12tonnis Pesnus AGV



Attributa principalia
| Marca | Wone Store |
| Numerus Modeli | 12tonnis Pesnus AGV |
| carga nominal | 12 ton |
| Series | LY-AK-12T |
Descriptiones productorum a fornitori
Modus suspensionis AGV: spiralis, hydraulica
Celeritas AGV: Celeritas AGV interioris est 0-60m/min. Si celerior, pendet ab rebus actualibus. Tamen, considerando condicionem loci in generalibus praeficiis productivis, securitatem personarum, et ponderis oneris quando AGV operatur, commendatur ut celeritas non superet 30m/min. (20m/min pro vehiculis ultraexilibus standard in industria transformatorum) Maximum praescriptum celeritatis vehiculorum exteriorum est 5-10Km/H, et maximum vehiculorum portualium 36Km/H. Equipatum cum dispositivo transmissionis continua.
Capacitas bateriae: Communiter usatae sunt a 50-1000AH (ampere-hora), quae computatur ex potencia motricis/diametro rotae/montu ascensu/maximum celeritate/tempore tolerantiae (vacuum ad plenum redire/plenum onus). Nunc, communis AGV 100 tonnus habet capacitem bateriae 96V300AH pro 4 horis vacuae et plenae.
Systema potentiae Langyu: systema purae electricitatis, utendo bateriis ferrophosphatis lithii sine cura automobilari gradus pro emissione potentiae
Temperatura operationis bateriae: normae communes recommendant temperaturas operationis bateriae -20° ad 45° et extrema -40° ad 65° (equipatum cum dispositivo auto-calorifico vel aeris conditionato). Temperatura caricationis supra 0 grados.
Modus caricationis: manualis caricatio vel automatica (cum AGV automatica detegit se inferius valorem praescriptum, perget ad dispositivum caricationis pro caricatione automatica), caricatio automatica includit suppeditationem potentiae absque contactu, experimentalem caricationem, et caricationem inferior.
Principales modi navigationis AGV sunt:
1. Navigatio magnetica striata
Similis ad directionem electromagneticam, utitur fascia magnetica in superficie viae vice metallorum subterraneorum, et perficit directionem per signa inductionis magneticas. Habet meliorem flexibilitatem, facilius mutare vel expandere viam, et fascia magnetica simpliciter et facile ponitur, sed hanc rationem directionis facile perturbat materiae metallicae circum circuitum, et fascia magnetica facile laeditur a machinis, ita fides directionis multum afficitur ab externo.
2. Navigatio laser SLAM
Direxitio laser consistit in instaurandis reflectoribus laser precise positionatis circa viam cursus AGV. AGV emittit raios laser per scannerem laser et colligit raios laser reflectos a reflectoribus ad determinandum suum praesentem locum et directum, et dirigit AGV per continuas operationes geometricas triangulares. Maximum beneficium huius technologiae est quod AGV potest accurate locari; non necesse est alia praeparativa locationis in terra; via cursus potest esse flexibilis et adaptabilis ad varias conditiones loci. Hoc est nunc praefertum methodus directionis ab multis extraneis fabricis AGV; inconvenientia est quod costus fabricandi altus, exigentia ambientis comparativus durus (lumen externum, exigentia terrae, visibilitas, etc.), et non aptus ad usum exterius (maxime susceptibilis imbris, nivis, et nebulae).
3. Navigatio GNSS-GPS/Beidou.
Parametri basales
Typus AGV: Elevatio post-carga
Onus praescriptum KG: 12000 KG
Pondera vehiculi: 3000 KG
Modus propulsionis: Differentialis
Directio motus: Recta anteriore et posteriore, dextra et sinistra, rotatio in situ
Modus navigationis: Striata magnetica
Dimensiones corporis (longitudo, latitudo et altitudo) mm: 3400x1200x440
Spatium inter chassis et terrain mm: 35
Scenarium usus: Interior
Accuratia positionis mm: ±10mm
Accuratia navigationis mm: ±10mm
Celeritas cursus vacuum/plenum: 0-15
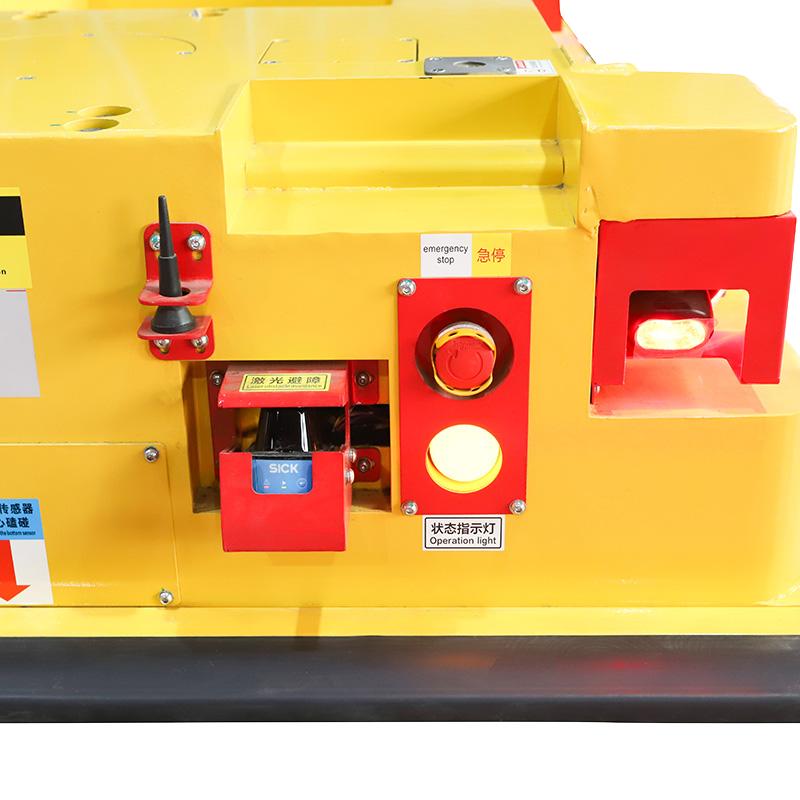
Protectio securitatis: Sensor evitandi obstacula laser + tactus marginis securitatis + alerta soni et luminis + clavis stop emergentis

Producta Connexa





Cognitio Connexa
-
 Accidentia Transformatoris Principalis et Questiones Operationis Gas Luminis1. Registri accidentis (XIX Martii, MMXIX)Hora XVI:XIIX die XIX Martii, MMXIX, monitorium background reportavit actionem gas levis transformatoris principis numeri III. Conformiter Codex Operationis Transformatorum Electricitatis (DL/T572-2010), personale operationis et maintenance (O&M) inspectavit statum in situ transformatoris principis numeri III.Confirmatio in situ: Panel non-electricus protectionis WBH transformatoris principis numeri III reportavit actionem gas levis phase B corpus tr02/05/2026
Accidentia Transformatoris Principalis et Questiones Operationis Gas Luminis1. Registri accidentis (XIX Martii, MMXIX)Hora XVI:XIIX die XIX Martii, MMXIX, monitorium background reportavit actionem gas levis transformatoris principis numeri III. Conformiter Codex Operationis Transformatorum Electricitatis (DL/T572-2010), personale operationis et maintenance (O&M) inspectavit statum in situ transformatoris principis numeri III.Confirmatio in situ: Panel non-electricus protectionis WBH transformatoris principis numeri III reportavit actionem gas levis phase B corpus tr02/05/2026 -
 Culpae et Tractatio Terrae Unipolaris in Lineis Distributionis 10kVCharacteristica et Instrumenta Detegendi Defectus Terrae Monofasiales1. Characteristica Defectuum Terrae MonofasialiumSigna Centralia Admonitionis:Campanula admonitionis sonat, et lucerna indicativa inscripta „Defectus Terrae in Sectione Omnibus [X] kV [Y]“ accenditur. In systematibus ubi punctum neutrum per bobinam Petersen (bobinam suppressionis arcus) ad terram connectitur, lucerna indicativa „Bobina Petersen Operatur“ etiam accenditur.Indicationes Voltmetri Monitoris Isolationis:Tensio phase01/30/2026
Culpae et Tractatio Terrae Unipolaris in Lineis Distributionis 10kVCharacteristica et Instrumenta Detegendi Defectus Terrae Monofasiales1. Characteristica Defectuum Terrae MonofasialiumSigna Centralia Admonitionis:Campanula admonitionis sonat, et lucerna indicativa inscripta „Defectus Terrae in Sectione Omnibus [X] kV [Y]“ accenditur. In systematibus ubi punctum neutrum per bobinam Petersen (bobinam suppressionis arcus) ad terram connectitur, lucerna indicativa „Bobina Petersen Operatur“ etiam accenditur.Indicationes Voltmetri Monitoris Isolationis:Tensio phase01/30/2026 -
 Modus operationis terre iunctae puncti neutralis pro transformatoribus retis electricitatis 110kV~220kVDispositio modi operis terrae puncti neutralis pro transformatoribus rete electricitatis 110kV~220kV debet exigentias tolerationis insulationis puncti neutralis transformatorum complere, et simul conari ut impedimentum sequentiae nullae stationum transformationis fere immutatum maneat, dum certatur ne impedimentum sequentiae nullae compositum in quocumque puncto raptus circuiti systematis ultra ter impedimentum sequentiae positivae compositum excedat.Pro transformatoribus 220kV et 110kV in novis01/29/2026
Modus operationis terre iunctae puncti neutralis pro transformatoribus retis electricitatis 110kV~220kVDispositio modi operis terrae puncti neutralis pro transformatoribus rete electricitatis 110kV~220kV debet exigentias tolerationis insulationis puncti neutralis transformatorum complere, et simul conari ut impedimentum sequentiae nullae stationum transformationis fere immutatum maneat, dum certatur ne impedimentum sequentiae nullae compositum in quocumque puncto raptus circuiti systematis ultra ter impedimentum sequentiae positivae compositum excedat.Pro transformatoribus 220kV et 110kV in novis01/29/2026 -
 Cur Quare Substationes Lapidem Gravem Calculos et Rupem Fractam UtunturCur Quare Substationes Utuntur Lapidibus, Gravibus, Piscinis et Saxis Tritis?In stationibus transformationis, instrumenta ut transformatores electricitatis et distributionis, lineae transmissionis, transformatores tensionis, transformatores currentis et commutatores disiunctionis omnia terram exigunt. Praeter terram, nunc profundius explorabimus cur gravia et saxa trita in stationibus transformationis saepe utuntur. Quamquam videantur ordinaria, isti lapides partem criticam iuxtaque functionalem01/29/2026
Cur Quare Substationes Lapidem Gravem Calculos et Rupem Fractam UtunturCur Quare Substationes Utuntur Lapidibus, Gravibus, Piscinis et Saxis Tritis?In stationibus transformationis, instrumenta ut transformatores electricitatis et distributionis, lineae transmissionis, transformatores tensionis, transformatores currentis et commutatores disiunctionis omnia terram exigunt. Praeter terram, nunc profundius explorabimus cur gravia et saxa trita in stationibus transformationis saepe utuntur. Quamquam videantur ordinaria, isti lapides partem criticam iuxtaque functionalem01/29/2026 -
 Cur autem nucleus transformatoris tantum in uno puncto terram tangere debet Nonne terra multipuncta fidelius estCur ergo nucleus transformatoris terram tangere debet?In operatione, nucleus transformatoris, simul cum structuris, partibus et componentibus metallicis quae fixant nucleum et spiras, in forti campo electrico situs est. Sub influentia huius campi electrici, potentialem relativum altum ad terram comparatum acquirunt. Si nucleus non terra tangitur, differentia potentialis inter nucleum et structuras claudicantes et vas terratum existet, quae possit ad intermitterentiam dismissionem ducere.Praetere01/29/2026
Cur autem nucleus transformatoris tantum in uno puncto terram tangere debet Nonne terra multipuncta fidelius estCur ergo nucleus transformatoris terram tangere debet?In operatione, nucleus transformatoris, simul cum structuris, partibus et componentibus metallicis quae fixant nucleum et spiras, in forti campo electrico situs est. Sub influentia huius campi electrici, potentialem relativum altum ad terram comparatum acquirunt. Si nucleus non terra tangitur, differentia potentialis inter nucleum et structuras claudicantes et vas terratum existet, quae possit ad intermitterentiam dismissionem ducere.Praetere01/29/2026 -
 Intellegere Terram Neutralis TransformatorisI. Quid est Punctum Neutrum?In transformatoribus et generatoribus, punctum neutrum est locus specificus in spira ubi absoluta tensio inter hunc locum et singula terminalia externa aequalis est. In diagrammate infra, punctumOrepraesentat punctum neutrum.II. Cur Punctum Neutrum Terrendum Est?Modus connexionis electricae inter punctum neutrum et terram in systemate AC triphasico diciturmodus terrendi puncti neutri. Hic modus directe afficit:Securitatem, fidem et oeconomiciam retelectrici;Selectione01/29/2026
Intellegere Terram Neutralis TransformatorisI. Quid est Punctum Neutrum?In transformatoribus et generatoribus, punctum neutrum est locus specificus in spira ubi absoluta tensio inter hunc locum et singula terminalia externa aequalis est. In diagrammate infra, punctumOrepraesentat punctum neutrum.II. Cur Punctum Neutrum Terrendum Est?Modus connexionis electricae inter punctum neutrum et terram in systemate AC triphasico diciturmodus terrendi puncti neutri. Hic modus directe afficit:Securitatem, fidem et oeconomiciam retelectrici;Selectione01/29/2026
Solutiones Relatae
-
 Integrata Solutio Potentiae Mixtae Ventus-Solaris pro Insulis RemoteAbstractusHoc propositum praebet solutionem integratam energetica innovativam, quae profunde combinet generationem venti, photovoltaicam, accumulationem hydroelectricam et desalinizationem marina. Id intendit systematica adflictiones corde insularum remotarum solvere, inter quas difficultates coperturae rete, costus alti generationis diesel, limitationes accumulationis battery traditionalis et raritas fontium aquarum dulcium. Haec solutio synergiarum et autonomiae in "supply power - energy stora10/17/2025
Integrata Solutio Potentiae Mixtae Ventus-Solaris pro Insulis RemoteAbstractusHoc propositum praebet solutionem integratam energetica innovativam, quae profunde combinet generationem venti, photovoltaicam, accumulationem hydroelectricam et desalinizationem marina. Id intendit systematica adflictiones corde insularum remotarum solvere, inter quas difficultates coperturae rete, costus alti generationis diesel, limitationes accumulationis battery traditionalis et raritas fontium aquarum dulcium. Haec solutio synergiarum et autonomiae in "supply power - energy stora10/17/2025 -
 Systema Hybridum Ventus-Solar cum Controllo Fuzzy-PID pro BATTERIAE GESTIONE ENHANCED et MPPTAbstractusHoc propositum systema generationis electricitatis mixtum venti-solaris praebet, quod superiore technologia controlis innititur, ad efficaciter et oeconomico satisfaciendum indigentiis electricitatis regionibus remotis et scenariis applicationis specialibus. Nucleus huius systematis in systemate intelligenti controlis centrat, quod circa microprocessorem ATmega16 constat. Hoc systema Maximum Power Point Tracking (MPPT) tam venti quam solaris perficit et algorithmo optimato, qui combini10/17/2025
Systema Hybridum Ventus-Solar cum Controllo Fuzzy-PID pro BATTERIAE GESTIONE ENHANCED et MPPTAbstractusHoc propositum systema generationis electricitatis mixtum venti-solaris praebet, quod superiore technologia controlis innititur, ad efficaciter et oeconomico satisfaciendum indigentiis electricitatis regionibus remotis et scenariis applicationis specialibus. Nucleus huius systematis in systemate intelligenti controlis centrat, quod circa microprocessorem ATmega16 constat. Hoc systema Maximum Power Point Tracking (MPPT) tam venti quam solaris perficit et algorithmo optimato, qui combini10/17/2025 -
 Solutio Mixta Venti-Solis Costo-Effectivus: Convertor Buck-Boost et Caricatio Intelligens Reducunt Costum SystematisAbstractHoc solutio novum systema generationis potestatis venti-solaris altae efficientiae proponit. Ad corrigendum defectus in technologiis existentibus, sicut usus parvus energiae, brevis vita bateriarum, et infirma stabilitas systematis, hoc systema convertes DC/DC buck-boost digitaliter plene controlatos, technologiam parallelam interlaced, et algorithmum intelligentem tristagium caricationis adhibet. Hoc permittit Maximum Power Point Tracking (MPPT) in latiore ambitu velocitatum venti et ir10/17/2025
Solutio Mixta Venti-Solis Costo-Effectivus: Convertor Buck-Boost et Caricatio Intelligens Reducunt Costum SystematisAbstractHoc solutio novum systema generationis potestatis venti-solaris altae efficientiae proponit. Ad corrigendum defectus in technologiis existentibus, sicut usus parvus energiae, brevis vita bateriarum, et infirma stabilitas systematis, hoc systema convertes DC/DC buck-boost digitaliter plene controlatos, technologiam parallelam interlaced, et algorithmum intelligentem tristagium caricationis adhibet. Hoc permittit Maximum Power Point Tracking (MPPT) in latiore ambitu velocitatum venti et ir10/17/2025






