12 ton Ağırlıklı AGV



Ana Özellikler
| Marka | Wone Store |
| Model Numarası | 12 ton Ağırlıklı AGV |
| Nominal Yük Kapasitesi | 12 ton |
| Seri | LY-AK-12T |
Tedarikçi tarafından sağlanan ürün açıklamaları
AGV süspansiyon yöntemi: yay, hidrolik
AGV sürüş hızı: İç mekan AGV'nin hızı 0-60m/dk. Eğer hız daha yüksekse, bu durum gerçekçi koşullara bağlıdır. Ancak genel üretim işletmelerinin saha ortamını, personelin güvenliğini ve AGV'nin çalışırken taşıdığı yükün ağırlığını düşünerek, hızın 30m/dk'yi aşmaması önerilir. (Dönüşüm endüstrisindeki ultra ince standart araçlar için 20m/dk) Dış mekan araçlarının maksimum hız ayarı 5-10Km/sa, liman araçları için ise 36Km/sa'dır. Sürekli değişken vitese sahip.
Pil kapasitesi: Genellikle kullanılanlar 50-1000AH (amper-saat) arasındadır, bu değer motor gücü/tekerlek çapı/yokuş çıkarma/maksimum hız/dayanma süresi (boş dolu dönüş/dolu yük) gibi veriler üzerine hesaplanır. Şu anda yaygın olarak kullanılan 100 tonluk AGV'nin pil kapasitesi 4 saat boş ve dolu yük için 96V300AH'dır.
Langyu güç sistemi: saf elektrikli sistem, otomotiv sınıfı bakım gerektirmeyen lityum demir fosfat pilleri kullanarak güç sağlar
Pil çalışma sıcaklığı: normal standartlar pil çalışma sıcaklığını -20° ile 45° arasında önerir ve aşırı sıcaklıklarda -40° ile 65° (kendi kendine ısıtma cihazı veya klima ile donatılmış). Şarj sıcaklığı 0 derecenin üzerinde olmalıdır.
Şarj yöntemi: manuel şarj veya otomatik şarj (AGV'nin otomatik olarak belirlenen değerin altında olduğunu tespit ettiğinde, otomatik olarak şarj cihazına gider ve kendini şarj eder), otomatik şarj kontaktsız güç sağlama, test şarjı ve alt şarjı içerir.
AGV navigasyon yöntemleri şunları içerir:
1. Manyetik şerit navigasyonu
Elektromanyetik rehberlemeye benzer şekilde, yer altına metal tel yerine yol yüzeyine manyetik bant kullanılarak, manyetik indüksiyon sinyalleri aracılığıyla rehberleme sağlanır. Bu yöntem daha esnek olup, yolu değiştirmek ya da genişletmek daha kolaydır, manyetik bant basit ve kolay bir şekilde serilebilir, ancak bu rehberleme yöntemi çevredeki metaller tarafından kolayca etkilenebilir ve makinalar tarafından manyetik bant zarar görebilir, bu nedenle rehberlemenin güvenilirliği dış faktörlere büyük ölçüde bağlıdır.
2. Laser SLAM Navigasyonu
Laser rehberlemesi, AGV'nin sürüş yolunun etrafına hassas konumlandırılmış laser yansıtırıcılar kurulmasını içerir. AGV, bir lazer tarayıcı aracılığıyla lazer ışınları gönderir ve yansıtırıcıların geri yansıttığı lazer ışınlarını toplayarak şu anki konumunu ve yönünü belirler, sürekli üçgen geometri hesaplamalarıyla AGV'yi yönlendirir. Bu teknolojinin en büyük avantajı, AGV'nin kesin bir şekilde konumlandırılabilmesidir; zemine başka bir konumlandırma tesisatına ihtiyaç duyulmaz; sürüş yolu çok çeşitli saha ortamlarına uygun olarak esnek olabilir. Bu, şu anda birçok yabancı AGV üreticisi tarafından tercih edilen ileri seviye rehberleme yöntemidir; dezavantajı ise üretim maliyetinin yüksek olması, çevre koşullarının oldukça sıkıntılı olması (dış ışık, zemin gereklilikleri, görünürlük gereklilikleri vb.) ve dış ortamda kullanımı (özellikle yağmur, kar ve sis gibi hava koşullarına karşı hassas olması).
3. GNSS-GPS/Beidou navigasyonu.
Temel parametreler
AGV tipi: Geri yükleme kaldırma
Nominal yük KG: 12000 KG
Araç ağırlığı: 3000 KG
Sürüş şekli: Türevsel
Hareket yönü: Doğru ileri ve geri, sol ve sağ, yerinde dönme
Navigasyon yöntemi: Manyetik şerit
Gövde boyutları (uzunluk, genişlik ve yükseklik) mm: 3400x1200x440
Şasi zemin açıklığı mm: 35
Kullanım senaryosu: İç mekan
Konumlandırma doğruluğu mm: ±10mm
Navigasyon doğruluğu mm: ±10mm
Boş/dolu yük sürüş hızı: 0-15
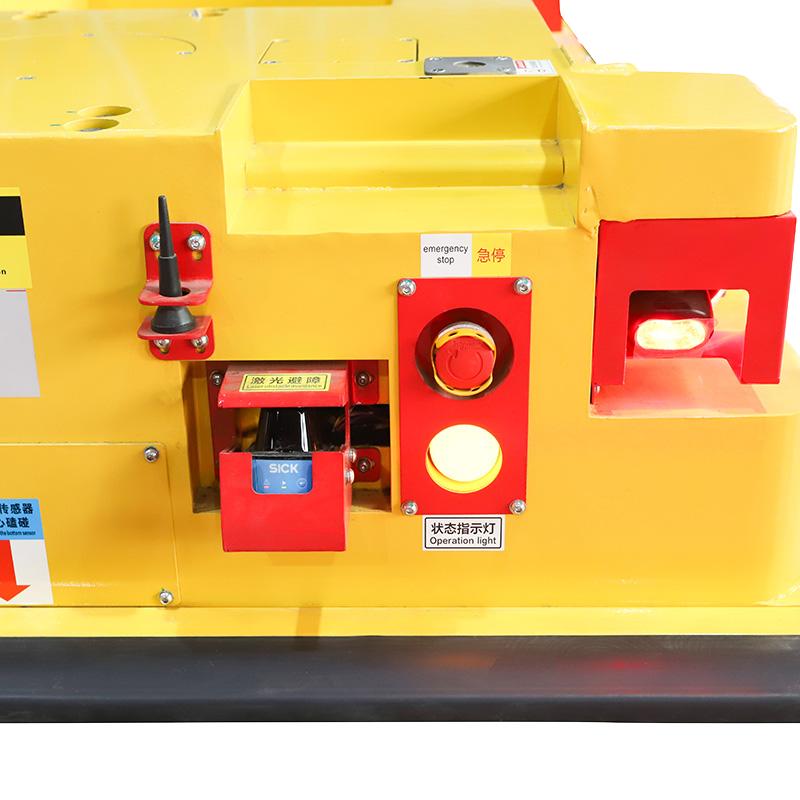
Güvenlik koruması: Lazer engel önleyici sensörü + güvenlik kenar dokunuşu + ses ve ışık alarmı + acil durdurma düğmesi

İlgili Ürünler





İlgili Bilgiler
-
 Ana Dönüşüm Trafosu Kazaları ve Hafif Gaz İşlevi Sorunları1. Kazı Kaydı (19 Mart 2019)19 Mart 2019 tarihinde saat 16:13'te, izleme arka planı No. 3 ana transformatörde hafif gaz eylemi bildirdi. Elektrik Transformatörleri İşletme Kılavuzu (DL/T572-2010) gereğince, işletme ve bakım (O&M) personeli No. 3 ana transformatörün mevcut durumunu inceledi.Mekan doğrulaması: No. 3 ana transformatörün WBH elektriksiz koruma paneli, transformatör gövdesinin Faz B'de hafif gaz eylemi olduğunu bildirdi ve sıfırlama etkisiz kaldı. O&M personeli No. 3 ana tran02/05/2026
Ana Dönüşüm Trafosu Kazaları ve Hafif Gaz İşlevi Sorunları1. Kazı Kaydı (19 Mart 2019)19 Mart 2019 tarihinde saat 16:13'te, izleme arka planı No. 3 ana transformatörde hafif gaz eylemi bildirdi. Elektrik Transformatörleri İşletme Kılavuzu (DL/T572-2010) gereğince, işletme ve bakım (O&M) personeli No. 3 ana transformatörün mevcut durumunu inceledi.Mekan doğrulaması: No. 3 ana transformatörün WBH elektriksiz koruma paneli, transformatör gövdesinin Faz B'de hafif gaz eylemi olduğunu bildirdi ve sıfırlama etkisiz kaldı. O&M personeli No. 3 ana tran02/05/2026 -
 10kV Dağıtım Hatlarında Tek Fazlı Yerleşik Arızalar ve Bunların Ele alınmasıTekli Faz Toplamak Hatalarının Özellikleri ve Tespit Cihazları1. Tekli Faz Toplamak Hatalarının ÖzellikleriMerkezi Alarm Sinyalleri:Uyarı zili çalar ve “[X] kV Ana Hat Bölümü [Y]'de Toplamak Hatası” etiketli gösterge lambası yanar. Petersen bobini (yay kapatma bobini) ile nötr nokta toplamak edilmiş sistemlerde, “Petersen Bobini Çalışıyor” göstergesi de yanar.İzolasyon İzleme Voltmetresi Gösterimleri:Hatalı fazın gerilimi azalır (eksik toplamak durumunda) veya sıfıra düşe01/30/2026
10kV Dağıtım Hatlarında Tek Fazlı Yerleşik Arızalar ve Bunların Ele alınmasıTekli Faz Toplamak Hatalarının Özellikleri ve Tespit Cihazları1. Tekli Faz Toplamak Hatalarının ÖzellikleriMerkezi Alarm Sinyalleri:Uyarı zili çalar ve “[X] kV Ana Hat Bölümü [Y]'de Toplamak Hatası” etiketli gösterge lambası yanar. Petersen bobini (yay kapatma bobini) ile nötr nokta toplamak edilmiş sistemlerde, “Petersen Bobini Çalışıyor” göstergesi de yanar.İzolasyon İzleme Voltmetresi Gösterimleri:Hatalı fazın gerilimi azalır (eksik toplamak durumunda) veya sıfıra düşe01/30/2026 -
 110kV~220kV elektrik şebekesi transformatörleri için nötr nokta yerleştirme çalışma modu110kV~220kV elektrik şebekelerindeki dönüştürücülerin nötr nokta yerleştirme modları, dönüştürücülerin nötr noktalarının yalıtım dayanıklılık gereksinimlerini karşılamalı ve aynı zamanda alt istasyonların sıfır-dizili dirençlerinin temel olarak değişmemesi hedeflenmelidir. Ayrıca, sistemin herhangi bir kısa devre noktasındaki sıfır-dizili toplam direnç, pozitif-dizili toplam dirençin üç katını aşmamalıdır.Yeni inşaat ve teknik yenileme projelerindeki 220kV ve 110kV dönüştürücülerin nötr nokta ye01/29/2026
110kV~220kV elektrik şebekesi transformatörleri için nötr nokta yerleştirme çalışma modu110kV~220kV elektrik şebekelerindeki dönüştürücülerin nötr nokta yerleştirme modları, dönüştürücülerin nötr noktalarının yalıtım dayanıklılık gereksinimlerini karşılamalı ve aynı zamanda alt istasyonların sıfır-dizili dirençlerinin temel olarak değişmemesi hedeflenmelidir. Ayrıca, sistemin herhangi bir kısa devre noktasındaki sıfır-dizili toplam direnç, pozitif-dizili toplam dirençin üç katını aşmamalıdır.Yeni inşaat ve teknik yenileme projelerindeki 220kV ve 110kV dönüştürücülerin nötr nokta ye01/29/2026 -
 Neden Trafo Merkezleri Taş Kırık Taş Çakıl ve Gravel KullanırNeden Trafo Merkezleri Taş, Çakıl, Kırık Taş ve Basalt Kırıntısı Kullanır?Trafo merkezlerinde, güç ve dağıtım dönüştürücüler, iletim hatları, gerilim dönüştürücüler, akım dönüştürücüler ve ayrılma anahtarları gibi ekipmanların hepsi bir arazeye bağlanmalıdır. Bağlantı ötesinde, şimdi çakıl ve kırık taşın trafo merkezlerinde yaygın olarak neden kullanıldığını derinlemesine inceleyeceğiz. Bu taşlar sıradan görünse de, kritik bir güvenlik ve işlevsel rol oynarlar.Trafo merkezi bağlantı tasarımı sır01/29/2026
Neden Trafo Merkezleri Taş Kırık Taş Çakıl ve Gravel KullanırNeden Trafo Merkezleri Taş, Çakıl, Kırık Taş ve Basalt Kırıntısı Kullanır?Trafo merkezlerinde, güç ve dağıtım dönüştürücüler, iletim hatları, gerilim dönüştürücüler, akım dönüştürücüler ve ayrılma anahtarları gibi ekipmanların hepsi bir arazeye bağlanmalıdır. Bağlantı ötesinde, şimdi çakıl ve kırık taşın trafo merkezlerinde yaygın olarak neden kullanıldığını derinlemesine inceleyeceğiz. Bu taşlar sıradan görünse de, kritik bir güvenlik ve işlevsel rol oynarlar.Trafo merkezi bağlantı tasarımı sır01/29/2026 -
 Neden Bir Tranformatör Çekirdeği Sadece Bir Noktadan Yerleşmelidir? Çok Noktalı Yerleşim Daha Güvenilir Değil mi?Neden Trafo Çekirdeği Yerleşik Olmalıdır?İşlem sırasında, trafo çekirdeği ile çekirdeği ve sarımları sabitleyen metal yapılar, parçalar ve bileşenler güçlü bir elektrik alanında bulunur. Bu elektrik alanının etkisi altında, bu parçalar zemine göre nispeten yüksek bir potansiyele sahip olurlar. Eğer çekirdek yerleştirilmezse, çekirdek ile yerleştirilmiş sıkıştırma yapıları ve tank arasında potansiyel fark oluşabilir, bu da ara sıra devre dışı kalmasına neden olabilir.Bunun yanı sıra, işlem sırası01/29/2026
Neden Bir Tranformatör Çekirdeği Sadece Bir Noktadan Yerleşmelidir? Çok Noktalı Yerleşim Daha Güvenilir Değil mi?Neden Trafo Çekirdeği Yerleşik Olmalıdır?İşlem sırasında, trafo çekirdeği ile çekirdeği ve sarımları sabitleyen metal yapılar, parçalar ve bileşenler güçlü bir elektrik alanında bulunur. Bu elektrik alanının etkisi altında, bu parçalar zemine göre nispeten yüksek bir potansiyele sahip olurlar. Eğer çekirdek yerleştirilmezse, çekirdek ile yerleştirilmiş sıkıştırma yapıları ve tank arasında potansiyel fark oluşabilir, bu da ara sıra devre dışı kalmasına neden olabilir.Bunun yanı sıra, işlem sırası01/29/2026 -
 Trasformatör Nötr Bağlantısını AnlamaI. Nötr Nokta Nedir?Dönüşümçüler ve jeneratörlerde, nötr nokta, bu nokta ile her dış terminal arasındaki mutlak gerilimin eşit olduğu belirli bir bobin noktasıdır. Aşağıdaki diyagramda, noktaOnötr noktayı temsil etmektedir.II. Neden Nötr Noktanın Topraklanması Gerekir?Üç fazlı AC güç sistemlerinde nötr nokta ile toprak arasındaki elektriksel bağlantı yönteminenötr topraklama yöntemidenir. Bu toplama yöntemi doğrudan etkiler:Güç ağının güvenliği, güvenilirliği ve ekonomisi;Sistem ekipmanları için01/29/2026
Trasformatör Nötr Bağlantısını AnlamaI. Nötr Nokta Nedir?Dönüşümçüler ve jeneratörlerde, nötr nokta, bu nokta ile her dış terminal arasındaki mutlak gerilimin eşit olduğu belirli bir bobin noktasıdır. Aşağıdaki diyagramda, noktaOnötr noktayı temsil etmektedir.II. Neden Nötr Noktanın Topraklanması Gerekir?Üç fazlı AC güç sistemlerinde nötr nokta ile toprak arasındaki elektriksel bağlantı yönteminenötr topraklama yöntemidenir. Bu toplama yöntemi doğrudan etkiler:Güç ağının güvenliği, güvenilirliği ve ekonomisi;Sistem ekipmanları için01/29/2026
İlgili Çözümler
-
 Entegre Rüzgar-Güneş Hibrit Güç Çözümü Uzak Adalar İçinÖzetBu öneri, rüzgar enerjisi, güneş fotovoltaik enerji üretimi, pompalı hidro depolama ve deniz suyu tuzlama teknolojilerini derinlemesine birleştiren yenilikçi entegre enerji çözümünü sunmaktadır. Uzak adaların karşılaştığı temel zorlukları sistematik olarak ele almayı amaçlamaktadır; bu zorluklar arasında ağ kapatımı zorluğu, dizel enerji üretiminin yüksek maliyeti, geleneksel pillerin sınırlamaları ve tatlı su kaynaklarının azlığı bulunmaktadır. Çözüm, "enerji sağlayıcı - enerji depolama - s10/17/2025
Entegre Rüzgar-Güneş Hibrit Güç Çözümü Uzak Adalar İçinÖzetBu öneri, rüzgar enerjisi, güneş fotovoltaik enerji üretimi, pompalı hidro depolama ve deniz suyu tuzlama teknolojilerini derinlemesine birleştiren yenilikçi entegre enerji çözümünü sunmaktadır. Uzak adaların karşılaştığı temel zorlukları sistematik olarak ele almayı amaçlamaktadır; bu zorluklar arasında ağ kapatımı zorluğu, dizel enerji üretiminin yüksek maliyeti, geleneksel pillerin sınırlamaları ve tatlı su kaynaklarının azlığı bulunmaktadır. Çözüm, "enerji sağlayıcı - enerji depolama - s10/17/2025 -
 Akıllı Rüzgar-Güneş Hibrit Sistemi Fuzzy-PID Kontrolü ile Geliştirilmiş Pil Yönetimi ve MPPT içinÖzetBu teklif, gelişmiş kontrol teknolojisi temelinde bir rüzgar-güneş hibrit enerji üretim sistemi sunmaktadır ve uzak bölgelerde ve özel uygulama senaryolarında güç ihtiyaçlarını etkili ve ekonomik bir şekilde karşılamayı amaçlamaktadır. Sistemin çekirdeği, ATmega16 mikroişlemcine dayalı bir akıllı kontrol sistemidir. Bu sistem, hem rüzgar hem de güneş enerjisi için Maksimum Güç Noktası Takibini (MPPT) gerçekleştirir ve pilin kilit bileşeni olan pilin hassas ve etkin şarj/boşaltma yönetimini P10/17/2025
Akıllı Rüzgar-Güneş Hibrit Sistemi Fuzzy-PID Kontrolü ile Geliştirilmiş Pil Yönetimi ve MPPT içinÖzetBu teklif, gelişmiş kontrol teknolojisi temelinde bir rüzgar-güneş hibrit enerji üretim sistemi sunmaktadır ve uzak bölgelerde ve özel uygulama senaryolarında güç ihtiyaçlarını etkili ve ekonomik bir şekilde karşılamayı amaçlamaktadır. Sistemin çekirdeği, ATmega16 mikroişlemcine dayalı bir akıllı kontrol sistemidir. Bu sistem, hem rüzgar hem de güneş enerjisi için Maksimum Güç Noktası Takibini (MPPT) gerçekleştirir ve pilin kilit bileşeni olan pilin hassas ve etkin şarj/boşaltma yönetimini P10/17/2025 -
 Maliyet Etkin Rüzgar-Güneş Hibrit Çözümü: Buck-Boost Konvertör & Akıllı Şarj Sistem Maliyetini AzaltırÖzetBu çözüm, yenilikçi bir yüksek verimli rüzgar-güneş hibrit enerji üretim sistemi önermektedir. Mevcut teknolojilerin temel zayıflıklarını - düşük enerji kullanımı, kısa pil ömrü ve zayıf sistem istikrarı gibi sorunları ele alarak, sistem tamamen dijital olarak kontrol edilen buck-boost DC/DC dönüştürücüler, ara sıra paralel teknoloji ve akıllı üç aşamalı şarj algoritması kullanmaktadır. Bu, daha geniş bir rüzgar hızı ve güneş ışığı yoğunluğu aralığında Maksimum Güç Noktası Takibi (MPPT) sağ10/17/2025
Maliyet Etkin Rüzgar-Güneş Hibrit Çözümü: Buck-Boost Konvertör & Akıllı Şarj Sistem Maliyetini AzaltırÖzetBu çözüm, yenilikçi bir yüksek verimli rüzgar-güneş hibrit enerji üretim sistemi önermektedir. Mevcut teknolojilerin temel zayıflıklarını - düşük enerji kullanımı, kısa pil ömrü ve zayıf sistem istikrarı gibi sorunları ele alarak, sistem tamamen dijital olarak kontrol edilen buck-boost DC/DC dönüştürücüler, ara sıra paralel teknoloji ve akıllı üç aşamalı şarj algoritması kullanmaktadır. Bu, daha geniş bir rüzgar hızı ve güneş ışığı yoğunluğu aralığında Maksimum Güç Noktası Takibi (MPPT) sağ10/17/2025






