| Bränd | Wone Store |
| Mudeli number | Topelt-keeruline robot |
| Nõutav kaal | 25kg |
| Vabadus | 6-direction |
| Maksimaalne töötee | 1850mm |
| Seeriad | BR |
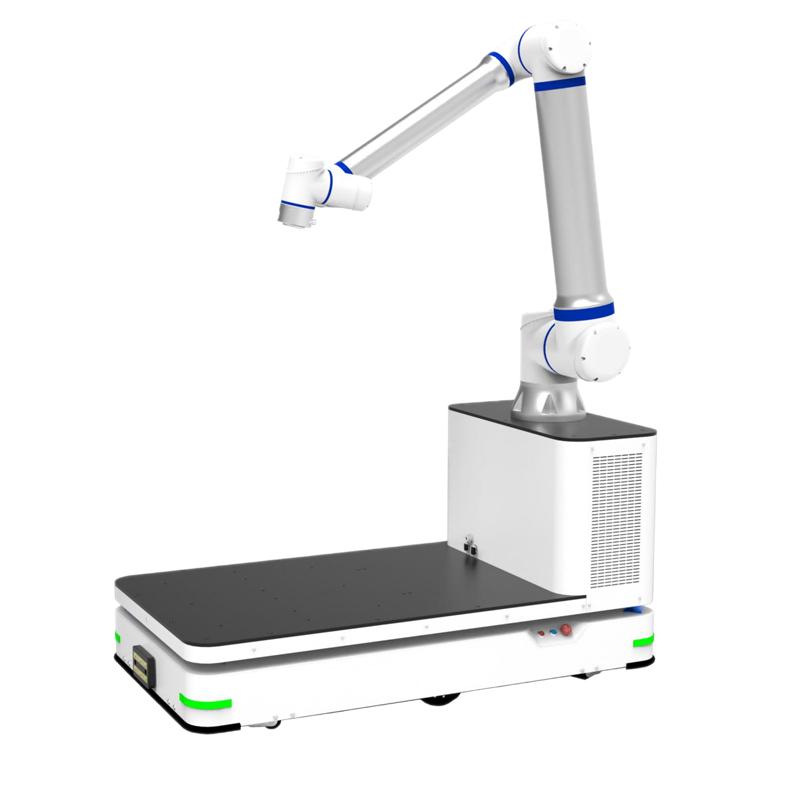
BR sarja kahekordne spinnirobot, esimene sisevalikuline kahekordne režiim ja struktuur, on näide kodumaiste tööstusrobotite põhiline konkurentsivõime innovatsiooni kaudu. Vastavalt koduse 3C tööstuse turglikule iseloomule, kus rohkem kasutatakse väikeste osade kiiret pressimist, on eranditult arendatud vertikaalne mitmeüksusega kiirroobot, ja esmakordselt on välja pakutud kahepoolse spinni mõiste, mis suudab mitte ainult realiseerida kõiki (välisspinn) standardse üldise kuueakselise roboti funktsioone, vaid ka spinnida iseenda sees (sisespinn).
Olulised omadused:
Sõltumatu kahepoolne spinnstruktuur
Viieakseline kätesekomplekt kasutab nurkriivluse edastamist, et realiseerida kuueaksliste lõppüksuse komplekti välisviilsmust väikesekätesekomplekti suhtes, ja kuueaksline juhe läbib kätesekomplektist ja toetub juhebrädile kuueaksliste lõppüksusesse, nii realiseeritakse viieakselise laiaulatuslik liikumine üle joone.
Suure ulatusega liikumise ülejoonise disain
Viieakseline kätesekomplekt kasutab nurkriivluse edastamist, et realiseerida kuueaksliste lõppüksuse komplekti välisviilsmust väikesekätesekomplekti suhtes, ja kuueaksline juhe läbib kätesekomplektist ja toetub juhebrädile kuueaksliste lõppüksusesse, nii realiseeritakse viieakselise laiaulatuslik liikumine üle joone.
Väike ala disain
Sisespinnstruktuur on eranditult disainitud CNC kiirpuurimiskeskuste ja kiire pressimismasinade jaoks, mis võimaldavad lihtsalt realiseerida ühendust või käsitlust statioonide vahel kitsas ruumis, kus puurimiskeskuste vaheline vahemaa on 800, hoidudes kõige kiiremini ja vältides pressimisrakenduse statioonide käsitlust, mis katab ainult põhjapindala.
Mitmekülgne tunnetus
BR kahepoolne spinnirobot on varustatud mitmemõõtmelise sensoriga, mis võimaldab mitmekülgset tunnetust tööstusrobotide ohutuse kohta, lisaks on lisatud ka tehiskeele interaktsioon, vedamisel õpetamine, ohutuse jälgimine jms, et saavutada inimese ja roboti, keskkonna vahel ühine interaktsioon, samal ajal tööstusrobotid, mis on kiiremad, täpsemad, kandevad suuremaid koormusi ja on tugevamini usaldusväärsed.
Tehnoloogilised parameetrid
| Tööstusrobotid | BR610-1300 | BR612-1100 | BR616-1600 | BR625-1900 | |
| Vabadusastmed | 6 | 6 | 6 | 6 | |
| Maksimaalne laadi võimekus | 10kg | 12Kg | 16Kg | 25kg | |
| Maksimaalne tööringi raadius | 1310mm | 1100mm | 1600mm | 1849.5 | |
| Korduv paigutamise täpsus | ±0.05 mm | ±0.05mm | ±0.05mm | ±0.05mm | |
| Liikumisraadius | J1 | ±155° | ±155° | ±154° | ±155° |
| J2 | -178° / -2° | -178°/-2° | -178°/-2° | 178°/- 2° | |
| J3 | +120°/+420° | +120°/+420° | +103°/+437° | +128°/ +412° | |
| J4 | ±190° | ±360° | ±360° | ±360° | |
| J5 | ±165° | ±161° | ±161° | ±131° | |
| J6 | ±360° | ±360° | ±360° | ±360° | |
| Maksimaalne kiirus | J1 | 360°/s, 6.28 rad/s | 360°/s,6.28rad/s | 236°/s,4.12rad/s | 233°/ 4.06 rad/s |
| J2 | 250°/s, 4.36 rad/s | 250°/s,4.36 rad/s | 217°/s,3.78 rad/s | 235°/ 4.10 rad/s | |
| J3 | 360°/s, 6.28 rad/s | 360°/s,6.28rad/s | 357°/s,6.23rad/s | 285°/ 4.97 rad/s | |
| J4 | 480°/s, 8.38 rad/s | 480°/s,8.38 rad/s | 443°/s,7.72 rad/s | 487°/ 8.49 rad/s | |
| J5 | 360°/s, 6.28 rad/s | 360°/s,6.28 rad/s | 360°/s,6.28 rad/s | 487°/ 8.49 rad/s | |
| J6 | 450°/s, 7.85 rad/s | 450°/s,7.85 rad/s | 450°/s,7.85 rad/s | 487°/ 8.49 rad/s | |
| Pöördliikumise hetk | J6 | 0.39 kgm3 | 0.52kgm3 | 0.26kgm3 | 1.43 kgm3 |
| J5 | 0.42 kgm3 | 1.5kgm3 | 1.2kgm3 | 2.65 kgm3 | |
| J4 | 0.42 kgm3 | 1.1kgm3 | 1.04kgm3 | 2.42 kgm3 | |
| Luba torque | J6 | 14Nm | 20.3Nm | 14.4Nm | 38.7Nm |
| J5 | 20.4Nm |
Tundke oma tarnija
Veebipood
Ajakohane tarne tase
Vastusaja
100.0%
≤4h
Ettevõtte ülevaade
Töökohvik: 1000m²
Töötajate arv:
Suurim aastane eksport (USA dollari): 300000000
Teenused
Äripädevus: Müük
Peamised kategooriad: Tehisvoolantudija/Seadme lisavarustus/juhtmeid ja kaabeleid/Uus energia/Seadmed kontrollimiseks/Kõrgepinge seadmed/Ehituseliktrik Täissaaduslik eliktrik/Väikesevooliline elektriseadmeid/Mõõturid ja mõõteseadmed/Tootevahendid/Elektrijaamad/Elektritööriistad
Kogu eluea hooldus haldur
Whole-life care management teenused seadmete hankimiseks, kasutamiseks, hoolduseks ja müügi järelhoolduseks, tagades elektriseadmete ohutu töö, pideva kontrolli ja murevaba elektritarbimise
Varustustarnija on läbinud platvormi kvalifikatsioonikinnituse ja tehnilise hinnangu, tagades nõuetele vastavuse, professionaalsuse ja usaldusväärsuse algallikast
Seotud tootedSeotud teadmised
Väljastatud tarnijad leiavad sind
Saada pakkumine kohe
Saada hinnapäring
Allalaadimine
IEE Businessi rakenduse hankimine
IEE-Business rakendusega leidke varustus saada lahendusi ühenduge ekspertidega ja osalege tööstuslikus koostöös kogu aeg kõikjal täielikult toetades teie elektritööde ja äri arengut







| |||