| Marke | Wone Store |
| Numru tal-Model | Robot ta’ żewġ torsjonijiet |
| Rated Load | 25kg |
| gradd tal-libertà | 6-direction |
| l-Aqbar tuffaħ tal-aħważ | 1850mm |
| Siri | BR |
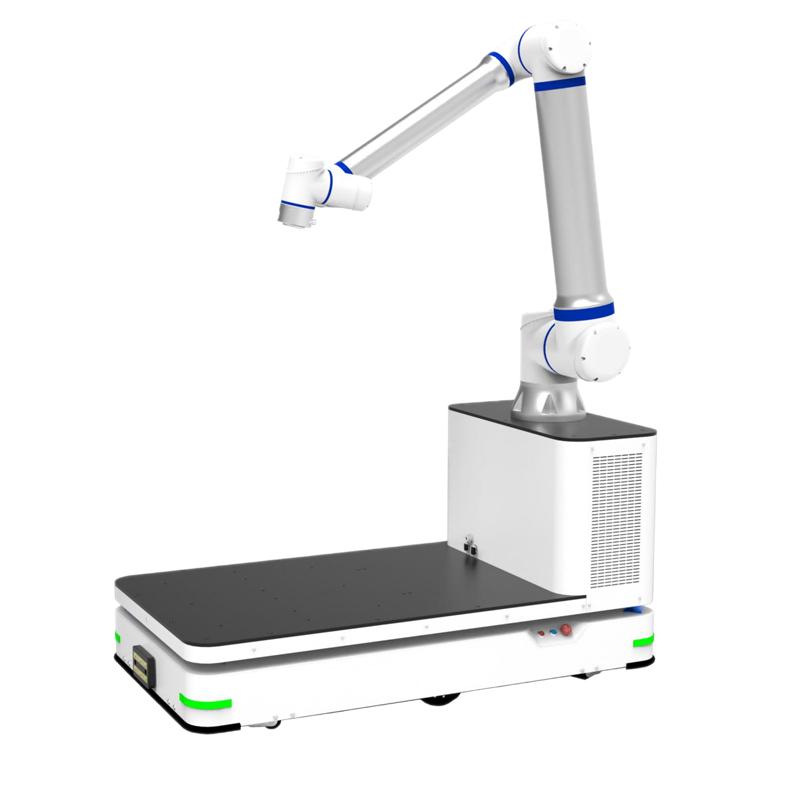
Silġ BR serji tal-robot b'dawl żewġa, l-aħwa ġdid tar-rotazzjoni żewġija u struttura f'dawn il-pajjiż, huwa model għal roboti industriji ġod-dinjar biex ibni kompetenza qerqa skont in-nuwwar. Skont l-karatteristiċi tal-merkat tal-industrija 3C ta' din il-belt, l-roboti tal-stamping huma aqra użu għal stamping veloċi ta' aġġetti żgħar. Biex isoddisfa r-reqwiżiti ta' dan l-użu, ġie iżviluppata specjalment robot veloċi multi-joint vertikali, u l-konċett tal-rotazzjoni żewġija ġie proponut fl-aħwa doppja, li jista’ jirrealizza mhux biss kull funzjoni (rotazzjoni esterna) ta’ robot standard sitt assi, imma wkoll jirrotula minn fuq is-silġ (rotazzjoni interna).
Caratteristiċi eżenċjali:
Struttura indipendenti tal-rotazzjoni żewġija
Il-kitbiet tal-wrist cinquari adoperaw trasmission bevel gear biex jirrealizzaw il-bias estern tal-kitbiet finali sitt assi relattivament mal-kitbiet żgħar, u kabel assi sitt jagħmel passa mill-għarf tal-wrist u jsuppurtat mill-bracket tal-kabel fit-telmin finali sitt assi, bil-mod hekk jirrealizzaw il-moviment ampiju tal-cinquari fuq il-linja.
Dizajn tal-Moviment ampiju fuq il-linja
Il-kitbiet tal-wrist cinquari adoperaw trasmission bevel gear biex jirrealizzaw il-bias estern tal-kitbiet finali sitt assi relattivament mal-kitbiet żgħar, u kabel assi sitt jagħmel passa mill-għarf tal-wrist u jsuppurtat mill-bracket tal-kabel fit-telmin finali sitt assi, bil-mod hekk jirrealizzaw il-moviment ampiju tal-cinquari fuq il-linja.
Dizajn tal-footprint żgħir
Il-struttura tal-rotazzjoni interna ġiet speċjalment disegnata għal driller center tal-CNC u masini tal-stamping veloċi, li tista’ tfassilhom il-konezzjoni jew il-handling bejn stazzjonijiet fi spazju riċens minn 800 tal-spazju bejn driller centers, tifassilhom l-ivitazzjoni u b'veloċita’ maxima. Il-handling ta’ stazzjonijiet ta’ applikazzjoni tal-stamping ikkuppa biss l-area tal-base.
perċezzjoni multipla
Il-robot tal-rotazzjoni żewġija BR għandu sensor multidimensionali b'perċezzjoni multimodal ta' sigurtà tal-roboti industriji, imma anka' żid funzjonaliżtas interakazzjoni linguistika intellegenti, insegnament tal-tragging, monitoraġġ tal-sigurtà u oħrajn, biex jirrealizzaw interakazzjoni kolettiva bejn l-insana u l-robot, u l-ambjent, waqt li l-roboti industriji huma karatterizzati bl-veloċita’, preċiżjoni, load elevat, u affidabilità forte.
Parametri Tekniki
| Industrial robots | BR610-1300 | BR612-1100 | BR616-1600 | BR625-1900 | |
| Degrees of freedom | 6 | 6 | 6 | 6 | |
| Maximum load | 10kg | 12Kg | 16Kg | 25kg | |
| Maximum working radius | 1310mm | 1100mm | 1600mm | 1849.5 | |
| Repeat positioning accuracy | ±0.05 mm | ±0.05mm | ±0.05mm | ±0.05mm | |
| Range of motion | J1 | ±155° | ±155° | ±154° | ±155° |
| J2 | -178° / -2° | -178°/-2° | -178°/-2° | 178°/- 2° | |
| J3 | +120°/+420° | +120°/+420° | +103°/+437° | +128°/ +412° | |
| J4 | ±190° | ±360° | ±360° | ±360° | |
| J5 | ±165° | ±161° | ±161° | ±131° | |
| J6 | ±360° | ±360° | ±360° | ±360° | |
| Maximum speed | J1 | 360°/s, 6.28 rad/s | 360°/s,6.28rad/s | 236°/s,4.12rad/s | 233°/ 4.06 rad/s |
| J2 | 250°/s, 4.36 rad/s | 250°/s,4.36 rad/s | 217°/s,3.78 rad/s | 235°/ 4.10 rad/s | |
| J3 | 360°/s, 6.28 rad/s | 360°/s,6.28rad/s | 357°/s,6.23rad/s | 285°/ 4.97 rad/s | |
| J4 | 480°/s, 8.38 rad/s | 480°/s,8.38 rad/s | 443°/s,7.72 rad/s | 487°/ 8.49 rad/s | |
| J5 | 360°/s, 6.28 rad/s | 360°/s,6.28 rad/s | 360°/s,6.28 rad/s | 487°/ 8.49 rad/s | |
| J6 | 450°/s, 7.85 rad/s | 450°/s,7.85 rad/s | 450°/s,7.85 rad/s | 487°/ 8.49 rad/s | |
| Allowing for the moment of inertia | J6 | 0.39 kgm3 | 0.52kgm3 | 0.26kgm3 | 1.43 kgm3 |
| J5 | 0.42 kgm3 | 1.5kgm3 | 1.2kgm3 | 2.65 kgm3 | |
| J4 | 0.42 kgm3 | 1.1kgm3 | 1.04kgm3 | 2.42 kgm3 | |
| Allowable Torque | J6 | 14Nm | 20.3Nm | 14.4Nm | 38.7Nm |
| J5 | 20.4Nm | 42Nm | 43Nm | 77.5Nm | |
| J4 | 20.4Nm | 36Nm | 40Nm | 57.5Nm | |
| Applicable Environment | Temperature | 0°C to 45°C | 0°C to 45°C | 0°C to 45°C | 0°C to 45°C |
| Humidity | 20% to 80% | 20%~80% | 20%~80% | 20% to 80% | |
| Other | Avoid contact with flammable, explosive, or corrosive gases and liquids, and keep away from sources of electronic noise (such as plasma). | Avoid contact with flammable, explosive, or corrosive gases and liquids, and keep away from sources of electronic noise (such as plasma). | Avoid contact with flammable, explosive, or corrosive gases and liquids, and keep away from sources of electronic noise (such as plasma). | Avoid contact with flammable, explosive, or corrosive gases and liquids, and keep away from sources of electronic noise (such as plasma). | |
| Teaching device cable length | 8m | 8m | 8m | 8m | |
| Body-to-cabinet connection cable length | 3m | 6m | 6m | 6m | |
| I/O parameters | Digital inputs: 32-bit (NPN), 32-bit outputs (NPN) | Digital inputs: 32-bit (NPN), 32-bit outputs (NPN) | Digital inputs: 32-bit (NPN), 32-bit outputs (NPN) | 32 - bit input (PNP), 30 - bit output (NPN) | |
| Body-prepared signal cable | 12-pin (connected via aviation connector) | 12-pin (connected via aviation connector) | 12-pin (connected via aviation connector) | 24 - bit (connected via aviation connector) | |
| Reserved air circuit | 1xφ6 | 1xφ8 | 1xφ8 | 2xφ8 | |
| Power capacity | 2.55kVA | 2.8kVA | 2.8kVA | 6.5kVA | |
| Rated power/voltage/current | 2.04 kW / Single-phase AC 220V / 11.6 A | 2.23kW/single-phaseAC220V /12.1A | 2.69kW/single-phaseAC220V /15.3A | 5.2kW / 3 phase / 380V / 10A | |
| Enclosure/Electrical Cabinet Protection Rating | IP54 (arm IP67) / IP53 | IP54 (arm IP67) / IP53 | IP54 (arm IP67) / IP54 | IP54 (front -end IP67)/ IP53 | |
| Installation method | Ground, inverted, and side-mounted installations | Ground, inverted, and side-mounted installations | Ground, inverted, and side-mounted installations | Ground, inverted, and side-mounted installations | |
| Body/Electrical Cabinet Weight | 61kg/15kg | 65kg/15kg | 12.4kg/47kg | 210kg/66kg | |