آژیلو ۱۲ تنی سنگین



ویژگی های کلیدی
| برند | Wone Store |
| شماره مدل | آژیلو ۱۲ تنی سنگین |
| ظرفیت نامی | 12 ton |
| سری | LY-AK-12T |
توضیحات محصول از تامین کننده
روش تعلیق AGV: فنر، هیدرولیک
سرعت حرکت AGV: سرعت AGV داخل ساختمان 0-60 متر در دقیقه است. اگر سرعت بیشتر باشد، به شرایط واقعی بستگی دارد. با این حال، با توجه به محیط محلی کارخانههای تولیدی معمولی، ایمنی کارکنان و وزن بار در حین کار AGV، توصیه میشود که سرعت بیش از 30 متر در دقیقه نباشد. (برای خودروهای استاندارد بسیار لاغر در صنعت ترانسفورماتور 20 متر در دقیقه) تنظیم حداکثر سرعت خودروهای بیرون ساختمان 5-10 کیلومتر در ساعت و حداکثر سرعت خودروهای بندری 36 کیلومتر در ساعت است. تجهیز شده با دستگاه دنده پیوسته.
ظرفیت باتری: معمولاً بین 50-1000 آمپر ساعت (آمپر ساعت) متغیر است که بر اساس توان موتور/ قطر چرخ/ شیب بالا رفتن/ سرعت حداکثر/ زمان استقامت (از خالی تا پر و با بار) و دادههای دیگر محاسبه میشود. در حال حاضر، ظرفیت باتری AGV 100 تنی معمولاً 96V300AH برای 4 ساعت بدون بار و با بار است.
سیستم قدرت لنگیو: سیستم الکتریکی خالص، استفاده از باتریهای فسفر لیتیوم بدون نگهداری سطح خودرو برای تامین انرژی
دما عملیاتی باتری: استانداردهای عادی دماهای عملیاتی باتری را بین -20° تا 45° توصیه میکنند و دماهای حدی بین -40° تا 65° (تجهیز شده با دستگاه گرم کننده خودکار یا کولر). دمای شارژ بالای صفر درجه است.
روش شارژ: شارژ دستی یا خودکار (وقتی AGV به طور خودکار تشخیص میدهد که کمتر از مقدار تنظیم شده است، به طور خودکار به دستگاه شارژ حرکت میکند تا شارژ خودکار شود)، شارژ خودکار شامل تأمین انرژی بدون تماس، شارژ آزمایشی و شارژ از پایین.
روشهای ناوبری AGV عمدتاً شامل:
1. ناوبری نوار مغناطیسی
شبیه هدایت الکترومغناطیسی، از نوار مغناطیسی روی سطح جاده به جای دفن سیمهای فلزی زیر زمین استفاده میکند و از طریق سیگنالهای القایی مغناطیسی هدایت میکند. این روش انعطافپذیری بیشتری دارد، تغییر یا گسترش مسیر آسانتر است و نوار مغناطیسی ساده و آسان است برای نصب، اما این روش هدایت به آسانی توسط مواد فلزی اطراف مسیر مختل میشود و نوار مغناطیسی به آسانی توسط ماشینآلات آسیب میبیند، بنابراین قابلیت اطمینان هدایت به طور قابل توجهی تحت تأثیر محیط خارجی قرار میگیرد.
2. ناوبری SLAM لیزری
هدایت لیزری شامل نصب آینههای بازتابنده لیزر با موقعیت دقیق در اطراف مسیر حرکت AGV است. AGV از طریق اسکنر لیزری پرتوهای لیزری ارسال میکند و پرتوهای لیزری بازتابنده توسط آینهها را جمعآوری میکند تا موقعیت فعلی و سمت خود را تعیین کند و از طریق عملیات هندسی مثلثی مداوم AGV را هدایت میکند. بزرگترین مزیت این تکنولوژی این است که AGV میتواند به طور دقیق موقعیت یابی شود؛ نیازی به تأسیسات موقعیتیابی دیگری روی زمین نیست؛ مسیر حرکت میتواند انعطافپذیر و تطبیقپذیر با انواع محیطهای محلی باشد. این روش هدایت در حال حاضر روش پیشرفتهای است که توسط بسیاری از تولیدکنندگان AGV خارجی ترجیح داده میشود؛ معایب آن این است که هزینه ساخت بالاست، شرایط محیطی نسبتاً سختگیرانه (نور خارجی، شرایط زمین، نیاز به دید) و مناسب برای استفاده خارج از ساختمان نیست (به ویژه در برابر باران، برف و مه آسیبپذیر است).
3. ناوبری GNSS-GPS/بیدو.
پارامترهای پایه
نوع AGV: بلند کردن از عقب
بار مجاز کیلوگرم: 12000 کیلوگرم
جرم خودرو: 3000 کیلوگرم
روش محرک: دیفرانسیل
جهت حرکت: مستقیم جلو و عقب، چپ و راست، چرخش در محل
روش ناوبری: نوار مغناطیسی
ابعاد بدنه (طول، عرض و ارتفاع) میلیمتر: 3400x1200x440
فاصله زمین از بدنه میلیمتر: 35
محیط استفاده: داخل ساختمان
دقت موقعیتیابی میلیمتر: ±10 میلیمتر
دقت ناوبری میلیمتر: ±10 میلیمتر
سرعت حرکت بدون بار/با بار: 0-15
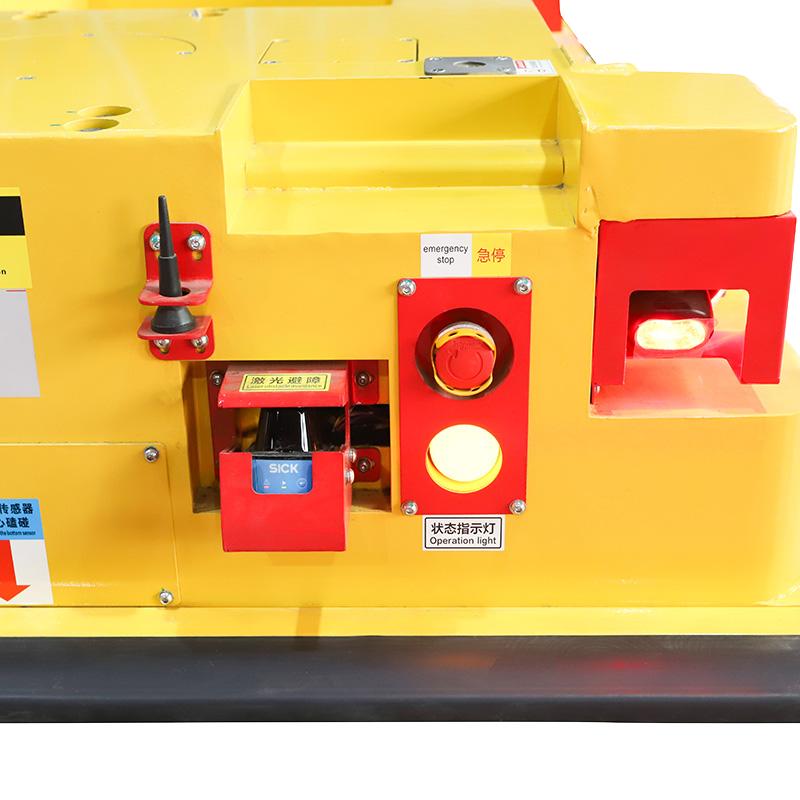
حفاظت ایمنی: سنسور دوربین لیزری اجتناب از موانع + لبه ایمنی + هشدار صوتی و نوری + دکمه توقف اضطراری

محصولات مرتبط





دانشهای مرتبط
-
 حوادث ترانسفورماتور اصلی و مشکلات عملیات گاز سبک۱. ضبط حادثه (۱۹ مارس ۲۰۱۹)در ساعت ۱۶:۱۳ روز ۱۹ مارس ۲۰۱۹، پشتیبانی نظارتی گزارش داد که تبدیلکننده اصلی شماره ۳ عملکرد گاز سبک داشته است. بر اساس کد عملیات تبدیلکنندههای قدرت (DL/T572-2010)، کارکنان عملیات و نگهداری (O&M) وضعیت محلی تبدیلکننده اصلی شماره ۳ را بررسی کردند.تأیید محلی: پانل محافظ غیر الکتریکی WBH تبدیلکننده اصلی شماره ۳ گزارش داد که جسم تبدیلکننده عملکرد گاز سبک فاز B داشته است و بازنشانی بیاثر بود. کارکنان O&M رله گاز فاز B و جعبه نمونهبرداری گاز تبدیلکننده اصلی ش02/05/2026
حوادث ترانسفورماتور اصلی و مشکلات عملیات گاز سبک۱. ضبط حادثه (۱۹ مارس ۲۰۱۹)در ساعت ۱۶:۱۳ روز ۱۹ مارس ۲۰۱۹، پشتیبانی نظارتی گزارش داد که تبدیلکننده اصلی شماره ۳ عملکرد گاز سبک داشته است. بر اساس کد عملیات تبدیلکنندههای قدرت (DL/T572-2010)، کارکنان عملیات و نگهداری (O&M) وضعیت محلی تبدیلکننده اصلی شماره ۳ را بررسی کردند.تأیید محلی: پانل محافظ غیر الکتریکی WBH تبدیلکننده اصلی شماره ۳ گزارش داد که جسم تبدیلکننده عملکرد گاز سبک فاز B داشته است و بازنشانی بیاثر بود. کارکنان O&M رله گاز فاز B و جعبه نمونهبرداری گاز تبدیلکننده اصلی ش02/05/2026 -
 عیوب و رفع آن در خطوط توزیع یک فازه ۱۰ کیلوولتویژگیها و ابزارهای تشخیص خطا در اتصال به زمین تکفاز۱. ویژگیهای خطاهای اتصال به زمین تکفازسیگنالهای هشدار مرکزی:زنگ هشدار به صدا درمیآید و چراغ نشانگر با برچسب «اتصال به زمین در بخش اتوبوس [X] کیلوولت [Y]» روشن میشود. در سیستمهایی که نقطه نوترال توسط سیمپیچ پترسن (سیمپیچ خاموشکننده قوس) به زمین متصل شده است، چراغ نشانگر «سیمپیچ پترسن فعال شده» نیز روشن میشود.نشانههای ولتمتر نظارت بر عایقبندی:ولتاژ فاز خرابشده کاهش مییابد (در مورد اتصال ناقص به زمین) یا به صفر میرسد (در مورد اتص01/30/2026
عیوب و رفع آن در خطوط توزیع یک فازه ۱۰ کیلوولتویژگیها و ابزارهای تشخیص خطا در اتصال به زمین تکفاز۱. ویژگیهای خطاهای اتصال به زمین تکفازسیگنالهای هشدار مرکزی:زنگ هشدار به صدا درمیآید و چراغ نشانگر با برچسب «اتصال به زمین در بخش اتوبوس [X] کیلوولت [Y]» روشن میشود. در سیستمهایی که نقطه نوترال توسط سیمپیچ پترسن (سیمپیچ خاموشکننده قوس) به زمین متصل شده است، چراغ نشانگر «سیمپیچ پترسن فعال شده» نیز روشن میشود.نشانههای ولتمتر نظارت بر عایقبندی:ولتاژ فاز خرابشده کاهش مییابد (در مورد اتصال ناقص به زمین) یا به صفر میرسد (در مورد اتص01/30/2026 -
 نحوه عمل زمین دادن نقطه محايد برای ترانسفورماتورهاي شبکه برق با ولتاژ ۱۱۰ کیلوولت تا ۲۲۰ کیلوولتروشهای عملیاتی زمینکشی نقطه محايد ترانسفورماتورها در شبکههای برق ۱۱۰ کیلوولت تا ۲۲۰ کیلوولت باید نیازهای تحمل دی الکتریکی نقاط محايد ترانسفورماتورها را برآورده کنند و همچنین باید سعی شود که امپدانس صفری ایستگاههای تغییر ولتاژ به طور اساسی ثابت بماند، در حالی که اطمینان حاصل شود که امپدانس جامع صفری در هر نقطه خرابی در سیستم بیش از سه برابر امپدانس جامع مثبت نباشد.برای ترانسفورماتورهای ۲۲۰ کیلوولت و ۱۱۰ کیلوولت در پروژههای ساخت و ساز جدید و پروژههای تکنولوژیکی، روشهای زمینکشی نقطه محايد آ01/29/2026
نحوه عمل زمین دادن نقطه محايد برای ترانسفورماتورهاي شبکه برق با ولتاژ ۱۱۰ کیلوولت تا ۲۲۰ کیلوولتروشهای عملیاتی زمینکشی نقطه محايد ترانسفورماتورها در شبکههای برق ۱۱۰ کیلوولت تا ۲۲۰ کیلوولت باید نیازهای تحمل دی الکتریکی نقاط محايد ترانسفورماتورها را برآورده کنند و همچنین باید سعی شود که امپدانس صفری ایستگاههای تغییر ولتاژ به طور اساسی ثابت بماند، در حالی که اطمینان حاصل شود که امپدانس جامع صفری در هر نقطه خرابی در سیستم بیش از سه برابر امپدانس جامع مثبت نباشد.برای ترانسفورماتورهای ۲۲۰ کیلوولت و ۱۱۰ کیلوولت در پروژههای ساخت و ساز جدید و پروژههای تکنولوژیکی، روشهای زمینکشی نقطه محايد آ01/29/2026 -
 چرا زیرстанیشنها سنگ، شن، دانهسنگ و سنگ خردشده را میپذیرند؟ایستگاههای فرعی چرا از سنگها، شن، حصیر و سنگهای خردشده استفاده میکنند؟در ایستگاههای فرعی، تجهیزاتی مانند ترانسفورماتورهای قدرت و توزیع، خطوط انتقال، ترانسفورماتورهای ولتاژ، ترانسفورماتورهای جریان و کلیدهای جداکننده همگی نیازمند اتصال به زمین هستند. علاوه بر اتصال به زمین، در اینجا بهطور عمیقتر بررسی میکنیم که چرا شن و سنگهای خردشده بهطور رایج در ایستگاههای فرعی بهکار میروند. اگرچه این سنگها ظاهری عادی دارند، اما نقش حیاتی ایمنی و عملکردی ایفا میکنند.در طراحی اتصال به زمین ایستگاه01/29/2026
چرا زیرстанیشنها سنگ، شن، دانهسنگ و سنگ خردشده را میپذیرند؟ایستگاههای فرعی چرا از سنگها، شن، حصیر و سنگهای خردشده استفاده میکنند؟در ایستگاههای فرعی، تجهیزاتی مانند ترانسفورماتورهای قدرت و توزیع، خطوط انتقال، ترانسفورماتورهای ولتاژ، ترانسفورماتورهای جریان و کلیدهای جداکننده همگی نیازمند اتصال به زمین هستند. علاوه بر اتصال به زمین، در اینجا بهطور عمیقتر بررسی میکنیم که چرا شن و سنگهای خردشده بهطور رایج در ایستگاههای فرعی بهکار میروند. اگرچه این سنگها ظاهری عادی دارند، اما نقش حیاتی ایمنی و عملکردی ایفا میکنند.در طراحی اتصال به زمین ایستگاه01/29/2026 -
 چرا باید هسته ترانسفورماتور فقط در یک نقطه به زمین متصل شود؟ آیا متصل کردن چند نقطهای مطمئنتر نیست؟چرا باید هسته ترانسفورماتور به زمین متصل شود؟در حین عملکرد، هسته ترانسفورماتور، همراه با ساختارهای فلزی، قطعات و اجزایی که هسته و پیچهها را ثابت میکنند، در یک میدان الکتریکی قوی قرار دارند. تحت تأثیر این میدان الکتریکی، آنها نسبت به زمین پتانسیل نسبتاً بالایی کسب میکنند. اگر هسته به زمین متصل نشود، اختلاف پتانسیل بین هسته و ساختارهای ضبطکننده و ظرف موجود خواهد بود که ممکن است منجر به تخلیه نامنظم شود.علاوه بر این، در حین عملکرد، یک میدان مغناطیسی قوی پیچهها را احاطه میکند. هسته و ساختارهای01/29/2026
چرا باید هسته ترانسفورماتور فقط در یک نقطه به زمین متصل شود؟ آیا متصل کردن چند نقطهای مطمئنتر نیست؟چرا باید هسته ترانسفورماتور به زمین متصل شود؟در حین عملکرد، هسته ترانسفورماتور، همراه با ساختارهای فلزی، قطعات و اجزایی که هسته و پیچهها را ثابت میکنند، در یک میدان الکتریکی قوی قرار دارند. تحت تأثیر این میدان الکتریکی، آنها نسبت به زمین پتانسیل نسبتاً بالایی کسب میکنند. اگر هسته به زمین متصل نشود، اختلاف پتانسیل بین هسته و ساختارهای ضبطکننده و ظرف موجود خواهد بود که ممکن است منجر به تخلیه نامنظم شود.علاوه بر این، در حین عملکرد، یک میدان مغناطیسی قوی پیچهها را احاطه میکند. هسته و ساختارهای01/29/2026 -
 درک زمینبندی میانگین ترانسفورماتورI. نقطه خنثی چیست؟در ترانسفورماتورها و ژنراتورها، نقطه خنثی نقطهای خاص در پیچش است که ولتاژ مطلق بین این نقطه و هر ترمینال خارجی یکسان است. در نمودار زیر، نقطهOنقطه خنثی را نشان میدهد.II. چرا نقطه خنثی به زمین کشیدن نیاز دارد؟روش اتصال الکتریکی بین نقطه خنثی و زمین در سیستم قدرت جریان متناوب سهفازی بهروش زمین کشیدن نقطه خنثیمشهور است. این روش زمین کشیدن مستقیماً بر:امنیت، قابلیت اطمینان و اقتصادی بودن شبکه قدرت؛انتخاب سطح عایقبندی تجهیزات سیستم؛سطح ولتاژهای فراگذر؛طرحهای حفاظت رلهای؛تشویش01/29/2026
درک زمینبندی میانگین ترانسفورماتورI. نقطه خنثی چیست؟در ترانسفورماتورها و ژنراتورها، نقطه خنثی نقطهای خاص در پیچش است که ولتاژ مطلق بین این نقطه و هر ترمینال خارجی یکسان است. در نمودار زیر، نقطهOنقطه خنثی را نشان میدهد.II. چرا نقطه خنثی به زمین کشیدن نیاز دارد؟روش اتصال الکتریکی بین نقطه خنثی و زمین در سیستم قدرت جریان متناوب سهفازی بهروش زمین کشیدن نقطه خنثیمشهور است. این روش زمین کشیدن مستقیماً بر:امنیت، قابلیت اطمینان و اقتصادی بودن شبکه قدرت؛انتخاب سطح عایقبندی تجهیزات سیستم؛سطح ولتاژهای فراگذر؛طرحهای حفاظت رلهای؛تشویش01/29/2026
راه حل های مرتبط
-
 راهحل ترکیبی باد-آفتاب برای جزایر دورافتادهچکیدهاین پیشنهاد یک راهحل انرژی یکپارچه نوآورانه را ارائه میدهد که به طور عمیق توان بادی، تولید برق فتوولتائیک، ذخیرهسازی هیدرو پمپ و تکنولوژیهای تصفیه آب دریا را ترکیب میکند. این راهحل هدف دارد به طور سیستماتیک چالشهای اصلی موجود در جزایر دورافتاده، از جمله پوشش شبکه برق مشکلبار، هزینههای بالای تولید برق با گازروی، محدودیتهای ذخیرهسازی با باتریهای سنتی و کمبود منابع آب شیرین را برطرف کند. این راهحل هماهنگی و خودکفایی را در "تامین برق - ذخیرهسازی انرژی - تأمین آب" ایجاد میکند و یک10/17/2025
راهحل ترکیبی باد-آفتاب برای جزایر دورافتادهچکیدهاین پیشنهاد یک راهحل انرژی یکپارچه نوآورانه را ارائه میدهد که به طور عمیق توان بادی، تولید برق فتوولتائیک، ذخیرهسازی هیدرو پمپ و تکنولوژیهای تصفیه آب دریا را ترکیب میکند. این راهحل هدف دارد به طور سیستماتیک چالشهای اصلی موجود در جزایر دورافتاده، از جمله پوشش شبکه برق مشکلبار، هزینههای بالای تولید برق با گازروی، محدودیتهای ذخیرهسازی با باتریهای سنتی و کمبود منابع آب شیرین را برطرف کند. این راهحل هماهنگی و خودکفایی را در "تامین برق - ذخیرهسازی انرژی - تأمین آب" ایجاد میکند و یک10/17/2025 -
 سیستم هیبریدی هوشمند باد-خورشید با کنترل فازی-PID برای بهبود مدیریت باتری و MPPTچکیدهاین پیشنهاد یک سیستم تولید برق هیبریدی باد-خورشیدی بر اساس فناوری کنترل پیشرفته را مطرح میکند که هدف آن به طور موثر و اقتصادی برآوردن نیازهای انرژی مناطق دورافتاده و سناریوهای کاربردی خاص است. قلب این سیستم یک سیستم کنترل هوشمند با مرکزیت میکروپروسسور ATmega16 است. این سیستم تعقیب نقطه توان بیشینه (MPPT) برای هر دو منبع باد و خورشیدی را انجام میدهد و از الگوریتم بهینه شده ترکیبی PID و کنترل فازی برای مدیریت دقیق و کارآمد شارژ/دشارژ مؤلفه کلیدی - باتری - استفاده میکند. بنابراین، به طور ق10/17/2025
سیستم هیبریدی هوشمند باد-خورشید با کنترل فازی-PID برای بهبود مدیریت باتری و MPPTچکیدهاین پیشنهاد یک سیستم تولید برق هیبریدی باد-خورشیدی بر اساس فناوری کنترل پیشرفته را مطرح میکند که هدف آن به طور موثر و اقتصادی برآوردن نیازهای انرژی مناطق دورافتاده و سناریوهای کاربردی خاص است. قلب این سیستم یک سیستم کنترل هوشمند با مرکزیت میکروپروسسور ATmega16 است. این سیستم تعقیب نقطه توان بیشینه (MPPT) برای هر دو منبع باد و خورشیدی را انجام میدهد و از الگوریتم بهینه شده ترکیبی PID و کنترل فازی برای مدیریت دقیق و کارآمد شارژ/دشارژ مؤلفه کلیدی - باتری - استفاده میکند. بنابراین، به طور ق10/17/2025 -
 راهحل هیبریدی باد-خورشید با قیمت مناسب: کنورتر باک-بوست و شارژ هوشمند کاهش میزان هزینه سیستمچکیدهاین راهحل یک سیستم تولید انرژی هیبریدی باد-آفتاب با کارایی بالا پیشنهاد میدهد. با برخورد به نقصهای اساسی در فناوریهای موجود، مانند استفاده پایین از انرژی، عمر کوتاه باتری و پایداری ضعیف سیستم، این سیستم از تبدیلکنندههای DC/DC باک-بوست کاملاً دیجیتال، فناوری موازی شدن متقاطع و الگوریتم شارژ سه مرحلهای هوشمند استفاده میکند. این امکان را میدهد که ردیابی نقطه قدرت حداکثر (MPPT) در محدوده گستردهتری از سرعتهای باد و تابش خورشیدی صورت گیرد، که به طور قابل توجهی کارایی جذب انرژی را بهبود10/17/2025
راهحل هیبریدی باد-خورشید با قیمت مناسب: کنورتر باک-بوست و شارژ هوشمند کاهش میزان هزینه سیستمچکیدهاین راهحل یک سیستم تولید انرژی هیبریدی باد-آفتاب با کارایی بالا پیشنهاد میدهد. با برخورد به نقصهای اساسی در فناوریهای موجود، مانند استفاده پایین از انرژی، عمر کوتاه باتری و پایداری ضعیف سیستم، این سیستم از تبدیلکنندههای DC/DC باک-بوست کاملاً دیجیتال، فناوری موازی شدن متقاطع و الگوریتم شارژ سه مرحلهای هوشمند استفاده میکند. این امکان را میدهد که ردیابی نقطه قدرت حداکثر (MPPT) در محدوده گستردهتری از سرعتهای باد و تابش خورشیدی صورت گیرد، که به طور قابل توجهی کارایی جذب انرژی را بهبود10/17/2025






