12 ton Ağırlıklı Ağır AGV



Key attributes
| Brandi | Wone Store |
| Model NO. | 12 ton Ağırlıklı Ağır AGV |
| Nominal Yük Kapasitesi | 12 ton |
| serî | LY-AK-12T |
Nivîsanên hilberan ji alavê
AGV askıda kalma yöntemi: yay, hidrolik
AGV sürüş hızı: İç mekan AGV'nin hızı 0-60m/dk. Eğer hız daha yüksekse, bu durum gerçek koşullara bağlıdır. Ancak, genel üretim işletmelerinin saha ortamını, personelin güvenliğini ve AGV'nin çalışırken taşıdığı yükün ağırlığını düşünerek, hızın 30m/dk'yi aşmaması önerilmektedir. (Dönüşüm sektöründe ultra ince standart araçlar için 20m/dk) Dışarı araçların maksimum hız ayarı 5-10Km/sa'dır ve liman araçlarının maksimum hızı 36Km/sa'dır. Sürekli değişken vites cihazı ile donatılmıştır.
Pil kapasitesi: Genellikle kullanılanlar 50-1000AH (amper-saat) arasındadır, bu, motor gücü/tekerlek çapı/eğim tırmanma/maksimum hız/dayanma süresi (boş dolu dönüş/dolu yük) ve diğer veriler üzerine hesaplanır. Şu anda yaygın olarak kullanılan 100 ton AGV'nin pil kapasitesi, boş ve dolu yük için 4 saatlik 96V300AH'dır.
Langyu güç sistemi: saf elektrikli sistem, otomotiv sınıfı bakım gerektirmeyen lif demir fosfat pilleri ile güç sağlar
Pil çalışma sıcaklığı: normal standartlarda pil çalışma sıcaklıkları -20° ile 45° arasında tavsiye edilir, aşırı sıcaklıklarda -40° ile 65° (kendiliğinden ısıtma cihazı veya klima ile donatılmış). Şarj sıcaklığı sıfır derecenin üzerinde olmalıdır.
Şarj yöntemi: el ile şarj veya otomatik şarj (AGV'nin otomatik olarak belirlenen değerin altına düştüğünü tespit ettiğinde, otomatik olarak şarj cihazına gidebilir ve kendini şarj edebilir), otomatik şarj kontaktsız güç sağlama, test şarjı ve alt şarjı içerir.
AGV navigasyon yöntemleri şunları içerir:
1. Manyetik bant navigasyonu
Elektromanyetik rehberlemeye benzer şekilde, yer altına metal tel gömülmek yerine yol yüzeyinde manyetik bant kullanılır ve manyetik indüksiyon sinyalleri yoluyla rehberlik sağlanır. Bu, daha esnek bir yapıya sahiptir, yol değiştirme veya genişletme daha kolaydır ve manyetik bant basit ve kolay uygulanabilir, ancak bu rehberleme yöntemi çevredeki metaller tarafından kolayca etkilenebilir ve manyetik bant makinalar tarafından kolayca hasar görülebilir, bu nedenle rehberlemenin güvenliği dış faktörlere büyük ölçüde bağlıdır.
2. Lazer SLAM Navigasyonu
Lazer rehberlemesi, AGV'nin sürüş yolunun etrafına hassas pozisyonlanmış lazer yansıtmaları monte edilmesiyle gerçekleştirilir. AGV, bir lazer tarayıcı aracılığıyla lazer ışınları gönderir ve yansıtmalardan gelen lazer ışınlarını toplayarak şu anki konumunu ve yönünü belirler ve sürekli üçgen geometri hesaplamalarıyla AGV'yi yönlendirir. Bu teknolojinin en büyük avantajı, AGV'nin kesin bir şekilde konumlandırılabilmesidir; zemine başka bir konumlandırma tesisatı gerekmemektedir; sürüş yolu çok esnektir ve çeşitli saha ortamlarına uyum sağlayabilir. Bu, şu anda birçok yabancı AGV üreticisi tarafından tercih edilen ileri düzeydeki rehberleme yöntemidir; dezavantajı ise yüksek üretim maliyeti, nispeten sert çevre gereklilikleri (dış ışık, zemin gereklilikleri, görünürlik gereklilikleri vb.) ve açık hava kullanımına uygun olmamasıdır (özellikle yağmur, kar ve sis etkilenmesi).
3. GNSS-GPS/Beidou navigasyonu.
Temel parametreler
AGV tipi: Geri yükleme kaldırma
Nominal yük KG: 12000 KG
Araç ağırlığı: 3000 KG
Sürücü modu: Diferansiyel
Hareket yönü: Doğru ileri ve geri, sol ve sağ, yerinde dönme
Navigasyon yöntemi: Manyetik bant
Kasa boyutları (uzunluk, genişlik ve yükseklik) mm: 3400x1200x440
Şasi yer açıklığı mm: 35
Kullanım senaryosu: İç mekan
Konumlandırma doğruluğu mm: ±10mm
Navigasyon doğruluğu mm: ±10mm
Boş/dolu yük sürüş hızı: 0-15
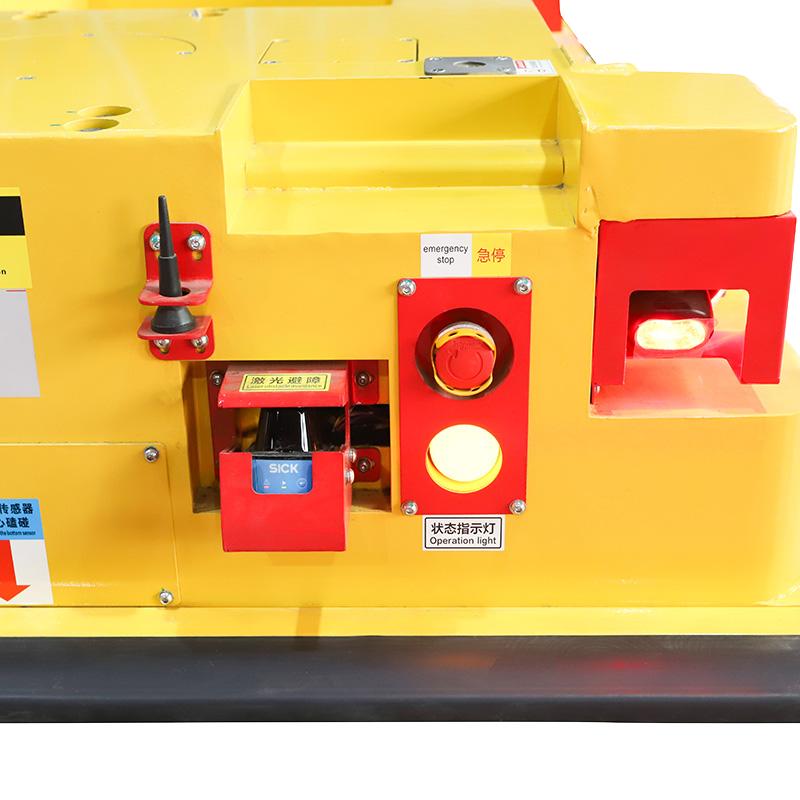
Güvenlik koruması: Lazer engel kaçınma sensörü + güvenlik kenar dokunuşu + ses ve ışık alarmı + acil durdurma butonu

Malperên Deyalî





Zanînên Sahih
-
 Transformatorê Yekêm û Pirsgirêkek Daqiqên Gazê Bêdar a IEE-Business1. Peyda Qazaya (Març 19, 2019)Bêya 16:13 di roja Març 19, 2019 de, sistemê pîştimariyê rapor ên birayên gasê hêla leh bû yên transformatora sereke ya numarê 3. Li ser amadeya Qaytandina Operasyonê ya Transformatoran (DL/T572-2010), karkirên operasyon û mînguha (O&M) şertê ji herêmekê yên transformatora sereke ya numarê 3 kontrol kir.Teyit ji herêmekê: Panela WBH paqijeyê nelektrîk nayê yên transformatora sereke ya numarê 3 birayên gasê hêla leh bû yên fîlana B reyazkir û vegera niha rêvekir02/05/2026
Transformatorê Yekêm û Pirsgirêkek Daqiqên Gazê Bêdar a IEE-Business1. Peyda Qazaya (Març 19, 2019)Bêya 16:13 di roja Març 19, 2019 de, sistemê pîştimariyê rapor ên birayên gasê hêla leh bû yên transformatora sereke ya numarê 3. Li ser amadeya Qaytandina Operasyonê ya Transformatoran (DL/T572-2010), karkirên operasyon û mînguha (O&M) şertê ji herêmekê yên transformatora sereke ya numarê 3 kontrol kir.Teyit ji herêmekê: Panela WBH paqijeyê nelektrîk nayê yên transformatora sereke ya numarê 3 birayên gasê hêla leh bû yên fîlana B reyazkir û vegera niha rêvekir02/05/2026 -
 Xalakên û Pêşkêşkirina Yekfîlan Dihênan da Tirazên 10kVTaybetmendiyên şiklê xwezayî û amûrên vedibijêrin şiklê xwezayî ya yek-fazê ya li ser zemîn1. Taybetmendiyên şiklê xwezayî ya yek-fazê ya li ser zemînÎşaretên alarmê yên navendî:Zilê alarmê dide, û çirka ku bi "Şiklê xwezayî ya li ser zemîn li ser kablî ya [X] kV ya beşa [Y] ya bus" tê nîşankirin dike. Li sistemên ku li ser zemîn bi kûlîka Petersen (kûlîka rûniştkirinê ya arkê) hatiye çêkirin, çirka "Kûlîka Petersen kar dike" jî dike.Nîşanên voltmetreya kontrolkirina îzolasyonê:Voltajê ya fazê y01/30/2026
Xalakên û Pêşkêşkirina Yekfîlan Dihênan da Tirazên 10kVTaybetmendiyên şiklê xwezayî û amûrên vedibijêrin şiklê xwezayî ya yek-fazê ya li ser zemîn1. Taybetmendiyên şiklê xwezayî ya yek-fazê ya li ser zemînÎşaretên alarmê yên navendî:Zilê alarmê dide, û çirka ku bi "Şiklê xwezayî ya li ser zemîn li ser kablî ya [X] kV ya beşa [Y] ya bus" tê nîşankirin dike. Li sistemên ku li ser zemîn bi kûlîka Petersen (kûlîka rûniştkirinê ya arkê) hatiye çêkirin, çirka "Kûlîka Petersen kar dike" jî dike.Nîşanên voltmetreya kontrolkirina îzolasyonê:Voltajê ya fazê y01/30/2026 -
 Moda operasyonî da vengkirina dîmenê ji bo transformatorên şebê elektrik 110kV~220kVCihêna girîngkirina wêje nötr da ji bo dawereyên elektrik 110kV~220kV divê bixebitandina nişanên dijla wekheviya cihêna nötr yên transformatoran biguheze û hewce bike ku impedaansa sifiriyê ya stasyonên transformasyonê tevahî neqdar bike. Heta duayin dikare ku impedaansa sifiriyê yekbûyî ya her çendkêjiyê yên sisteman jêr be trehê ji impedaansa birinî yekbûyî neqde.Ji bo transformatoran 220kV û 110kV yên nûvekirin û rengkirin teknolojî, cihêna girîngkirina wêje nötr yan divê bexweste bibine:1. T01/29/2026
Moda operasyonî da vengkirina dîmenê ji bo transformatorên şebê elektrik 110kV~220kVCihêna girîngkirina wêje nötr da ji bo dawereyên elektrik 110kV~220kV divê bixebitandina nişanên dijla wekheviya cihêna nötr yên transformatoran biguheze û hewce bike ku impedaansa sifiriyê ya stasyonên transformasyonê tevahî neqdar bike. Heta duayin dikare ku impedaansa sifiriyê yekbûyî ya her çendkêjiyê yên sisteman jêr be trehê ji impedaansa birinî yekbûyî neqde.Ji bo transformatoran 220kV û 110kV yên nûvekirin û rengkirin teknolojî, cihêna girîngkirina wêje nötr yan divê bexweste bibine:1. T01/29/2026 -
 Bisînhê Li Kîjan Diyan Bistîn û Dîwarên Berzok û Pirîvan Bistinandin?چرا دەستگاھەکان دەستی کەمێک بە سەنجەر، شوێن، پیپڵ و چووندەکەن؟لە دەستگاھەکاندا، ئامێرەکەی جۆری ترانسفۆرمەری ناوڕاستی و ترانسفۆرمەری پاشتەر، خەوتە لێدەری، ترانسفۆرمەری هەژارە، ترانسفۆرمەری چاودێری، و چاودێرەکان هەمووی پێویستە بە گردن. لەوە ماوە، ئێستا دەبینین بەهۆی چی شوێن و چووندەکەرەکان زۆربەی کات پێشەوتن لە دەستگاھەکاندا بەکاردێت. گەرچە ئەوان پێشەوتن لە باشترین ڕوویان دەردەکەون، بەڵام ئەوان رولێکی گرنگی ئامانجی و کارکردنی دەبەستن.لە ڕێگەکەی گردنی دەستگاھ - بەخاصة کاتێک چەند ڕێگەی گردنیش هەبێت01/29/2026
Bisînhê Li Kîjan Diyan Bistîn û Dîwarên Berzok û Pirîvan Bistinandin?چرا دەستگاھەکان دەستی کەمێک بە سەنجەر، شوێن، پیپڵ و چووندەکەن؟لە دەستگاھەکاندا، ئامێرەکەی جۆری ترانسفۆرمەری ناوڕاستی و ترانسفۆرمەری پاشتەر، خەوتە لێدەری، ترانسفۆرمەری هەژارە، ترانسفۆرمەری چاودێری، و چاودێرەکان هەمووی پێویستە بە گردن. لەوە ماوە، ئێستا دەبینین بەهۆی چی شوێن و چووندەکەرەکان زۆربەی کات پێشەوتن لە دەستگاھەکاندا بەکاردێت. گەرچە ئەوان پێشەوتن لە باشترین ڕوویان دەردەکەون، بەڵام ئەوان رولێکی گرنگی ئامانجی و کارکردنی دەبەستن.لە ڕێگەکەی گردنی دەستگاھ - بەخاصة کاتێک چەند ڕێگەی گردنیش هەبێت01/29/2026 -
 Bisayda Niçin Yalnız Bir Noktada Topraklanmalı? Çok Noktalı Topraklama Daha Güvenilir Değil mi?Pîçey Transformer Pêçiyê Bêyîn Bêtirin?Di dema xebitandina de, pêçeya transformer, hemesên metalî yên, parçeyên û komponentyên ku pêçey û windingsê têkeve, hemî di elektrik zorî da ne. Li ser çavkanina elektrik zorî, wan potansiyelê bêyîn bêtirin di navbera bêtirin. Eger pêçey bêtirin ne, potansiyelê jêrîn di navbera pêçey û struktûrên clampê yên bêtirin û tankê de were, ku dikare werbigerekirinêya vegirtîn bigere.Li gorî, di dema xebitandina de, mekîn zorî windingsê de ne. Pêçeya û hemesên meta01/29/2026
Bisayda Niçin Yalnız Bir Noktada Topraklanmalı? Çok Noktalı Topraklama Daha Güvenilir Değil mi?Pîçey Transformer Pêçiyê Bêyîn Bêtirin?Di dema xebitandina de, pêçeya transformer, hemesên metalî yên, parçeyên û komponentyên ku pêçey û windingsê têkeve, hemî di elektrik zorî da ne. Li ser çavkanina elektrik zorî, wan potansiyelê bêyîn bêtirin di navbera bêtirin. Eger pêçey bêtirin ne, potansiyelê jêrîn di navbera pêçey û struktûrên clampê yên bêtirin û tankê de were, ku dikare werbigerekirinêya vegirtîn bigere.Li gorî, di dema xebitandina de, mekîn zorî windingsê de ne. Pêçeya û hemesên meta01/29/2026 -
 Biankarenin Nötr Zeminlendirmesini AnlamaI. Nîveçeya Neutralka Çi Ye?Dekantransformer û jeneratordan, nîveçeya neutrala pika xasî ya wînîngu e ku potensiyal absolutî dê be seretî yên derveyî ji wekheviye hêvî bibe. Di şemaya dehata de, pika O nîveçeya neutrala taybetand.II. Bîca Yekê Nîveçeya Neutrala Bena Zaravê?Metoda bina elektrikî di mesela nîveçeya neutrala û zemin de di sîstemê AC ên trîkolan de navê metoda bina neutrala hatne. Esa metoda bina direkta tevlîb dike:Bênûsî, bexwestinî û ekonomîya sîstemê elektrik;Hilbijartina rêzanê01/29/2026
Biankarenin Nötr Zeminlendirmesini AnlamaI. Nîveçeya Neutralka Çi Ye?Dekantransformer û jeneratordan, nîveçeya neutrala pika xasî ya wînîngu e ku potensiyal absolutî dê be seretî yên derveyî ji wekheviye hêvî bibe. Di şemaya dehata de, pika O nîveçeya neutrala taybetand.II. Bîca Yekê Nîveçeya Neutrala Bena Zaravê?Metoda bina elektrikî di mesela nîveçeya neutrala û zemin de di sîstemê AC ên trîkolan de navê metoda bina neutrala hatne. Esa metoda bina direkta tevlîb dike:Bênûsî, bexwestinî û ekonomîya sîstemê elektrik;Hilbijartina rêzanê01/29/2026
Çareseriyên Berdewamî
-
 Entegre Rüzgar-Güneş Hibrit Güç Çözümü Uzak Adalar İçinÖzetBu teklif, rüzgar enerjisi, güneş fotovoltaik enerji üretimi, pompalı hidro depolama ve deniz suyu tazlama teknolojilerini derin bir şekilde birleştiren yenilikçi entegre bir enerji çözümünü sunmaktadır. Uzak adaların karşılaştığı temel zorlukları, ağ kapsamının zorluğu, dizel enerji üretiminin yüksek maliyeti, geleneksel pillerin sınırlılığı ve tatlı su kaynaklarının azlığı gibi konulara sistemli bir şekilde çözüm getirmeyi amaçlamaktadır. Çözüm, "elektrik sağlama - enerji depolama - su sağ10/17/2025
Entegre Rüzgar-Güneş Hibrit Güç Çözümü Uzak Adalar İçinÖzetBu teklif, rüzgar enerjisi, güneş fotovoltaik enerji üretimi, pompalı hidro depolama ve deniz suyu tazlama teknolojilerini derin bir şekilde birleştiren yenilikçi entegre bir enerji çözümünü sunmaktadır. Uzak adaların karşılaştığı temel zorlukları, ağ kapsamının zorluğu, dizel enerji üretiminin yüksek maliyeti, geleneksel pillerin sınırlılığı ve tatlı su kaynaklarının azlığı gibi konulara sistemli bir şekilde çözüm getirmeyi amaçlamaktadır. Çözüm, "elektrik sağlama - enerji depolama - su sağ10/17/2025 -
 Akıllı Rüzgar-Güneş Hibrit Sistemi Fuzzy-PID Kontrol ile Geliştirilmiş Batarya Yönetimi ve MPPT içinÖzetBu teklif, gelişmiş kontrol teknolojisi temelinde bir rüzgar-güneş hibrit enerji üretim sistemi sunmaktadır ve uzak bölgelerin ve özel uygulama senaryolarının güç ihtiyaçlarını etkili ve ekonomik bir şekilde karşılamayı amaçlamaktadır. Sistemin çekirdeği, ATmega16 mikroişlemcisi merkezli bir akıllı kontrol sistemidir. Bu sistem, hem rüzgar hem de güneş enerjisi için Maksimum Güç Noktası İzleme (MPPT) gerçekleştirir ve pilin - ana bileşen - hassas ve etkili şarj/boşaltma yönetimini gerçekleşt10/17/2025
Akıllı Rüzgar-Güneş Hibrit Sistemi Fuzzy-PID Kontrol ile Geliştirilmiş Batarya Yönetimi ve MPPT içinÖzetBu teklif, gelişmiş kontrol teknolojisi temelinde bir rüzgar-güneş hibrit enerji üretim sistemi sunmaktadır ve uzak bölgelerin ve özel uygulama senaryolarının güç ihtiyaçlarını etkili ve ekonomik bir şekilde karşılamayı amaçlamaktadır. Sistemin çekirdeği, ATmega16 mikroişlemcisi merkezli bir akıllı kontrol sistemidir. Bu sistem, hem rüzgar hem de güneş enerjisi için Maksimum Güç Noktası İzleme (MPPT) gerçekleştirir ve pilin - ana bileşen - hassas ve etkili şarj/boşaltma yönetimini gerçekleşt10/17/2025 -
 Maliyet Etkin Rüzgar-Güneş Hibrit Çözümü: Buck-Boost Konvertör & Akıllı Şarj Sistemi Maliyetini AzaltırÖzetBu çözüm, yenilikçi yüksek verimli rüzgar-güneş hibrit güç üretim sistemini önermektedir. Mevcut teknolojilerin temel eksikliklerini ele alır - düşük enerji kullanımı, kısa pil ömrü ve zayıf sistem istikrarı - tamamen dijital kontrollü buck-boost DC/DC dönüştürücüler, ara sıra paralel teknoloji ve akıllı üç aşamalı şarj algoritması kullanılarak. Bu, daha geniş bir rüzgar hızı ve güneş ışığı aralığında Maksimum Güç Noktası Takibi (MPPT) sağlayarak, enerji yakalama verimliliğini önemli ölçüde10/17/2025
Maliyet Etkin Rüzgar-Güneş Hibrit Çözümü: Buck-Boost Konvertör & Akıllı Şarj Sistemi Maliyetini AzaltırÖzetBu çözüm, yenilikçi yüksek verimli rüzgar-güneş hibrit güç üretim sistemini önermektedir. Mevcut teknolojilerin temel eksikliklerini ele alır - düşük enerji kullanımı, kısa pil ömrü ve zayıf sistem istikrarı - tamamen dijital kontrollü buck-boost DC/DC dönüştürücüler, ara sıra paralel teknoloji ve akıllı üç aşamalı şarj algoritması kullanılarak. Bu, daha geniş bir rüzgar hızı ve güneş ışığı aralığında Maksimum Güç Noktası Takibi (MPPT) sağlayarak, enerji yakalama verimliliğini önemli ölçüde10/17/2025






