimingust. Vastavalt Elektrijaama transformatortöölehe (DL/T572-2010) kontrollis hooldus- ja ülevaatajate (O&M) personal No. 3 peamise transformaatori kohalikku seisundit.Kohaliku kinnitusega: No. 3 peamise transformaatori WBH mitteelektriline kaitsepaneel teatas B-faasi heledast gaasi toimingust transformaatorikorpuses, taaskäivitamine oli ebatõhus. O&M perso02/05/2026
Peamine transformatortöötab ja heleda gaasi toimimise probleemid1. Õnnetuse kirje (19. märts 2019)19. märtsil 2019 kell 16:13 teatas jälgimispaneel No. 3 peamise transformaatori heledast gaasi toimingust. Vastavalt Elektrijaama transformatortöölehe (DL/T572-2010) kontrollis hooldus- ja ülevaatajate (O&M) personal No. 3 peamise transformaatori kohalikku seisundit.Kohaliku kinnitusega: No. 3 peamise transformaatori WBH mitteelektriline kaitsepaneel teatas B-faasi heledast gaasi toimingust transformaatorikorpuses, taaskäivitamine oli ebatõhus. O&M perso02/05/2026 -
 Vigade ja nende lahendamise käsitlemine ühefaasi maandamisel 10kV jaotusvooluisikesÜhefaasiline maandusvigade omadused ja tuvastusseadmed1. Ühefaasiliste maandusvigade omadusedKeskne häiresignaal:Hoiatuskell heliseb ja näitajalamp „Maandusvigade tekkimine [X] kV pingejaotussektsioonis [Y]“ süttib. Süsteemides, kus neutraalpunkt on Peterseni mähisega (kaarukustutusmähis) maandatud, süttib ka „Peterseni mähis töötab“ -näitaja.Isolatsioonijälgimise voltmeteri näidud:Vigase faasi pinge väheneb (osalise maandumise korral) või langeb nullini (tugeva maandumise korral).Teiste kahe fa01/30/2026
Vigade ja nende lahendamise käsitlemine ühefaasi maandamisel 10kV jaotusvooluisikesÜhefaasiline maandusvigade omadused ja tuvastusseadmed1. Ühefaasiliste maandusvigade omadusedKeskne häiresignaal:Hoiatuskell heliseb ja näitajalamp „Maandusvigade tekkimine [X] kV pingejaotussektsioonis [Y]“ süttib. Süsteemides, kus neutraalpunkt on Peterseni mähisega (kaarukustutusmähis) maandatud, süttib ka „Peterseni mähis töötab“ -näitaja.Isolatsioonijälgimise voltmeteri näidud:Vigase faasi pinge väheneb (osalise maandumise korral) või langeb nullini (tugeva maandumise korral).Teiste kahe fa01/30/2026 -
 Neutraalpunkti maandamise käitumismoodel 110kV~220kV võrkude transformatooride jaoks110kV~220kV võrgutransformatorite neutraalpunkti maandamise režiimide paigutamine peaks rahuldama transformaatorite neutraalpunktide tõestusnõudmisi ning püüdma samuti säilitada elektrijaama nulljärjestiku impedantsi peaaegu muutumatuks, tagades, et süsteemi igas lühikestikukohas nulljärjestiku üldine impedants ei oleks suurem kui kolm korda positiivjärjestiku üldist impedantsi.Uute ehitiste ja tehnoloogiliste ümberkorralduste puhul 220kV ja 110kV transformaatorite neutraalpunktide maandamisreži01/29/2026
Neutraalpunkti maandamise käitumismoodel 110kV~220kV võrkude transformatooride jaoks110kV~220kV võrgutransformatorite neutraalpunkti maandamise režiimide paigutamine peaks rahuldama transformaatorite neutraalpunktide tõestusnõudmisi ning püüdma samuti säilitada elektrijaama nulljärjestiku impedantsi peaaegu muutumatuks, tagades, et süsteemi igas lühikestikukohas nulljärjestiku üldine impedants ei oleks suurem kui kolm korda positiivjärjestiku üldist impedantsi.Uute ehitiste ja tehnoloogiliste ümberkorralduste puhul 220kV ja 110kV transformaatorite neutraalpunktide maandamisreži01/29/2026 -
 Miks ümberliitlased kasutavad kive kõrvene krikunud kividega?Miks ümblussüsteemid kasutavad kive, kivikarve, kõrvete ja mürakivi?Ümblussüsteemides, nagu elektri- ja jaotustransformatoorid, edasitulekulised jooned, pingetransformatoorid, voolutransformatoorid ning lülitlused, vajavad maandamist. Maandamise peale uurime nüüd sügavamalt, miks kivikarvad ja mürakivid on ümblussüsteemides levinud. Kuigi need näevad tavaliselt välja, mängivad need kivid olulist rolli ohutuse ja funktsionaalsuse seisukohalt.Ümblussüsteemi maandamise disainis, eriti kui kasutatak01/29/2026
Miks ümberliitlased kasutavad kive kõrvene krikunud kividega?Miks ümblussüsteemid kasutavad kive, kivikarve, kõrvete ja mürakivi?Ümblussüsteemides, nagu elektri- ja jaotustransformatoorid, edasitulekulised jooned, pingetransformatoorid, voolutransformatoorid ning lülitlused, vajavad maandamist. Maandamise peale uurime nüüd sügavamalt, miks kivikarvad ja mürakivid on ümblussüsteemides levinud. Kuigi need näevad tavaliselt välja, mängivad need kivid olulist rolli ohutuse ja funktsionaalsuse seisukohalt.Ümblussüsteemi maandamise disainis, eriti kui kasutatak01/29/2026 -
 Miks transformatoori tuuma tuleb maandada ainult ühe punkti kaudu Eikahjuks mitme punkti maandumine ei ole usaldusam?Miks transformaatori tuum peab olema maadetud?Töötamisel asuvad transformaatori tuum, sellel paigutatud metallstruktuurid, osad ja komponendid tugeva elektrivälja sees. Selle välja mõju all nad saavad suhteline kõrge potentiaal maapinna suhtes. Kui tuum ei ole maadetud, tekib tuuma ja maadetud kinnitusskeemide ning tanki vahel potentsiaalne erinevus, mis võib põhjustada ajutisi laengutusi.Lisaks on töötamisel tuuma ja erinevate metallstruktuuride, osade ja komponentide ümber tugev magnetväli. Ne01/29/2026
Miks transformatoori tuuma tuleb maandada ainult ühe punkti kaudu Eikahjuks mitme punkti maandumine ei ole usaldusam?Miks transformaatori tuum peab olema maadetud?Töötamisel asuvad transformaatori tuum, sellel paigutatud metallstruktuurid, osad ja komponendid tugeva elektrivälja sees. Selle välja mõju all nad saavad suhteline kõrge potentiaal maapinna suhtes. Kui tuum ei ole maadetud, tekib tuuma ja maadetud kinnitusskeemide ning tanki vahel potentsiaalne erinevus, mis võib põhjustada ajutisi laengutusi.Lisaks on töötamisel tuuma ja erinevate metallstruktuuride, osade ja komponentide ümber tugev magnetväli. Ne01/29/2026 -
 Transformeri neutraalne maandamineI. Mida on neutraalpunkt?Tehnikates ja geneeratorites on neutraalpunkt konkreetne koht vedelikus, kus see punkt ja igas välisliidese vaheline absoluutvoolu on võrdne. Allpool olevas joonisel tähistab punktOneutraalpunkti.II. Miks neutraalpunkt peab maanduma?Kolmefaasi VV elektrivõrgus neutraalpunkti ja maa vaheline elektriline ühendusmeetod nimetatakseneutraalmaandamismeetodiks. See maandamismeetod mõjutab otse:Elektrivõrgu turvalisust, usaldusväärsust ja majanduslikku tõhusust;Süsteemi seadmete01/29/2026
Transformeri neutraalne maandamineI. Mida on neutraalpunkt?Tehnikates ja geneeratorites on neutraalpunkt konkreetne koht vedelikus, kus see punkt ja igas välisliidese vaheline absoluutvoolu on võrdne. Allpool olevas joonisel tähistab punktOneutraalpunkti.II. Miks neutraalpunkt peab maanduma?Kolmefaasi VV elektrivõrgus neutraalpunkti ja maa vaheline elektriline ühendusmeetod nimetatakseneutraalmaandamismeetodiks. See maandamismeetod mõjutab otse:Elektrivõrgu turvalisust, usaldusväärsust ja majanduslikku tõhusust;Süsteemi seadmete01/29/2026
Seotud lahendused
-
 Integreeritud tuul-päikese ühendv toite lahendus eemarimatele saarteleÜlevaadeSee ettepanek esitab innovaatilise integreeritud energiaülesannet, mis süvasti kombineerib tuuleenergia, päikeseenergia, pompvee varustamise ja merevedeliku desalineerimise tehnoloogiad. See pürib süstemaatiliselt lahendada eemarimate saarte silmitsi olevaid ümberkujundusi, sealhulgas raske võrgukatta, dieselgeneraatorite kasutuselevõtu kõrgeid kulusid, traditsiooniliste akude piiranguid ja soodsa vee puudust. Lahendus saavutab sinergia ja iseseisvuse "energiavarustus - energiavarustus -10/17/2025
Integreeritud tuul-päikese ühendv toite lahendus eemarimatele saarteleÜlevaadeSee ettepanek esitab innovaatilise integreeritud energiaülesannet, mis süvasti kombineerib tuuleenergia, päikeseenergia, pompvee varustamise ja merevedeliku desalineerimise tehnoloogiad. See pürib süstemaatiliselt lahendada eemarimate saarte silmitsi olevaid ümberkujundusi, sealhulgas raske võrgukatta, dieselgeneraatorite kasutuselevõtu kõrgeid kulusid, traditsiooniliste akude piiranguid ja soodsa vee puudust. Lahendus saavutab sinergia ja iseseisvuse "energiavarustus - energiavarustus -10/17/2025 -
 Tarkvaraline tuule-päikese hübriidsüsteem fuzzy-PID juhtimisega parema akuhalduse ja MPPD tagamiseksÜlevaadeSee ettepanek esitab tuule-päikese hübriidsoojuse generaatorisüsteemi, mis põhineb tippne kontrolltehnoloogia, mille eesmärk on tõhusalt ja majanduslikult lahendada kaugel asuvate piirkondade ja eriliste rakendussenaariumide energiavajadusi. Selle süsteemi süda on tegevuses ATmega16 mikroprotsessori keskmes olev intelligentsed juhtimissüsteem. See süsteem teostab maksimaalset jõudluse punkti jälgimist (MPPT) nii tuule- kui ka päikeseenergia jaoks ning kasutab optimiseeritud algoritmi, mi10/17/2025
Tarkvaraline tuule-päikese hübriidsüsteem fuzzy-PID juhtimisega parema akuhalduse ja MPPD tagamiseksÜlevaadeSee ettepanek esitab tuule-päikese hübriidsoojuse generaatorisüsteemi, mis põhineb tippne kontrolltehnoloogia, mille eesmärk on tõhusalt ja majanduslikult lahendada kaugel asuvate piirkondade ja eriliste rakendussenaariumide energiavajadusi. Selle süsteemi süda on tegevuses ATmega16 mikroprotsessori keskmes olev intelligentsed juhtimissüsteem. See süsteem teostab maksimaalset jõudluse punkti jälgimist (MPPT) nii tuule- kui ka päikeseenergia jaoks ning kasutab optimiseeritud algoritmi, mi10/17/2025 -
 Kõrge Kvaliteediga Tuule-Päikese Hübriidlahendus: Buck-Boost Konverter & Tark Laadimine Vähendavad Süsteemi MaksumustÜlevaadeSee lahendus pakub innovaatilist kõrgejulgevusega tuule-päikese hübriidenergiatootmise süsteemi. Lahendus aitab lahendada olemasolevate tehnoloogiate põhiline puudujääk, näiteks madal energiakasutus, lühike aku eluiga ja nõrged süsteemide stabiilsus. Süsteem kasutab täisdigitaalselt juhitavaid buck-boost DC/DC konverteerijaid, ristlikku paralleeltehnoloogiat ja intelligentsit kolmestage laadimisalgoritmi. See võimaldab maksimaalse energia punkti jälgimist (MPPT) laia valikutu tuulekiiru10/17/2025
Kõrge Kvaliteediga Tuule-Päikese Hübriidlahendus: Buck-Boost Konverter & Tark Laadimine Vähendavad Süsteemi MaksumustÜlevaadeSee lahendus pakub innovaatilist kõrgejulgevusega tuule-päikese hübriidenergiatootmise süsteemi. Lahendus aitab lahendada olemasolevate tehnoloogiate põhiline puudujääk, näiteks madal energiakasutus, lühike aku eluiga ja nõrged süsteemide stabiilsus. Süsteem kasutab täisdigitaalselt juhitavaid buck-boost DC/DC konverteerijaid, ristlikku paralleeltehnoloogiat ja intelligentsit kolmestage laadimisalgoritmi. See võimaldab maksimaalse energia punkti jälgimist (MPPT) laia valikutu tuulekiiru10/17/2025






