12 طن روبوت نقل آلي للحمل الثقيل



السمات الرئيسية
| العلامة التجارية | Wone Store |
| رقم النموذج | 12 طن روبوت نقل آلي للحمل الثقيل |
| الحمولة القصوى | 12 ton |
| سلسلة | LY-AK-12T |
وصف المنتج من المورد
طريقة التعليق AGV: ربيع، هيدروليكي
سرعة قيادة AGV: سرعة AGV الداخلية هي 0-60 م/د. إذا كانت السرعة أعلى، فهذا يعتمد على الوضع الفعلي. ومع ذلك، بالنظر إلى بيئة الموقع للشركات الإنتاجية العامة وأمان الأفراد وزن الحمل عند عمل AGV، يُنصح بأن لا تتجاوز السرعة 30 م/د. (20 م/د لسيارات المعايير الرقيقة جدا في صناعة المحولات) الإعداد الأقصى للسرعة للمركبات الخارجية هو 5-10 كم/ساعة، والسرعة القصوى للمركبات في الموانئ هي 36 كم/ساعة. مجهزة بجهاز نقل متغير بشكل مستمر.
سعة البطارية: تتراوح الأكثر استخداماً بين 50-1000 أمبير ساعة (أ.ح)، والتي يتم حسابها بناءً على قوة المحرك/حجم عجلة الدوران/منحدر الصعود/السرعة القصوى/وقت التحمل (فارغ حتى العودة الكاملة/تحميل كامل). حالياً، تبلغ سعة البطارية لـ AGV التي تزن 100 طن 96V300AH لمدة 4 ساعات من التحميل الفارغ والكامل.
نظام الطاقة Langyu: نظام كهربائي خالص، يستخدم بطاريات الليثيوم الفوسفات الحديدية من مستوى السيارات بدون صيانة لإخراج الطاقة
درجة حرارة تشغيل البطارية: يوصى بمعايير عادية بأن تكون درجة حرارة تشغيل البطارية بين -20° و 45° ودرجات الحرارة القصوى بين -40° و 65° (مزودة بجهاز تسخين ذاتي أو تكييف). درجة حرارة الشحن فوق الصفر.
طريقة الشحن: شحن يدوي أو شحن آلي (عندما يكتشف AGV تلقائياً أنه أقل من القيمة المحددة، سيقوم بالتوجه تلقائياً إلى جهاز الشحن للشحن الآلي)، ويشمل الشحن الآلي تزويد الطاقة بدون اتصال، شحن الاختبار، والشحن السفلي.
تشمل طرق التنقل AGV الرئيسية:
1. التنقل بواسطة الشريط المغناطيسي
مشابهة للتوجيه الكهرومغناطيسي، ولكنها تستخدم شريط مغناطيسي على سطح الطريق بدلاً من دفن أسلاك معدنية تحت الأرض، وتتحقق التوجيه عبر إشارات الاستشعار المغناطيسي. لديها مرونة أفضل، من السهل تغيير أو توسيع المسار، والشريط المغناطيسي بسيط وسهل التركيب، ولكن هذه طريقة التوجيه تتأثر بسهولة بالمواد المعدنية المحيطة بالحلقة، ويمكن أن يتعرض الشريط المغناطيسي للتلف من قبل الآلات، لذا فإن موثوقية التوجيه تتأثر بشكل كبير بالعالم الخارجي.
2. التنقل بواسطة ليزر SLAM
التوجيه بالليزر يعني تركيب مرآت ليزر موضعها بدقة حول مسار قيادة AGV. يصدر AGV أشعة ليزر عبر ماسح ليزري ويجمع الأشعة المنعكسة من المرآت ليحدد موقعه الحالي والتوجه، ويوجه AGV عبر عمليات الهندسة المثلثية المستمرة. أكبر ميزة لهذه التقنية هي أن AGV يمكن وضعه بدقة؛ لا حاجة لأي مرافق تحديد مواقع أخرى على الأرض؛ يمكن أن يكون مسار القيادة مرنًا ومتكيفًا مع مجموعة متنوعة من بيئات الموقع. إنه حاليًا طريقة التوجيه المتقدمة المفضلة لدى العديد من الشركات المصنعة لـ AGV الأجنبية؛ العيب هو أن تكلفة التصنيع عالية، والمتطلبات البيئية صعبة نسبياً (ضوء خارجي، متطلبات الأرض، متطلبات الرؤية، الخ)، ولا تناسب الاستخدام الخارجي (خاصة الحساسية للمطر والثلوج والضباب).
3. التنقل بواسطة GNSS-GPS/بيدو.
المعلمات الأساسية
نوع AGV: رفع من الخلف
الحمل المقنن KG: 12000 KG
كتلة المركبة: 3000 KG
طريقة القيادة: تفاضلية
اتجاه الحركة: للأمام وللخلف، يمين ويسار، الدوران في مكانه
طريقة التنقل: الشريط المغناطيسي
أبعاد الجسم (الطول، العرض، والارتفاع) مم: 3400x1200x440
مسافة الأرض من القاع مم: 35
سيناريو الاستخدام: داخلي
دقة التوضع مم: ±10مم
دقة التنقل مم: ±10مم
سرعة القيادة فارغة/محملة: 0-15
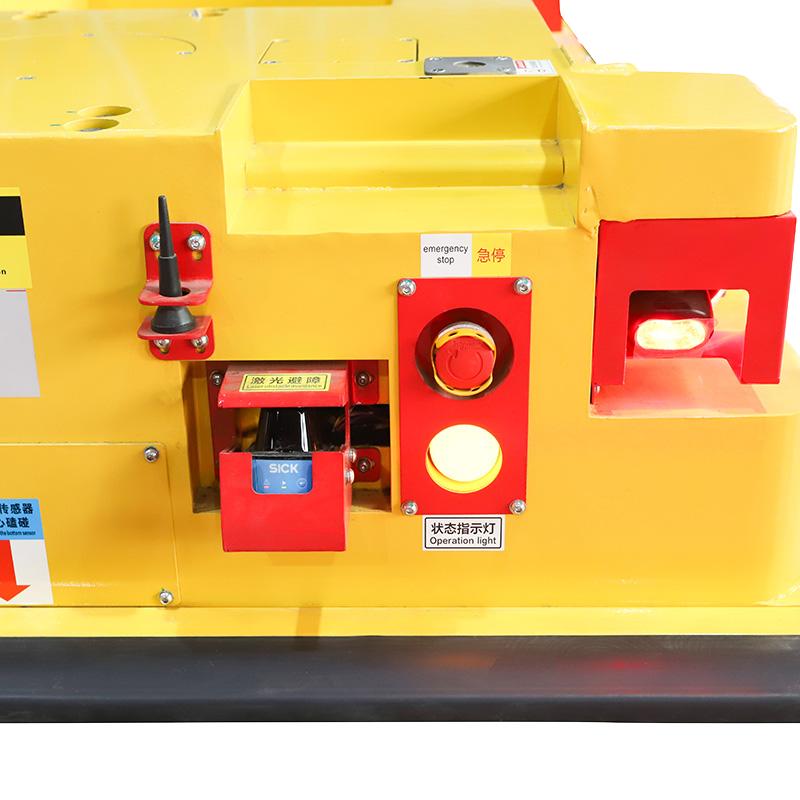
الحماية الأمنية: مستشعر تجنب العقبات بالليزر + لمسة حواف الأمان + إنذار صوتي وبصري + زر التوقف الطارئ

المنتجات ذات الصلة





المعرفات ذات الصلة
-
 حوادث المحولات الرئيسية ومشكلات تشغيل الغاز الخفيف١. سجل الحادث (١٩ مارس ٢٠١٩)في الساعة ١٦:١٣ من يوم ١٩ مارس ٢٠١٩، أبلغت خلفية المراقبة عن تفعيل غاز خفيف في المحول الرئيسي رقم ٣. ووفقاً لـ«كود تشغيل المحولات الكهربائية» (DL/T572-2010)، قام موظفو التشغيل والصيانة (O&M) بفحص الحالة الميدانية للمحول الرئيسي رقم ٣.التأكيد الميداني: أبلغ لوحة حماية المحول غير الكهربائية WBH الخاصة بالمحول الرئيسي رقم ٣ عن تفعيل الغاز الخفيف في الطور باء للجسم الرئيسي للمحول، وبقيت عملية إعادة التعيين غير فعّالة. وقام موظفو التشغيل والصيانة (O&M) بفحص جهاز تج02/05/2026
حوادث المحولات الرئيسية ومشكلات تشغيل الغاز الخفيف١. سجل الحادث (١٩ مارس ٢٠١٩)في الساعة ١٦:١٣ من يوم ١٩ مارس ٢٠١٩، أبلغت خلفية المراقبة عن تفعيل غاز خفيف في المحول الرئيسي رقم ٣. ووفقاً لـ«كود تشغيل المحولات الكهربائية» (DL/T572-2010)، قام موظفو التشغيل والصيانة (O&M) بفحص الحالة الميدانية للمحول الرئيسي رقم ٣.التأكيد الميداني: أبلغ لوحة حماية المحول غير الكهربائية WBH الخاصة بالمحول الرئيسي رقم ٣ عن تفعيل الغاز الخفيف في الطور باء للجسم الرئيسي للمحول، وبقيت عملية إعادة التعيين غير فعّالة. وقام موظفو التشغيل والصيانة (O&M) بفحص جهاز تج02/05/2026 -
 أعطال وإصلاحات التأريض الأحادي الطور في خطوط توزيع 10 كيلوفولتخصائص أعطال الأرضية أحادية الطور وأجهزة كشفها١. خصائص أعطال الأرضية أحادية الطورإشارات الإنذار المركزية:يُصدر جرس التحذير صوتًا، وتضيء مصباح المؤشر المسمى «عطل أرضي في قسم الحافلة [X] كيلوفولت رقم [Y]». وفي الأنظمة التي يُوصَل فيها نقطة التحييد عبر ملف بيترسن (ملف إخماد القوس الكهربائي)، يضيء مؤشر «تشغيل ملف بيترسن» أيضًا.مؤشرات جهاز مراقبة العزل الفولتمتري:ينخفض جهد الطور المعطّل (في حالة الأرضية غير الصلبة) أو ينعدم تمامًا (في حالة الأرضية الصلبة).يرتفع جهد الطورين الآخرين — فوق جهد الطور الطب01/30/2026
أعطال وإصلاحات التأريض الأحادي الطور في خطوط توزيع 10 كيلوفولتخصائص أعطال الأرضية أحادية الطور وأجهزة كشفها١. خصائص أعطال الأرضية أحادية الطورإشارات الإنذار المركزية:يُصدر جرس التحذير صوتًا، وتضيء مصباح المؤشر المسمى «عطل أرضي في قسم الحافلة [X] كيلوفولت رقم [Y]». وفي الأنظمة التي يُوصَل فيها نقطة التحييد عبر ملف بيترسن (ملف إخماد القوس الكهربائي)، يضيء مؤشر «تشغيل ملف بيترسن» أيضًا.مؤشرات جهاز مراقبة العزل الفولتمتري:ينخفض جهد الطور المعطّل (في حالة الأرضية غير الصلبة) أو ينعدم تمامًا (في حالة الأرضية الصلبة).يرتفع جهد الطورين الآخرين — فوق جهد الطور الطب01/30/2026 -
 طريقة تشغيل توصيل نقطة المحايد لمحولات شبكة الكهرباء بجهد 110 كيلوفولت إلى 220 كيلوفولتيجب أن تلبي طرق توصيل نقطة المحايد للأرض في محولات شبكة الكهرباء بجهد 110 كيلو فولت إلى 220 كيلو فولت متطلبات تحمل العزل لنقطة المحايد في المحولات، وأن تسعى جاهدة للحفاظ على ثبات ممانعة التسلسل الصفرية للمحطة تقريباً، مع ضمان ألا تتعدى الممانعة الشاملة للتسلسل الصفرية في أي نقطة قصر في النظام ثلاثة أضعاف الممانعة الشاملة للتسلسل الإيجابي.بالنسبة لمحولات 220 كيلو فولت و110 كيلو فولت في المشاريع الجديدة وإعادة التطوير التقني، يجب أن تلتزم طرق توصيل نقطة المحايد للأرض بما يلي:1. المحولات ذاتية التح01/29/2026
طريقة تشغيل توصيل نقطة المحايد لمحولات شبكة الكهرباء بجهد 110 كيلوفولت إلى 220 كيلوفولتيجب أن تلبي طرق توصيل نقطة المحايد للأرض في محولات شبكة الكهرباء بجهد 110 كيلو فولت إلى 220 كيلو فولت متطلبات تحمل العزل لنقطة المحايد في المحولات، وأن تسعى جاهدة للحفاظ على ثبات ممانعة التسلسل الصفرية للمحطة تقريباً، مع ضمان ألا تتعدى الممانعة الشاملة للتسلسل الصفرية في أي نقطة قصر في النظام ثلاثة أضعاف الممانعة الشاملة للتسلسل الإيجابي.بالنسبة لمحولات 220 كيلو فولت و110 كيلو فولت في المشاريع الجديدة وإعادة التطوير التقني، يجب أن تلتزم طرق توصيل نقطة المحايد للأرض بما يلي:1. المحولات ذاتية التح01/29/2026 -
 لماذا تستخدم المحطات الفرعية الصخور والحصى والرمال والحجارة المكسرةلماذا تستخدم المحطات الفرعية الحجارة والرمل والحصى والحجارة المكسرة؟في المحطات الفرعية، تتطلب المعدات مثل محولات الطاقة والتوزيع وخطوط النقل ومحولات الجهد ومحولات التيار ومفاتيح العزل التأريض. وبجانب التأريض، سنستعرض الآن بالتفصيل السبب وراء الاستخدام الشائع للرمل والحجارة المكسرة في المحطات الفرعية. وعلى الرغم من مظهرها العادي، فإن هذه الحجارة تؤدي دورًا حيويًّا من حيث السلامة والوظيفة.وفي تصميم نظام تأريض المحطة الفرعية — لا سيما عند تطبيق عدة طرق للتأريض — تُفرش الحجارة المكسرة أو الرمل عبر س01/29/2026
لماذا تستخدم المحطات الفرعية الصخور والحصى والرمال والحجارة المكسرةلماذا تستخدم المحطات الفرعية الحجارة والرمل والحصى والحجارة المكسرة؟في المحطات الفرعية، تتطلب المعدات مثل محولات الطاقة والتوزيع وخطوط النقل ومحولات الجهد ومحولات التيار ومفاتيح العزل التأريض. وبجانب التأريض، سنستعرض الآن بالتفصيل السبب وراء الاستخدام الشائع للرمل والحجارة المكسرة في المحطات الفرعية. وعلى الرغم من مظهرها العادي، فإن هذه الحجارة تؤدي دورًا حيويًّا من حيث السلامة والوظيفة.وفي تصميم نظام تأريض المحطة الفرعية — لا سيما عند تطبيق عدة طرق للتأريض — تُفرش الحجارة المكسرة أو الرمل عبر س01/29/2026 -
 لماذا يجب تأريض لب المحول في نقطة واحدة فقط؟ أليس التأريض متعدد النقاط أكثر موثوقية؟لماذا يجب تأريض قلب المحول؟خلال التشغيل، يقع قلب المحول بالإضافة إلى الهياكل والقطع المعدنية التي تثبت القلب واللفائف في مجال كهربائي قوي. تحت تأثير هذا المجال الكهربائي، يكتسبون جهدًا نسبيًا مرتفعًا بالنسبة للأرض. إذا لم يتم تأريض القلب، سيكون هناك فرق جهد بين القلب والهياكل الضاغطة والأسطوانة الأرضية، مما قد يؤدي إلى تفريغ متقطع.بالإضافة إلى ذلك، خلال التشغيل، يوجد مجال مغناطيسي قوي يحيط باللفائف. القلب والهياكل المعدنية المختلفة والقطع والمركبات موجودة في مجال مغناطيسي غير متجانس، وتبعد مسافا01/29/2026
لماذا يجب تأريض لب المحول في نقطة واحدة فقط؟ أليس التأريض متعدد النقاط أكثر موثوقية؟لماذا يجب تأريض قلب المحول؟خلال التشغيل، يقع قلب المحول بالإضافة إلى الهياكل والقطع المعدنية التي تثبت القلب واللفائف في مجال كهربائي قوي. تحت تأثير هذا المجال الكهربائي، يكتسبون جهدًا نسبيًا مرتفعًا بالنسبة للأرض. إذا لم يتم تأريض القلب، سيكون هناك فرق جهد بين القلب والهياكل الضاغطة والأسطوانة الأرضية، مما قد يؤدي إلى تفريغ متقطع.بالإضافة إلى ذلك، خلال التشغيل، يوجد مجال مغناطيسي قوي يحيط باللفائف. القلب والهياكل المعدنية المختلفة والقطع والمركبات موجودة في مجال مغناطيسي غير متجانس، وتبعد مسافا01/29/2026 -
 فهم توصيل المحول بالأرضأولاً: ما هو النقطة المحايدة؟في المحولات والمولدات، تُعَرَّف النقطة المحايدة على أنها نقطة محددة في اللفافة يكون فيها الجهد المطلق بين هذه النقطة وكل طرف خارجي متساوياً. وفي المخطط أدناه، تمثِّل النقطةOالنقطة المحايدة.ثانياً: لماذا يجب تأريض النقطة المحايدة؟تُسمَّى طريقة الاتصال الكهربائي بين النقطة المحايدة والأرض في نظام الطاقة المتناوبة ثلاثي الأطوار بـ«طريقة تأريض النقطة المحايدة». وتؤثر هذه الطريقة في ما يلي بشكل مباشر:سلامة وموثوقية وكفاءة الشبكة الكهربائية من حيث التكلفة؛اختيار مستويات ال01/29/2026
فهم توصيل المحول بالأرضأولاً: ما هو النقطة المحايدة؟في المحولات والمولدات، تُعَرَّف النقطة المحايدة على أنها نقطة محددة في اللفافة يكون فيها الجهد المطلق بين هذه النقطة وكل طرف خارجي متساوياً. وفي المخطط أدناه، تمثِّل النقطةOالنقطة المحايدة.ثانياً: لماذا يجب تأريض النقطة المحايدة؟تُسمَّى طريقة الاتصال الكهربائي بين النقطة المحايدة والأرض في نظام الطاقة المتناوبة ثلاثي الأطوار بـ«طريقة تأريض النقطة المحايدة». وتؤثر هذه الطريقة في ما يلي بشكل مباشر:سلامة وموثوقية وكفاءة الشبكة الكهربائية من حيث التكلفة؛اختيار مستويات ال01/29/2026
الحلول ذات الصلة
-
 الحل المتكامل للطاقة الهجينة من الرياح والشمس للجزر النائيةملخصتقدم هذه المقترح حلًا متكاملًا للطاقة مبتكرًا يجمع بشكل عميق بين طاقة الرياح وتوليد الكهرباء من الطاقة الشمسية وخزن الطاقة بالضخ ومعالجة تحلية مياه البحر. يهدف إلى معالجة التحديات الأساسية التي تواجه الجزر النائية، بما في ذلك صعوبة تغطية الشبكة وتكلفة توليد الكهرباء من الديزل العالية وقيود تخزين البطاريات التقليدية وندرة الموارد المائية العذبة. يحقق الحل التناغم والاستقلالية في "توفير الطاقة - تخزين الطاقة - توفير المياه"، مما يوفر مسارًا تقنيًا موثوقًا به واقتصاديًا وصديقًا للبيئة لتنمية ال10/17/2025
الحل المتكامل للطاقة الهجينة من الرياح والشمس للجزر النائيةملخصتقدم هذه المقترح حلًا متكاملًا للطاقة مبتكرًا يجمع بشكل عميق بين طاقة الرياح وتوليد الكهرباء من الطاقة الشمسية وخزن الطاقة بالضخ ومعالجة تحلية مياه البحر. يهدف إلى معالجة التحديات الأساسية التي تواجه الجزر النائية، بما في ذلك صعوبة تغطية الشبكة وتكلفة توليد الكهرباء من الديزل العالية وقيود تخزين البطاريات التقليدية وندرة الموارد المائية العذبة. يحقق الحل التناغم والاستقلالية في "توفير الطاقة - تخزين الطاقة - توفير المياه"، مما يوفر مسارًا تقنيًا موثوقًا به واقتصاديًا وصديقًا للبيئة لتنمية ال10/17/2025 -
 نظام هجين ذكي للرياح والطاقة الشمسية مع تحكم Fuzzy-PID لتحسين إدارة البطاريات وتعقب النقطة القصوى للطاقةملخصتقدم هذه الاقتراح نظام توليد طاقة هجين يعمل بالرياح والطاقة الشمسية يستند إلى تقنية التحكم المتقدمة، بهدف معالجة احتياجات الطاقة في المناطق النائية والسيناريوهات الخاصة بكفاءة واقتصادية. يكمن جوهر النظام في نظام تحكم ذكي يدور حول معالج ATmega16. يقوم هذا النظام بتتبع نقطة القوة القصوى (MPPT) لكل من الطاقة الريحية والطاقة الشمسية ويستخدم خوارزمية محسنة تجمع بين التحكم بـ PID والتحكم الضبابي لإدارة الشحن والإفراغ الدقيق والفعال للمكون الرئيسي - البطارية. وبالتالي، يعزز بشكل كبير كفاءة إنتاج ا10/17/2025
نظام هجين ذكي للرياح والطاقة الشمسية مع تحكم Fuzzy-PID لتحسين إدارة البطاريات وتعقب النقطة القصوى للطاقةملخصتقدم هذه الاقتراح نظام توليد طاقة هجين يعمل بالرياح والطاقة الشمسية يستند إلى تقنية التحكم المتقدمة، بهدف معالجة احتياجات الطاقة في المناطق النائية والسيناريوهات الخاصة بكفاءة واقتصادية. يكمن جوهر النظام في نظام تحكم ذكي يدور حول معالج ATmega16. يقوم هذا النظام بتتبع نقطة القوة القصوى (MPPT) لكل من الطاقة الريحية والطاقة الشمسية ويستخدم خوارزمية محسنة تجمع بين التحكم بـ PID والتحكم الضبابي لإدارة الشحن والإفراغ الدقيق والفعال للمكون الرئيسي - البطارية. وبالتالي، يعزز بشكل كبير كفاءة إنتاج ا10/17/2025 -
 حل هجين فعال من حيث التكلفة للرياح والطاقة الشمسية: محول بوك-بوست وشحن ذكي يقللان تكلفة النظامملخصتقدم هذه الحل نظام توليد طاقة هجين فريد من نوعه عالي الكفاءة يعتمد على الرياح والطاقة الشمسية. لمعالجة نقاط الضعف الأساسية في التقنيات الحالية مثل الاستخدام المنخفض للطاقة، وقصر عمر البطارية، والاستقرار السيء للنظام، يستخدم النظام محوّلات DC/DC ذات التحكم الرقمي الكامل، والتكنولوجيا المتوازية المتشابكة، وخوارزمية الشحن الذكي ثلاثية المراحل. هذا يمكّن تتبع نقطة القوة القصوى (MPPT) على نطاق أوسع من سرعات الرياح والإشعاع الشمسي، مما يحسن بشكل كبير كفاءة التقاط الطاقة، ويُطيل عمر خدمة البطارية،10/17/2025
حل هجين فعال من حيث التكلفة للرياح والطاقة الشمسية: محول بوك-بوست وشحن ذكي يقللان تكلفة النظامملخصتقدم هذه الحل نظام توليد طاقة هجين فريد من نوعه عالي الكفاءة يعتمد على الرياح والطاقة الشمسية. لمعالجة نقاط الضعف الأساسية في التقنيات الحالية مثل الاستخدام المنخفض للطاقة، وقصر عمر البطارية، والاستقرار السيء للنظام، يستخدم النظام محوّلات DC/DC ذات التحكم الرقمي الكامل، والتكنولوجيا المتوازية المتشابكة، وخوارزمية الشحن الذكي ثلاثية المراحل. هذا يمكّن تتبع نقطة القوة القصوى (MPPT) على نطاق أوسع من سرعات الرياح والإشعاع الشمسي، مما يحسن بشكل كبير كفاءة التقاط الطاقة، ويُطيل عمر خدمة البطارية،10/17/2025






