12ton AGV berat



Atribut utama
| Jenama | Wone Store |
| Nombor Model | 12ton AGV berat |
| Beban Terpilih | 12 ton |
| Siri | LY-AK-12T |
Penerangan produk daripada pembekal
Kaedah penggantungan AGV: spring, hidraulik
Laju pemanduan AGV: Laju AGV dalaman adalah 0-60m/min. Jika laju lebih tinggi, bergantung kepada situasi sebenar. Walau bagaimanapun, dengan mempertimbangkan persekitaran tapak bagi kebanyakan syarikat pengeluaran, keselamatan pekerja, dan berat beban semasa AGV beroperasi, disarankan bahawa laju tidak melebihi 30m/min. (20m/min untuk kenderaan piawai ultra-tipis dalam industri transformator) Seting laju maksimum kenderaan luaran adalah 5-10Km/H, dan laju maksimum kenderaan pelabuhan adalah 36Km/H. Dilengkapi dengan peranti pemindahan berterusan.
Kapasiti bateri: Yang biasa digunakan berkisar dari 50-1000AH (ampere-jam), yang dihitung berdasarkan kuasa motor/ukuran diameter roda/kemiringan pendakian/laju maksimum/masa tahan (kosong hingga kembali penuh/beban penuh). Pada masa ini, AGV 100 tan yang biasa digunakan mempunyai kapasiti bateri 96V300AH untuk 4 jam kosong dan beban penuh.
Sistem kuasa Langyu: sistem elektrik tulen, menggunakan bateri besi fosfat litium tanpa penyelenggaraan tahap automotif untuk output kuasa
Temperatur operasi bateri: piawaian normal mencadangkan temperatur operasi bateri -20° hingga 45° dan temperatur ekstrem -40° hingga 65° (dilengkapi dengan peranti pemanasan sendiri atau penyejuk udara). Temperatur pengcasan adalah di atas 0 darjah.
Kaedah pengcasan: pengcasan manual atau pengcasan automatik (apabila AGV secara automatik mendeteksi ia lebih rendah daripada nilai yang ditetapkan, ia akan bergerak secara automatik ke peranti pengcasan untuk pengcasan automatik), pengcasan automatik termasuk bekalan kuasa tanpa sentuhan, pengcasan ujian, dan pengcasan bawah.
Kaedah navigasi AGV utama termasuk:
1. Navigasi jalur magnetik
Serupa dengan panduan elektromagnetik, ia menggunakan jalur magnetik di permukaan jalan sebagai gantian untuk menanam wayar logam di bawah tanah, dan mewujudkan panduan melalui isyarat induksi magnetik. Ia mempunyai fleksibiliti yang lebih baik, lebih mudah untuk mengubah atau memperluaskan laluan, dan jalur magnetik mudah diletakkan, tetapi kaedah panduan ini mudah diganggu oleh bahan logam di sekitar lilitan, dan jalur magnetik mudah rosak oleh mesin, jadi kebolehpercayaan panduan sangat dipengaruhi oleh luaran.
2. Navigasi Laser SLAM
Panduan laser adalah dengan memasang reflektor laser yang tepat posisi di sekeliling laluan pemanduan AGV. AGV memancarkan sinar laser melalui pemindai laser dan mengumpulkan sinar laser yang dipantulkan oleh reflektor untuk menentukan kedudukan dan arah semasa, dan membimbing AGV melalui operasi geometri segitiga berterusan. Kelebihan terbesar teknologi ini adalah AGV boleh ditempatkan dengan tepat; tiada fasiliti penempatan lain diperlukan di atas tanah; laluan pemanduan boleh fleksibel dan sesuai dengan pelbagai persekitaran tapak. Ini adalah kaedah panduan canggih yang difavoritkan oleh banyak pembuat AGV asing; kekurangan adalah kos pembuatan tinggi, keperluan persekitaran agak keras (cahaya luar, keperluan tanah, keperluan kelihatan, dll.), dan tidak sesuai untuk penggunaan luaran (terutamanya sensitif terhadap hujan, salji, dan kabut).
3. Navigasi GNSS-GPS/Beidou.
Parameter asas
Jenis AGV: Pengangkutan belakang
Beban dinamakan KG: 12000 KG
Jisim kenderaan: 3000 KG
Mod pemanduan: Diferensial
Arah gerakan: Lurus ke depan dan ke belakang, ke kiri dan ke kanan, putaran di tempat
Kaedah navigasi: Jalur magnetik
Dimensi badan (panjang, lebar, dan tinggi) mm: 3400x1200x440
Cerobong tanah rangka mm: 35
Skenario penggunaan: Dalaman
Ketepatan penempatan mm: ±10mm
Ketepatan navigasi mm: ±10mm
Laju pemanduan kosong/beban penuh: 0-15
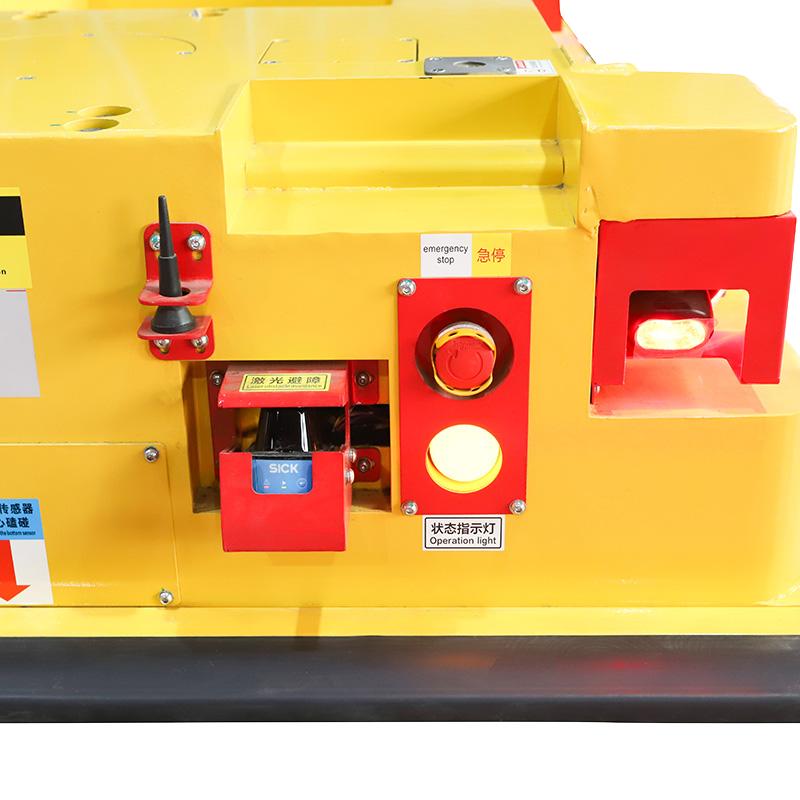
Perlindungan keselamatan: Sensor pengelakan rintangan laser + tepi selamat sentuh + alat isyarat bunyi dan cahaya + butang henti segera

Produk Berkaitan





Pengetahuan Berkaitan
-
 Kecelakaan Penjana Utama dan Isu Operasi Gas Ringan1. Rekod Kemalangan (19 Mac 2019)Pada pukul 16:13 pada 19 Mac 2019, latar belakang pemantauan melaporkan tindakan gas ringan bagi transformer utama No. 3. Mengikut Kod Operasi untuk Transformer Kuasa (DL/T572-2010), kakitangan operasi dan penyelenggaraan (O&M) telah memeriksa keadaan sebenar transformer utama No. 3.Pengesahan di tapak: Panel perlindungan bukan elektrik WBH bagi transformer utama No. 3 melaporkan tindakan gas ringan Fasa B badan transformer, dan reset tidak berkesan. Kakitang02/05/2026
Kecelakaan Penjana Utama dan Isu Operasi Gas Ringan1. Rekod Kemalangan (19 Mac 2019)Pada pukul 16:13 pada 19 Mac 2019, latar belakang pemantauan melaporkan tindakan gas ringan bagi transformer utama No. 3. Mengikut Kod Operasi untuk Transformer Kuasa (DL/T572-2010), kakitangan operasi dan penyelenggaraan (O&M) telah memeriksa keadaan sebenar transformer utama No. 3.Pengesahan di tapak: Panel perlindungan bukan elektrik WBH bagi transformer utama No. 3 melaporkan tindakan gas ringan Fasa B badan transformer, dan reset tidak berkesan. Kakitang02/05/2026 -
 Kesalahan dan Penanganan Pembumian Satu Fasa dalam Litar Pembahagian 10kVCiri-ciri dan Peranti Pengesan Kecacatan Tanah Fasa Tunggal1. Ciri-ciri Kecacatan Tanah Fasa TunggalIsyarat Amaran Pusat:Loceng amaran berbunyi, dan lampu penunjuk berlabel “Kecacatan Tanah pada Bahagian Bas [X] kV [Y]” menyala. Dalam sistem yang menggunakan gegelung Petersen (gegelung penekanan lengkung) untuk membumikan titik neutral, lampu penunjuk “Gegelung Petersen Beroperasi” juga menyala.Petunjuk Voltmeter Pemantauan Penebatan:Voltan fasa yang cacat menurun (dalam01/30/2026
Kesalahan dan Penanganan Pembumian Satu Fasa dalam Litar Pembahagian 10kVCiri-ciri dan Peranti Pengesan Kecacatan Tanah Fasa Tunggal1. Ciri-ciri Kecacatan Tanah Fasa TunggalIsyarat Amaran Pusat:Loceng amaran berbunyi, dan lampu penunjuk berlabel “Kecacatan Tanah pada Bahagian Bas [X] kV [Y]” menyala. Dalam sistem yang menggunakan gegelung Petersen (gegelung penekanan lengkung) untuk membumikan titik neutral, lampu penunjuk “Gegelung Petersen Beroperasi” juga menyala.Petunjuk Voltmeter Pemantauan Penebatan:Voltan fasa yang cacat menurun (dalam01/30/2026 -
 Mod pengendalian titik neutral untuk transformator grid elektrik 110kV~220kVSusunan mod pengendalian titik neutral untuk transformator grid elektrik 110kV~220kV harus memenuhi keperluan tahanan isolasi titik neutral transformator, dan juga berusaha untuk mengekalkan impedans sifar susunan stesen transformasi hampir tidak berubah, sambil memastikan bahawa impedans sifar menyeluruh pada mana-mana titik pendek rangkaian tidak melebihi tiga kali impedans positif menyeluruh.Untuk transformator 220kV dan 110kV dalam projek pembinaan baru dan penambahbaikan teknikal, mod penge01/29/2026
Mod pengendalian titik neutral untuk transformator grid elektrik 110kV~220kVSusunan mod pengendalian titik neutral untuk transformator grid elektrik 110kV~220kV harus memenuhi keperluan tahanan isolasi titik neutral transformator, dan juga berusaha untuk mengekalkan impedans sifar susunan stesen transformasi hampir tidak berubah, sambil memastikan bahawa impedans sifar menyeluruh pada mana-mana titik pendek rangkaian tidak melebihi tiga kali impedans positif menyeluruh.Untuk transformator 220kV dan 110kV dalam projek pembinaan baru dan penambahbaikan teknikal, mod penge01/29/2026 -
 Mengapa Stesen Transformasi Menggunakan Batu Kikir Batu Kuarza Kerikil dan Batu PecahMengapa Stesen Transformasi Menggunakan Batu Krikil, Kerikil, dan Batu Pecah?Dalam stesen transformasi, peralatan seperti transformer kuasa dan pengagihan, garis transmisi, transformer voltan, transformer arus, dan switch pemutus semua memerlukan grounding. Selain daripada grounding, kita akan kini mengkaji secara mendalam mengapa kerikil dan batu pecah sering digunakan dalam stesen transformasi. Walaupun kelihatan biasa, batu-batu ini memainkan peranan keselamatan dan fungsional yang penting.Da01/29/2026
Mengapa Stesen Transformasi Menggunakan Batu Kikir Batu Kuarza Kerikil dan Batu PecahMengapa Stesen Transformasi Menggunakan Batu Krikil, Kerikil, dan Batu Pecah?Dalam stesen transformasi, peralatan seperti transformer kuasa dan pengagihan, garis transmisi, transformer voltan, transformer arus, dan switch pemutus semua memerlukan grounding. Selain daripada grounding, kita akan kini mengkaji secara mendalam mengapa kerikil dan batu pecah sering digunakan dalam stesen transformasi. Walaupun kelihatan biasa, batu-batu ini memainkan peranan keselamatan dan fungsional yang penting.Da01/29/2026 -
 Mengapa Inti Transformator Hanya Boleh Di-grounding pada Satu Titik Saja? Bukankah Grounding Multi-Titik Lebih Handal?Mengapa Inti Transformator Perlu Ditanah?Semasa operasi, inti transformator, bersama dengan struktur logam, bahagian, dan komponen yang menetapkan inti dan lilitan, semuanya berada dalam medan elektrik yang kuat. Di bawah pengaruh medan elektrik ini, mereka memperoleh potensi yang relatif tinggi berbanding dengan tanah. Jika inti tidak ditanah, akan terdapat perbezaan potensial antara inti dan struktur pemampat yang ditanah serta tangki, yang mungkin menyebabkan peluruhan intermiten.Selain itu,01/29/2026
Mengapa Inti Transformator Hanya Boleh Di-grounding pada Satu Titik Saja? Bukankah Grounding Multi-Titik Lebih Handal?Mengapa Inti Transformator Perlu Ditanah?Semasa operasi, inti transformator, bersama dengan struktur logam, bahagian, dan komponen yang menetapkan inti dan lilitan, semuanya berada dalam medan elektrik yang kuat. Di bawah pengaruh medan elektrik ini, mereka memperoleh potensi yang relatif tinggi berbanding dengan tanah. Jika inti tidak ditanah, akan terdapat perbezaan potensial antara inti dan struktur pemampat yang ditanah serta tangki, yang mungkin menyebabkan peluruhan intermiten.Selain itu,01/29/2026 -
 Memahami Penyatuan Neutral TransformatorI. Apakah Titik Neutral?Dalam transformer dan jana elektrik, titik neutral adalah titik tertentu dalam lilitan di mana voltan mutlak antara titik ini dan setiap terminal luaran adalah sama. Dalam rajah di bawah, titikOmewakili titik neutral.II. Mengapa Titik Neutral Perlu Di-ground?Kaedah sambungan elektrik antara titik neutral dan bumi dalam sistem kuasa AC tiga fasa dipanggilkaedah grounding neutral. Kaedah grounding ini memberi kesan langsung kepada:Keamanan, kebolehpercayaan, dan ekonomi gri01/29/2026
Memahami Penyatuan Neutral TransformatorI. Apakah Titik Neutral?Dalam transformer dan jana elektrik, titik neutral adalah titik tertentu dalam lilitan di mana voltan mutlak antara titik ini dan setiap terminal luaran adalah sama. Dalam rajah di bawah, titikOmewakili titik neutral.II. Mengapa Titik Neutral Perlu Di-ground?Kaedah sambungan elektrik antara titik neutral dan bumi dalam sistem kuasa AC tiga fasa dipanggilkaedah grounding neutral. Kaedah grounding ini memberi kesan langsung kepada:Keamanan, kebolehpercayaan, dan ekonomi gri01/29/2026
Penyelesaian Berkaitan
-
 Penyelesaian Kuasa Hibrid Angin-Surya Terpadu untuk Pulau-Pulau TerpencilRingkasanCadangan ini memperkenalkan penyelesaian tenaga terpadu yang inovatif, yang menggabungkan secara mendalam penjanaan tenaga angin, penjanaan tenaga fotovoltaik, simpanan hidro pompa, dan teknologi penyulingan air laut. Ia bertujuan untuk menangani sistematik cabaran inti yang dihadapi oleh pulau-pulau terpencil, termasuk liputan grid yang sukar, kos tinggi penjanaan tenaga diesel, keterbatasan simpanan bateri tradisional, dan kekurangan sumber air tawar. Penyelesaian ini mencapai sinergi10/17/2025
Penyelesaian Kuasa Hibrid Angin-Surya Terpadu untuk Pulau-Pulau TerpencilRingkasanCadangan ini memperkenalkan penyelesaian tenaga terpadu yang inovatif, yang menggabungkan secara mendalam penjanaan tenaga angin, penjanaan tenaga fotovoltaik, simpanan hidro pompa, dan teknologi penyulingan air laut. Ia bertujuan untuk menangani sistematik cabaran inti yang dihadapi oleh pulau-pulau terpencil, termasuk liputan grid yang sukar, kos tinggi penjanaan tenaga diesel, keterbatasan simpanan bateri tradisional, dan kekurangan sumber air tawar. Penyelesaian ini mencapai sinergi10/17/2025 -
 Sistem Hibrid Angin-Surya Pintar dengan Kawalan Fuzzy-PID untuk Pengurusan Bateri yang Ditingkatkan dan MPPTRingkasanCadangan ini memperkenalkan sistem penjanaan kuasa hibrid angin-solar berdasarkan teknologi kawalan canggih, bertujuan untuk menangani keperluan kuasa di kawasan terpencil dan situasi aplikasi khas dengan cara yang efisien dan ekonomi. Inti sistem ini terletak pada sistem kawalan pintar yang berpusat pada mikropemproses ATmega16. Sistem ini melakukan Penjejakan Titik Kuasa Maksimum (MPPT) untuk kedua-dua tenaga angin dan solar, serta menggunakan algoritma yang dioptimumkan yang menggabu10/17/2025
Sistem Hibrid Angin-Surya Pintar dengan Kawalan Fuzzy-PID untuk Pengurusan Bateri yang Ditingkatkan dan MPPTRingkasanCadangan ini memperkenalkan sistem penjanaan kuasa hibrid angin-solar berdasarkan teknologi kawalan canggih, bertujuan untuk menangani keperluan kuasa di kawasan terpencil dan situasi aplikasi khas dengan cara yang efisien dan ekonomi. Inti sistem ini terletak pada sistem kawalan pintar yang berpusat pada mikropemproses ATmega16. Sistem ini melakukan Penjejakan Titik Kuasa Maksimum (MPPT) untuk kedua-dua tenaga angin dan solar, serta menggunakan algoritma yang dioptimumkan yang menggabu10/17/2025 -
 Penyelesaian Hibrid Angin-Surya Berkesan Kos: Penukar Buck-Boost & Penyediaan Cergas Mengurangkan Kos SistemRingkasanPenyelesaian ini mencadangkan sistem penjanaan tenaga hibrid angin-surya berkecekapan tinggi yang inovatif. Menangani kekurangan utama dalam teknologi sedia ada—seperti penggunaan tenaga yang rendah, umur bateri yang pendek, dan kestabilan sistem yang lemah—sistem ini menggunakan pemindah DC/DC buck-boost yang sepenuhnya dikawal secara digital, teknologi selari interlaced, dan algoritma pengisian tiga tahap pintar. Ini membolehkan Pelacakan Titik Kuasa Maksimum (MPPT) dalam julat kelaj10/17/2025
Penyelesaian Hibrid Angin-Surya Berkesan Kos: Penukar Buck-Boost & Penyediaan Cergas Mengurangkan Kos SistemRingkasanPenyelesaian ini mencadangkan sistem penjanaan tenaga hibrid angin-surya berkecekapan tinggi yang inovatif. Menangani kekurangan utama dalam teknologi sedia ada—seperti penggunaan tenaga yang rendah, umur bateri yang pendek, dan kestabilan sistem yang lemah—sistem ini menggunakan pemindah DC/DC buck-boost yang sepenuhnya dikawal secara digital, teknologi selari interlaced, dan algoritma pengisian tiga tahap pintar. Ini membolehkan Pelacakan Titik Kuasa Maksimum (MPPT) dalam julat kelaj10/17/2025






