รถบรรทุก AGV หนัก 12 ตัน



คุณสมบัติหลัก
| แบรนด์ | Wone Store |
| หมายเลขรุ่น | รถบรรทุก AGV หนัก 12 ตัน |
| น้ำหนักบรรทุกกำหนด | 12 ton |
| ซีรีส์ | LY-AK-12T |
คำอธิบายผลิตภัณฑ์จากผู้จำหน่าย
วิธีการยึด AGV: สปริง, ไฮดรอลิก
ความเร็วในการขับเคลื่อนของ AGV: ความเร็วของ AGV ภายในอาคารคือ 0-60 เมตร/นาที หากความเร็วสูงกว่านี้ขึ้นอยู่กับสถานการณ์จริง แต่เมื่อพิจารณาถึงสภาพแวดล้อมในบริเวณทั่วไปของผู้ผลิต การรักษาความปลอดภัยของบุคลากร และน้ำหนักของสินค้าขณะที่ AGV กำลังทำงาน ขอแนะนำให้ความเร็วไม่ควรเกิน 30 เมตร/นาที (20 เมตร/นาทีสำหรับรถมาตรฐานขนาดบางมากในอุตสาหกรรมหม้อแปลงไฟฟ้า) ความเร็วสูงสุดที่ตั้งไว้สำหรับรถภายนอกอาคารคือ 5-10 กม./ชม. และความเร็วสูงสุดของรถที่ใช้ในท่าเรือนั้นคือ 36 กม./ชม. พร้อมกับอุปกรณ์การเปลี่ยนเกียร์แบบต่อเนื่อง
ความจุของแบตเตอรี่: ที่ใช้กันทั่วไปมีช่วงระหว่าง 50-1000 AH (แอมแปร์-ชั่วโมง) ซึ่งคำนวณจากกำลังมอเตอร์/ขนาดเส้นผ่าศูนย์กลางล้อ/ความชันที่สามารถขึ้นได้/ความเร็วสูงสุด/ระยะเวลาการใช้งาน (จากเปล่าจนถึงเต็มและโหลดเต็ม) และข้อมูลอื่นๆ ปัจจุบัน AGV ขนาด 100 ตันที่ใช้กันทั่วไปมีความจุแบตเตอรี่ 96V300AH สำหรับการทำงาน 4 ชั่วโมงทั้งในกรณีที่โหลดเปล่าและโหลดเต็ม
ระบบพลังงาน Langyu: ระบบพลังงานไฟฟ้าบริสุทธิ์ ใช้แบตเตอรี่ลิเธียมฟอสเฟตเหล็กแบบไม่ต้องบำรุงรักษาระดับรถยนต์สำหรับการจ่ายพลังงาน
อุณหภูมิในการทำงานของแบตเตอรี่: มาตรฐานทั่วไปแนะนำให้อุณหภูมิในการทำงานของแบตเตอรี่อยู่ระหว่าง -20° ถึง 45° และอุณหภูมิสุดขั้วระหว่าง -40° ถึง 65° (มาพร้อมกับอุปกรณ์ทำความร้อนเองหรือเครื่องปรับอากาศ) อุณหภูมิในการชาร์จควรอยู่เหนือ 0 องศา
วิธีการชาร์จ: ชาร์จด้วยมือหรือชาร์จอัตโนมัติ (เมื่อ AGV ตรวจจับว่าระดับพลังงานต่ำกว่าค่าที่กำหนด จะทำการวิ่งไปยังอุปกรณ์ชาร์จเพื่อชาร์จอัตโนมัติ) ชาร์จอัตโนมัติรวมถึงการจ่ายไฟโดยไร้การสัมผัส การทดสอบการชาร์จ และการชาร์จที่ด้านล่าง
วิธีการนำทางของ AGV หลักๆ ประกอบด้วย:
1. การนำทางด้วยแถบแม่เหล็ก
คล้ายกับการนำทางด้วยแม่เหล็กไฟฟ้า โดยใช้เทปแม่เหล็กบนพื้นถนนแทนการฝังสายโลหะใต้ดิน และทำให้เกิดการนำทางผ่านสัญญาณแม่เหล็ก มีความยืดหยุ่นมากขึ้น ง่ายต่อการเปลี่ยนหรือขยายเส้นทาง และการวางเทปแม่เหล็กเป็นเรื่องที่ง่าย แต่วิธีการนำทางนี้อาจถูกแทรกแซงโดยวัสดุโลหะรอบวงจร และเทปแม่เหล็กอาจเสียหายจากการกระทบของเครื่องจักร ทำให้ความน่าเชื่อถือของการนำทางได้รับผลกระทบจากภายนอก
2. การนำทางด้วยเลเซอร์ SLAM
การนำทางด้วยเลเซอร์คือการติดตั้งกระจกสะท้อนแสงเลเซอร์ที่มีตำแหน่งแน่นอนรอบเส้นทางการขับเคลื่อนของ AGV AGV ส่งลำแสงเลเซอร์ผ่านเครื่องสแกนเลเซอร์และรวบรวมลำแสงที่สะท้อนกลับมาจากกระจกสะท้อน เพื่อกำหนดตำแหน่งและทิศทางปัจจุบัน และนำทาง AGV ผ่านการคำนวณเรขาคณิตสามเหลี่ยมอย่างต่อเนื่อง ข้อดีที่สุดของเทคโนโลยีนี้คือ AGV สามารถระบุตำแหน่งได้อย่างแม่นยำ; ไม่จำเป็นต้องมีสิ่งอำนวยความสะดวกในการระบุตำแหน่งบนพื้น; เส้นทางการขับเคลื่อนสามารถปรับเปลี่ยนได้และเหมาะสมกับสภาพแวดล้อมหลายประเภท เป็นวิธีการนำทางที่ล้ำหน้าที่ได้รับความนิยมจากผู้ผลิต AGV ต่างประเทศจำนวนมาก; ข้อเสียคือต้นทุนการผลิตสูง ความต้องการสภาพแวดล้อมค่อนข้างเข้มงวด (แสงภายนอก ความต้องการพื้น ความต้องการในการมองเห็น ฯลฯ) และไม่เหมาะสำหรับการใช้งานภายนอกอาคาร (โดยเฉพาะอย่างยิ่งที่ไวต่อฝน หิมะ และหมอก)
3. การนำทางด้วย GNSS-GPS/Beidou
พารามิเตอร์พื้นฐาน
ประเภท AGV: ยกขึ้นด้านหลัง
ความจุสูงสุด KG: 12000 KG
น้ำหนักรถ: 3000 KG
โหมดการขับเคลื่อน: แบบดิฟเฟอเรนเชียล
ทิศทางการเคลื่อนที่: ตรงไป-กลับ ซ้าย-ขวา หมุนที่ที่
วิธีการนำทาง: แถบแม่เหล็ก
ขนาดตัวรถ (ยาว, กว้าง, สูง) มม.: 3400x1200x440
ระยะห่างจากพื้นถึงแชสซี มม.: 35
สถานการณ์การใช้งาน: ภายในอาคาร
ความแม่นยำในการระบุตำแหน่ง มม.: ±10มม.
ความแม่นยำในการนำทาง มม.: ±10มม.
ความเร็วในการขับเคลื่อนเมื่อโหลดเปล่า/โหลดเต็ม: 0-15
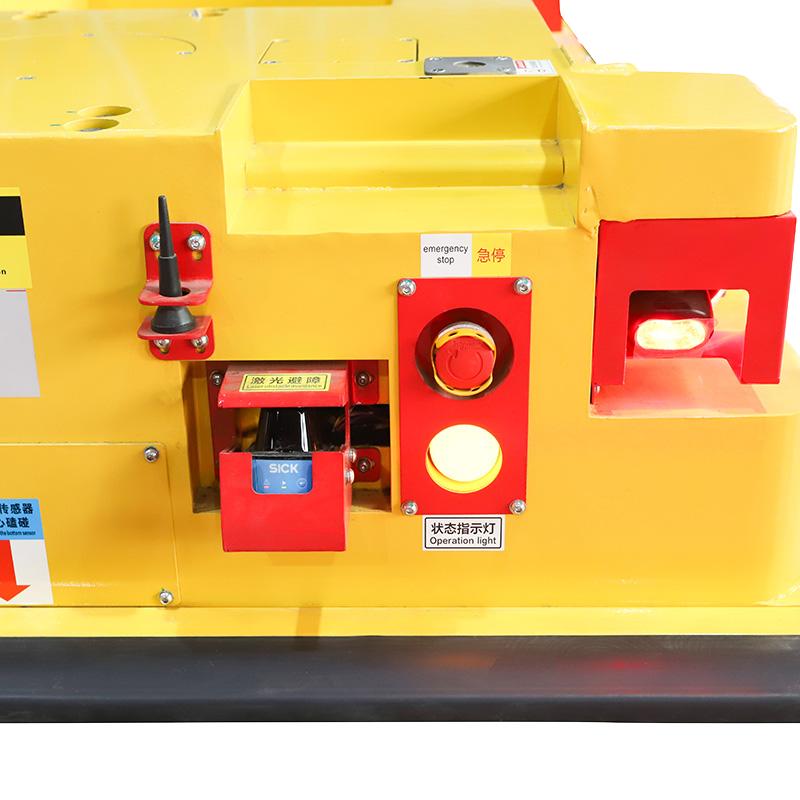
การป้องกันความปลอดภัย: เซ็นเซอร์หลีกเลี่ยงอุปสรรคด้วยเลเซอร์ + ขอบสัมผัสความปลอดภัย + ระบบเตือนด้วยเสียงและไฟ + ปุ่มหยุดฉุกเฉิน

สินค้าที่เกี่ยวข้อง





ความรู้ที่เกี่ยวข้อง
-
 อุบัติเหตุที่เกิดขึ้นกับหม้อแปลงหลักและปัญหาในการทำงานของแก๊สเบา1. บันทึกอุบัติเหตุ (วันที่ 19 มีนาคม 2019)เมื่อเวลา 16:13 น. วันที่ 19 มีนาคม 2019 ระบบตรวจสอบหลังบ้านรายงานการกระทำของแก๊สเบาของหม้อแปลงไฟฟ้าหลักหมายเลข 3 ตาม มาตรฐานปฏิบัติงานหม้อแปลงไฟฟ้า (DL/T572-2010) บุคลากรด้านการดำเนินการและบำรุงรักษา (O&M) ได้ตรวจสอบสภาพที่หน้างานของหม้อแปลงไฟฟ้าหลักหมายเลข 3การยืนยันที่หน้างาน: แผงควบคุมไม่ใช่ไฟฟ้า WBH ของหม้อแปลงไฟฟ้าหลักหมายเลข 3 รายงานการกระทำของแก๊สเบาเฟส B ของตัวหม้อแปลง และการรีเซ็ตไม่ได้ผล บุคลากร O&M ได้ตรวจสอบตัวตรวจจับแก๊สเฟส B และกล02/05/2026
อุบัติเหตุที่เกิดขึ้นกับหม้อแปลงหลักและปัญหาในการทำงานของแก๊สเบา1. บันทึกอุบัติเหตุ (วันที่ 19 มีนาคม 2019)เมื่อเวลา 16:13 น. วันที่ 19 มีนาคม 2019 ระบบตรวจสอบหลังบ้านรายงานการกระทำของแก๊สเบาของหม้อแปลงไฟฟ้าหลักหมายเลข 3 ตาม มาตรฐานปฏิบัติงานหม้อแปลงไฟฟ้า (DL/T572-2010) บุคลากรด้านการดำเนินการและบำรุงรักษา (O&M) ได้ตรวจสอบสภาพที่หน้างานของหม้อแปลงไฟฟ้าหลักหมายเลข 3การยืนยันที่หน้างาน: แผงควบคุมไม่ใช่ไฟฟ้า WBH ของหม้อแปลงไฟฟ้าหลักหมายเลข 3 รายงานการกระทำของแก๊สเบาเฟส B ของตัวหม้อแปลง และการรีเซ็ตไม่ได้ผล บุคลากร O&M ได้ตรวจสอบตัวตรวจจับแก๊สเฟส B และกล02/05/2026 -
 ความผิดปกติและการจัดการของวงจรเดี่ยวต่อพื้นในสายส่งไฟฟ้า 10kVลักษณะและอุปกรณ์ตรวจจับข้อบกพร่องการต่อพื้นเฟสเดียว1. ลักษณะของข้อบกพร่องการต่อพื้นเฟสเดียวสัญญาณเตือนกลาง:เสียงกริ่งเตือนดังขึ้น และหลอดไฟแสดงสถานะที่ระบุว่า “มีข้อบกพร่องการต่อพื้นบนบัสเซกชัน [X] กิโลโวลต์ หมายเลข [Y]” สว่างขึ้น ในระบบซึ่งใช้คอยล์เปเทอร์เซน (คอยล์ดับอาร์ค) ต่อพื้นจุดศูนย์กลาง หลอดไฟแสดงสถานะ “คอยล์เปเทอร์เซนทำงาน” ก็จะสว่างขึ้นเช่นกันการแสดงผลของมิเตอร์ตรวจสอบฉนวน:แรงดันไฟฟ้าของเฟสที่เกิดข้อบกพร่องลดลง (ในกรณีการต่อพื้นแบบไม่สมบูรณ์) หรือลดลงเป็นศูนย์ (ในกรณีการต่อพื้นแบบแข็ง)01/30/2026
ความผิดปกติและการจัดการของวงจรเดี่ยวต่อพื้นในสายส่งไฟฟ้า 10kVลักษณะและอุปกรณ์ตรวจจับข้อบกพร่องการต่อพื้นเฟสเดียว1. ลักษณะของข้อบกพร่องการต่อพื้นเฟสเดียวสัญญาณเตือนกลาง:เสียงกริ่งเตือนดังขึ้น และหลอดไฟแสดงสถานะที่ระบุว่า “มีข้อบกพร่องการต่อพื้นบนบัสเซกชัน [X] กิโลโวลต์ หมายเลข [Y]” สว่างขึ้น ในระบบซึ่งใช้คอยล์เปเทอร์เซน (คอยล์ดับอาร์ค) ต่อพื้นจุดศูนย์กลาง หลอดไฟแสดงสถานะ “คอยล์เปเทอร์เซนทำงาน” ก็จะสว่างขึ้นเช่นกันการแสดงผลของมิเตอร์ตรวจสอบฉนวน:แรงดันไฟฟ้าของเฟสที่เกิดข้อบกพร่องลดลง (ในกรณีการต่อพื้นแบบไม่สมบูรณ์) หรือลดลงเป็นศูนย์ (ในกรณีการต่อพื้นแบบแข็ง)01/30/2026 -
 การดำเนินงานโหมดต่อพื้นจุดกลางสำหรับหม้อแปลงไฟฟ้าในระบบไฟฟ้า 110kV~220kVการจัดการโหมดการต่อพื้นของจุดกลางสำหรับหม้อแปลงในระบบไฟฟ้าแรงดัน 110kV~220kV ต้องสอดคล้องกับข้อกำหนดการทนทานของฉนวนที่จุดกลางของหม้อแปลง และควรพยายามรักษาค่าความต้านทานลำดับศูนย์ของสถานีไฟฟ้าให้คงที่ โดยมั่นใจว่าค่าความต้านทานรวมลำดับศูนย์ที่จุดเกิดลัดวงจรใด ๆ ในระบบไม่ควรเกินสามเท่าของค่าความต้านทานรวมลำดับบวกสำหรับหม้อแปลงแรงดัน 220kV และ 110kV ในโครงการสร้างใหม่และโครงการปรับปรุงทางเทคนิค โหมดการต่อพื้นของจุดกลางต้องปฏิบัติตามข้อกำหนดดังต่อไปนี้อย่างเคร่งครัด:1. หม้อแปลงอัตโนมัติจุดกลางของหม้01/29/2026
การดำเนินงานโหมดต่อพื้นจุดกลางสำหรับหม้อแปลงไฟฟ้าในระบบไฟฟ้า 110kV~220kVการจัดการโหมดการต่อพื้นของจุดกลางสำหรับหม้อแปลงในระบบไฟฟ้าแรงดัน 110kV~220kV ต้องสอดคล้องกับข้อกำหนดการทนทานของฉนวนที่จุดกลางของหม้อแปลง และควรพยายามรักษาค่าความต้านทานลำดับศูนย์ของสถานีไฟฟ้าให้คงที่ โดยมั่นใจว่าค่าความต้านทานรวมลำดับศูนย์ที่จุดเกิดลัดวงจรใด ๆ ในระบบไม่ควรเกินสามเท่าของค่าความต้านทานรวมลำดับบวกสำหรับหม้อแปลงแรงดัน 220kV และ 110kV ในโครงการสร้างใหม่และโครงการปรับปรุงทางเทคนิค โหมดการต่อพื้นของจุดกลางต้องปฏิบัติตามข้อกำหนดดังต่อไปนี้อย่างเคร่งครัด:1. หม้อแปลงอัตโนมัติจุดกลางของหม้01/29/2026 -
 ทำไมสถานีไฟฟ้าจึงใช้หินกรวดและหินบดทำไมสถานีไฟฟ้าจึงใช้หินกรวดและหินปูนบด?ในสถานีไฟฟ้า อุปกรณ์ต่างๆ เช่น หม้อแปลงไฟฟ้าและระบบการกระจายพลังงาน สายส่งไฟฟ้า หม้อแปลงแรงดันไฟฟ้า หม้อแปลงกระแสไฟฟ้า และสวิตช์ตัดวงจร ทั้งหมดต้องมีการต่อพื้นดิน นอกจากการต่อพื้นดินแล้ว เราจะสำรวจอย่างลึกซึ้งว่าทำไมถึงใช้หินกรวดและหินปูนบดในสถานีไฟฟ้า แม้ว่าพวกมันจะดูธรรมดา แต่หินเหล่านี้มีบทบาทสำคัญในการรักษาความปลอดภัยและการทำงานในการออกแบบการต่อพื้นดินของสถานีไฟฟ้า—โดยเฉพาะเมื่อใช้วิธีการต่อพื้นดินหลายวิธี—หินปูนบดหรือหินกรวดจะถูกโรยทั่วบริเวณสนามสำหรับ01/29/2026
ทำไมสถานีไฟฟ้าจึงใช้หินกรวดและหินบดทำไมสถานีไฟฟ้าจึงใช้หินกรวดและหินปูนบด?ในสถานีไฟฟ้า อุปกรณ์ต่างๆ เช่น หม้อแปลงไฟฟ้าและระบบการกระจายพลังงาน สายส่งไฟฟ้า หม้อแปลงแรงดันไฟฟ้า หม้อแปลงกระแสไฟฟ้า และสวิตช์ตัดวงจร ทั้งหมดต้องมีการต่อพื้นดิน นอกจากการต่อพื้นดินแล้ว เราจะสำรวจอย่างลึกซึ้งว่าทำไมถึงใช้หินกรวดและหินปูนบดในสถานีไฟฟ้า แม้ว่าพวกมันจะดูธรรมดา แต่หินเหล่านี้มีบทบาทสำคัญในการรักษาความปลอดภัยและการทำงานในการออกแบบการต่อพื้นดินของสถานีไฟฟ้า—โดยเฉพาะเมื่อใช้วิธีการต่อพื้นดินหลายวิธี—หินปูนบดหรือหินกรวดจะถูกโรยทั่วบริเวณสนามสำหรับ01/29/2026 -
 ทำไมต้องต่อกราวน์ที่แกนหม้อแปลงเพียงจุดเดียว ไม่ใช่ว่าการต่อกราวน์หลายจุดจะเชื่อถือได้มากกว่าหรือทำไมต้องต่อกราวด์แกนหม้อแปลง?ในระหว่างการทำงาน แกนหม้อแปลง โครงสร้างโลหะ ส่วนประกอบ และชิ้นส่วนที่ยึดแกนและขดลวดจะอยู่ในสนามไฟฟ้าที่แรง ภายใต้ความกระทบของสนามไฟฟ้านี้ พวกมันจะได้รับศักย์ไฟฟ้าที่ค่อนข้างสูงเมื่อเทียบกับพื้นดิน หากแกนไม่ได้ต่อกราวด์ จะมีความต่างศักย์ระหว่างแกนและโครงสร้างที่ยึดและถังที่ต่อกราวด์ ซึ่งอาจทำให้เกิดการปล่อยประจุไฟฟ้าแบบกระชากนอกจากนี้ ในระหว่างการทำงาน สนามแม่เหล็กที่แรงจะโอบรอบขดลวด แกนและโครงสร้างโลหะต่างๆ ส่วนประกอบ และชิ้นส่วนจะอยู่ในสนามแม่เหล็กที่ไม่สม่ำเสมอ และ01/29/2026
ทำไมต้องต่อกราวน์ที่แกนหม้อแปลงเพียงจุดเดียว ไม่ใช่ว่าการต่อกราวน์หลายจุดจะเชื่อถือได้มากกว่าหรือทำไมต้องต่อกราวด์แกนหม้อแปลง?ในระหว่างการทำงาน แกนหม้อแปลง โครงสร้างโลหะ ส่วนประกอบ และชิ้นส่วนที่ยึดแกนและขดลวดจะอยู่ในสนามไฟฟ้าที่แรง ภายใต้ความกระทบของสนามไฟฟ้านี้ พวกมันจะได้รับศักย์ไฟฟ้าที่ค่อนข้างสูงเมื่อเทียบกับพื้นดิน หากแกนไม่ได้ต่อกราวด์ จะมีความต่างศักย์ระหว่างแกนและโครงสร้างที่ยึดและถังที่ต่อกราวด์ ซึ่งอาจทำให้เกิดการปล่อยประจุไฟฟ้าแบบกระชากนอกจากนี้ ในระหว่างการทำงาน สนามแม่เหล็กที่แรงจะโอบรอบขดลวด แกนและโครงสร้างโลหะต่างๆ ส่วนประกอบ และชิ้นส่วนจะอยู่ในสนามแม่เหล็กที่ไม่สม่ำเสมอ และ01/29/2026 -
 การเข้าใจการต่อกราวด์ของทรานสฟอร์เมอร์แบบกลางI. จุดกลางคืออะไร?ในหม้อแปลงและเครื่องกำเนิดไฟฟ้า จุดกลางคือจุดเฉพาะในวงจรที่มีแรงดันสัมบูรณ์ระหว่างจุดนี้กับแต่ละเทอร์มินอลภายนอกเท่ากัน ในแผนภาพด้านล่าง จุดOแทนจุดกลางII. ทำไมจึงต้องต่อจุดกลางลงดิน?วิธีการเชื่อมต่อทางไฟฟ้าระหว่างจุดกลางกับพื้นโลกในระบบไฟฟ้าสามเฟสเรียกว่าวิธีการต่อจุดกลางลงดิน วิธีการต่อนี้มีผลโดยตรงต่อ:ความปลอดภัย ความเชื่อถือได้ และเศรษฐศาสตร์ของระบบไฟฟ้า;การเลือกระดับฉนวนของอุปกรณ์ระบบ;ระดับแรงดันเกิน;แผนการป้องกันรีเลย์;การรบกวนแม่เหล็กไฟฟ้ากับสายสื่อสาร.โดยทั่วไปแล้ววิธีกา01/29/2026
การเข้าใจการต่อกราวด์ของทรานสฟอร์เมอร์แบบกลางI. จุดกลางคืออะไร?ในหม้อแปลงและเครื่องกำเนิดไฟฟ้า จุดกลางคือจุดเฉพาะในวงจรที่มีแรงดันสัมบูรณ์ระหว่างจุดนี้กับแต่ละเทอร์มินอลภายนอกเท่ากัน ในแผนภาพด้านล่าง จุดOแทนจุดกลางII. ทำไมจึงต้องต่อจุดกลางลงดิน?วิธีการเชื่อมต่อทางไฟฟ้าระหว่างจุดกลางกับพื้นโลกในระบบไฟฟ้าสามเฟสเรียกว่าวิธีการต่อจุดกลางลงดิน วิธีการต่อนี้มีผลโดยตรงต่อ:ความปลอดภัย ความเชื่อถือได้ และเศรษฐศาสตร์ของระบบไฟฟ้า;การเลือกระดับฉนวนของอุปกรณ์ระบบ;ระดับแรงดันเกิน;แผนการป้องกันรีเลย์;การรบกวนแม่เหล็กไฟฟ้ากับสายสื่อสาร.โดยทั่วไปแล้ววิธีกา01/29/2026
โซลูชันที่เกี่ยวข้อง
-
 โซลูชันพลังงานไฮบริดลม-แสงอาทิตย์แบบบูรณาการสำหรับเกาะที่อยู่ห่างไกลบทคัดย่อข้อเสนอแนะนี้นำเสนอโซลูชันพลังงานแบบบูรณาการที่ผสมผสานเทคโนโลยีพลังงานลม การผลิตไฟฟ้าจากแสงอาทิตย์ การเก็บพลังงานด้วยน้ำพุ และการกรองน้ำทะเลให้เป็นน้ำจืดอย่างลึกซึ้ง มุ่งหวังที่จะแก้ไขปัญหาหลักที่เกาะต่างๆ กำลังเผชิญหน้า เช่น การครอบคลุมของระบบไฟฟ้าที่ยากลำบาก ค่าใช้จ่ายสูงของการผลิตไฟฟ้าด้วยเครื่องกำเนิดไฟฟ้าดีเซล ข้อจำกัดของระบบเก็บพลังงานแบบแบตเตอรี่แบบดั้งเดิม และความขาดแคลนของทรัพยากรน้ำจืด โซลูชันนี้สามารถสร้างความสอดคล้องและอิสระใน "การจ่ายไฟ - การเก็บพลังงาน - การจ่ายน้ำ" มอบทางเ10/17/2025
โซลูชันพลังงานไฮบริดลม-แสงอาทิตย์แบบบูรณาการสำหรับเกาะที่อยู่ห่างไกลบทคัดย่อข้อเสนอแนะนี้นำเสนอโซลูชันพลังงานแบบบูรณาการที่ผสมผสานเทคโนโลยีพลังงานลม การผลิตไฟฟ้าจากแสงอาทิตย์ การเก็บพลังงานด้วยน้ำพุ และการกรองน้ำทะเลให้เป็นน้ำจืดอย่างลึกซึ้ง มุ่งหวังที่จะแก้ไขปัญหาหลักที่เกาะต่างๆ กำลังเผชิญหน้า เช่น การครอบคลุมของระบบไฟฟ้าที่ยากลำบาก ค่าใช้จ่ายสูงของการผลิตไฟฟ้าด้วยเครื่องกำเนิดไฟฟ้าดีเซล ข้อจำกัดของระบบเก็บพลังงานแบบแบตเตอรี่แบบดั้งเดิม และความขาดแคลนของทรัพยากรน้ำจืด โซลูชันนี้สามารถสร้างความสอดคล้องและอิสระใน "การจ่ายไฟ - การเก็บพลังงาน - การจ่ายน้ำ" มอบทางเ10/17/2025 -
 ระบบไฮบริดพลังงานลม-แสงอาทิตย์อัจฉริยะพร้อมการควบคุม Fuzzy-PID สำหรับการจัดการแบตเตอรี่ที่ดีขึ้นและการควบคุมจุดกำลังสูงสุดบทคัดย่อข้อเสนอแนะนี้นำเสนอระบบการผลิตพลังงานไฮบริดลม-แสงอาทิตย์ที่อาศัยเทคโนโลยีควบคุมขั้นสูง เพื่อแก้ไขปัญหาความต้องการใช้ไฟฟ้าในพื้นที่ไกลและสถานการณ์การใช้งานพิเศษได้อย่างมีประสิทธิภาพและประหยัด หัวใจสำคัญของระบบอยู่ที่ระบบควบคุมอัจฉริยะที่มีศูนย์กลางเป็นไมโครโปรเซสเซอร์ ATmega16 ซึ่งระบบดังกล่าวทำหน้าที่ติดตามจุดกำลังสูงสุด (MPPT) สำหรับทั้งพลังงานลมและพลังงานแสงอาทิตย์ และใช้อัลกอริทึมที่รวมระหว่าง PID และการควบคุมแบบคลุมเครือเพื่อการจัดการการชาร์จ/ปล่อยประจุของแบตเตอรี่ซึ่งเป็นส่วนประกอบห10/17/2025
ระบบไฮบริดพลังงานลม-แสงอาทิตย์อัจฉริยะพร้อมการควบคุม Fuzzy-PID สำหรับการจัดการแบตเตอรี่ที่ดีขึ้นและการควบคุมจุดกำลังสูงสุดบทคัดย่อข้อเสนอแนะนี้นำเสนอระบบการผลิตพลังงานไฮบริดลม-แสงอาทิตย์ที่อาศัยเทคโนโลยีควบคุมขั้นสูง เพื่อแก้ไขปัญหาความต้องการใช้ไฟฟ้าในพื้นที่ไกลและสถานการณ์การใช้งานพิเศษได้อย่างมีประสิทธิภาพและประหยัด หัวใจสำคัญของระบบอยู่ที่ระบบควบคุมอัจฉริยะที่มีศูนย์กลางเป็นไมโครโปรเซสเซอร์ ATmega16 ซึ่งระบบดังกล่าวทำหน้าที่ติดตามจุดกำลังสูงสุด (MPPT) สำหรับทั้งพลังงานลมและพลังงานแสงอาทิตย์ และใช้อัลกอริทึมที่รวมระหว่าง PID และการควบคุมแบบคลุมเครือเพื่อการจัดการการชาร์จ/ปล่อยประจุของแบตเตอรี่ซึ่งเป็นส่วนประกอบห10/17/2025 -
 โซลูชันไฮบริดลม-แสงอาทิตย์ที่คุ้มค่า: คอนเวอร์เตอร์บัค-บูสต์และระบบชาร์จอัจฉริยะลดต้นทุนระบบบทคัดย่อโซลูชันนี้เสนอระบบการผลิตไฟฟ้าไฮบริดจากลมและแสงอาทิตย์ที่มีประสิทธิภาพสูงอย่างน่าสนใจ ในการแก้ไขข้อบกพร่องหลักของเทคโนโลยีปัจจุบัน เช่น การใช้พลังงานต่ำ อายุการใช้งานแบตเตอรี่สั้น และความเสถียรของระบบไม่ดี ระบบใช้คอนเวอร์เตอร์ DC/DC แบบบัค-บูสต์ที่ควบคุมด้วยดิจิทัลทั้งหมด เทคโนโลยีการขนานแบบอินเทอร์เลฟ และอัลกอริธึมการชาร์จสามขั้นตอนอัจฉริยะ ทำให้สามารถติดตามจุดกำลังสูงสุด (MPPT) ได้ในช่วงความเร็วลมและรังสีแสงอาทิตย์ที่กว้างขึ้น ปรับปรุงประสิทธิภาพการจับพลังงานได้อย่างมาก ขยายอายุการใช้ง10/17/2025
โซลูชันไฮบริดลม-แสงอาทิตย์ที่คุ้มค่า: คอนเวอร์เตอร์บัค-บูสต์และระบบชาร์จอัจฉริยะลดต้นทุนระบบบทคัดย่อโซลูชันนี้เสนอระบบการผลิตไฟฟ้าไฮบริดจากลมและแสงอาทิตย์ที่มีประสิทธิภาพสูงอย่างน่าสนใจ ในการแก้ไขข้อบกพร่องหลักของเทคโนโลยีปัจจุบัน เช่น การใช้พลังงานต่ำ อายุการใช้งานแบตเตอรี่สั้น และความเสถียรของระบบไม่ดี ระบบใช้คอนเวอร์เตอร์ DC/DC แบบบัค-บูสต์ที่ควบคุมด้วยดิจิทัลทั้งหมด เทคโนโลยีการขนานแบบอินเทอร์เลฟ และอัลกอริธึมการชาร์จสามขั้นตอนอัจฉริยะ ทำให้สามารถติดตามจุดกำลังสูงสุด (MPPT) ได้ในช่วงความเร็วลมและรังสีแสงอาทิตย์ที่กว้างขึ้น ปรับปรุงประสิทธิภาพการจับพลังงานได้อย่างมาก ขยายอายุการใช้ง10/17/2025






