Vakuumpõhiste lülitite paigaldamine ja säästmine
Kõik osad ja komponendid tuleb enne paigaldamist kontrollida ja heaks kiita.
Paigaldamisel kasutatavad riiete ja tööriistad peavad olema puhtad ja vastama kokkupanemise nõuetele. Kiinnitusteksid tuleb karmistada kasutades ruutnäoluikut, sõrmnäoluikut või kruvavõtit. Lõikuvaid (avatud) võtteid ei tohi kasutada põleviku tuvastamiskammriga lähedal olevate kruvade karmistamisel.
Paigaldamise järjekord peab järgima määratud kokkupanemisprotsessi. Kiinnituste tüübid ja spetsifikatsioonid peavad täpselt vastama disaininõuetele. Eriti ei tohi olla vale pikkuneid kruve, mis kinnitavad põleviku tuvastamiskammriga seotud staatilise kontaktlõunale.
Kokkupanemise järel peavad poolte vaheline kaugus ja ülemise ning alumise väljundkontaktide asukohakaugused vastama joonistuse spetsifikatsioonile.
Kõik pöördlevad ja liiguvad osad peavad kokkupanemise järel vaba liikumise võimaldama. Harjutage kitselevate pindadele kitsepääl.
Pärast eduka säästmise ja testimise peab kõik osad täpselt puhastama ja teritama. Märgista sätestatud ühenduspunktid punase värviga, et näidata positsiooni, ja katkesta väljundkontaktid naftaseadega, seejärel katta need puhtaga paperiga kaitseks.
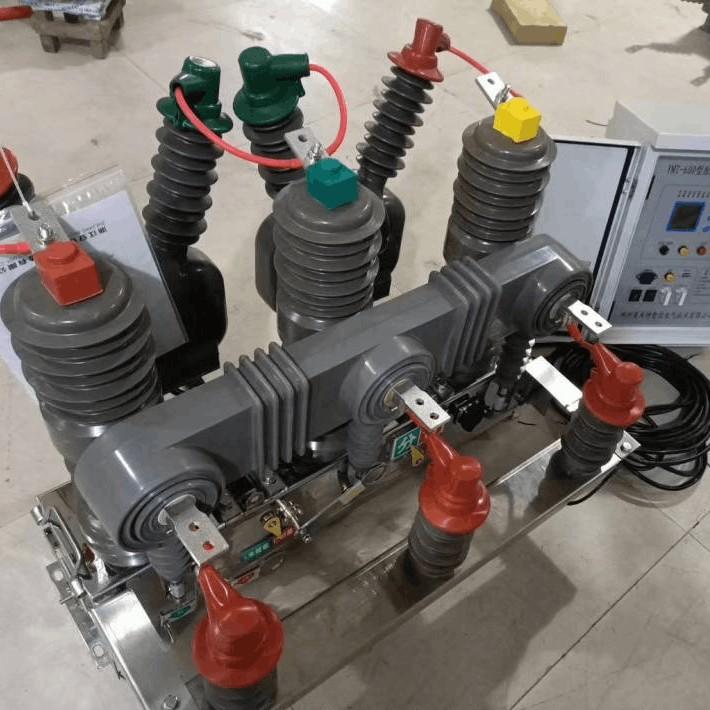
Võttes ZN39-tüübilise vakuumpõhise lülitite näitel, jagatakse kokkupanemine tavaliselt kolmeks osaks: eesosa, ülemine osa ja tagaoos.
Eesosa kokkupanemise järjekord:
Ramme paigutamine → Toetuselektrikute paigaldamine → Horisontaalsed elektrikud → Toetusreeben → Alamaine juhe → Põleviku tuvastamiskamber ja paralleelsete isolatsioonipüsti → Ülemine juhe → Juhiv sulandusklamp → Kontaktvihmaruum ja kuubik → Kolmnurkne kardakirve.
Ülemise osa kokkupanemise järjekord:
Peamane telg ja liigur – Õlitamehaas – Isolatsioonipüsti.
Tagaoosa kokkupanemise järjekord:
Toimimismehaanika – Avamiselga – Kontoor, avamise/sulgemise näitaja, maanduse märgis.
Kolme osa integreerimine:
Ühenda ees- ja ülemine osa: ühenda isolatsioonipüsti kohandatava ühenduspinna kolmnurkse kardakirvega piniga.
Ühenda taga- ja ülemine osa: ühenda toimimismehaanika kohandatava ajuri peamise telje kardakirvega piniga.
Kokkupanemisprotsess on lihtne, intuitiivne ja mugelik.

Eelneval säästmisel hõlmatakse peamiselt iga pooli kontaktvahema (avamisaug) ja kontaktliikumise (ületasumine) koarse säästmist täieliku kokkupanemise järel.
Sulgege lülitit käesolevalt aeglalt, et kontrollida, et kõik osad on korrektselt paigaldatud ja ühendatud. Vältige suuremat kontaktliikumist, sest see võib täiesti krompida sulgemissilta (silta sidumine), mis võib kahjustada komponente. Selle vältimiseks seadke isolatsioonipüsti kohandatava ühenduspinnale alguses lühem (sissepööratud). Pärast selle kinnitamist, et manuaalne töö läheb soovitud viisil, jätkake avamisauga ja kontaktliikumise mõõtmist ja säästmist.
Vakuumpõhised lülitid saab laialdaselt klassifitseerida kahet tüüpi alusel, mis on seotud liiguvate kontaktvarblite telje ja sulgemissilta telje suhtelise asukoha järgi:
Tüüp I: Kohalduv struktuur – Liiguv kontaktvarbide telg langeb kokku sulgemissilta teljega.
Tüüp II: Paralleelsed (mittekoalduvad) struktuur – Liiguv kontaktvarbide telg on eraldi sulgemissilta teljest, silta on paigutatud isolatsioonipüsti teljel, peaaegu risti kontaktvarbidega.
Arvutamismeetodid ja säästmismeetodid on nende kahe tüübi vahel veidi erinevad.
Erinevate vakuumpõhiste lülitite mehaaniliste omaduste tabelid määravad avamisauga ja kontaktliikumise nimiajendid. Manuaalse avamise ja sulgemise teostamise ja tegelike väärtuste mõõtmise järel säästke järgmiselt, et rahuldada tehnilisi spetsifikatsioone.
(1) Kohalduvate struktuuride säästmine
Samm 1: Kokku säästmine
Kokku = Avamisaug + Kontaktliikumine.
Kui kokku on väiksem kui nimiajendite summa, on peamise telje pöördumine ebapiisav. Suurendage toimimismehaanika ja peamise telje kardakirve vahel oleva kohandatava ühenduspini pikkust. Kui see on liiga pikk, siis lühendage seda. See tagab, et kokku vastab nõuetele.
Samm 2: Avamisauga ja kontaktliikumise jaotuse säästmine
Säästke iga pooli isolatsioonipüsti eesosas oleva ulituv ühenduse.
Minimaalne säästmine: pooli ruudu (pöörates ühendust 180°).
See ulituv ühendus säästab ka kolme faasi sünkroniseerimist. Säästmise käigus tuleb tasakaalustada liikumise väärtused ja faaside sünkroniseerimine. Korda manuaalsed avamise/sulgemise tsükli, kuni mõlemad on lubatud piirides. Ära ületa maksimaalset lubatud kontaktliikumist, et vältida silta sidumist ja komponentide kahjustamist.
Suurenda ühendust (välja): Avamisaug ↑, Kontaktliikumine ↓
Lühenda ühendust (sissepööratuna): Avamisaug ↓, Kontaktliikumine ↑
(2) Paralleelse (mittekoalduv) struktuuri säästmine
Sellises disainis ei lange sulgemissilta telg ja liiguvate kontaktvarbide telg kokku, nii et kokku ei oma otsest füüsikalist tähendust. Säästmismeetodid on erinevad:
Avamisauga säästmine:
See saavutatakse "avamisauga säästmise vahekaardi" abil, mis on paigutatud rammele. Vahekaardi kõrgus muudetakse lisamise või eemaldamise kaudu. Peamise telje kardakirve all on see kirju. Vahekaardi kõrguse muutmine muudab peamise telje algset nurka avatud asendis, mis muudab kontaktide avamisauga isolatsioonipüsti kaudu.
Kontaktliikumise säästmine:
Kontaktispriigi eelkrompimine (B1) on määratud rulli diameetri poolt ja seda ei saa muuta. Sulgemise järel finaalne krompimine (B2) säästetakse:
Säästmise käigus optimiseerige samal ajal kolme faasi sünkroniseerimist, kordades mitmesuguseid väikesi säästmisi, kuni kõik parameetrid on lubatud piirides.
Pikkenda varba: B2 väheneb → Kontaktliikumine suureneb
Lühenda varba: B2 suureneb → Kontaktliikumine väheneb
Sissepööratuna (lühendatuna): B2 suureneb → Kontaktliikumine väheneb
Välja (pikkendatuna): B2 vähenekseb → Kontaktliikumine suureneb
A. Isolatsioonipüsti eesosas oleva ulituv ühenduse säästmine:
B. Toimimismehaanika ja peamise telje kardakirve vahel oleva ühenduspini pikkuse säästmine:
(3) Abilülitite interloki säästmine
Pärast avamisauga ja kontaktliikumise manuaalset säästmist tuleb abilülitite interloki positsioon korralikult seadistada enne elektrilist tööd – muul juhul võivad kahjustuda elektrilised komponendid.
Säästmismeetod:
Lõigake ära abilülitite ja peamise telje kardakirve vaheline ühenduspind.
Sulgege lülitit manuaalselt, pöörates abilülitit punkti, kus see hakkab trippima. Säästke kohandatava varba ja kulbi pikkust, nii et pininailed oleksid umbes ühesugused.
Avage lülitit manuaalselt ja pöörake abilülitit uuesti tema trippimispunktini, tagades, et pininailed oleksid ühesugused.
Korda protsessi, kuni pininailed vastavad nii avatud kui ka sulgetud asendis, seejärel panustage pin.
Veenduge, et abilülitite kontaktid avanevad natuke enne, kui peamised kontaktid on täielikult avatud või sulgedud.
Pärast avamisauga, kontaktliikumise ja abilülitite eelnevat säästmist, tehke elektrilised avamise/sulgemise operatsioonid ja mõõtke järgmisi mehaanilisi omadusi:
Avamise/sulgemise aeg
Kiirus
Faaside vaheline sünkroniseerimine (faaside mittekattuvus)
Sulgemise hüppeldus
Testimise seadmed:
Optiline oscilloskoop – väga täpne ja visuaalne
Lülitite analüsaator – lihtne, kiire ja piisavalt täpne väljaspool kasutamiseks
(Konkreetsed testmeetodid ei ole selles kirjeldatud.)
Pärast testimist, tehke täpseid säästmisi kõigile ebasobivatel parameetritel, et saavutada optimaalne toimimine.
(1) Sünkroniseerimise täpne säästmine
Tuvasta faas, millel on suurim ajaerinevus. Kui üks pool sulgeb liiga vara (või hilja), suurenda (või vähenda) seda natuke avamisaugut, pöörates isolatsioonipüsti kohandatavat ühendust sissepöördetuna (varajama sulgemise korral) või välja (hilisema sulgemise korral) umbes poolikult. Tavaliselt saab selle abil vähendada sünkroniseerimise vea 1 ms-ni.
(2) Avamise/sulgemise kiiruse täpne säästmine
Kiirus on mõjutatud mitmete tegurite poolt, kuid olulisemad kohandatavad elemendid on avamissilta pingeline jõud ja kontaktliikumine.
Liiga suur sulgemiskiirus, liiga madal avamiskiirus:
Suurenda kontaktliikumist või krambi avamissilta.
Sulgemiskiirus sobiv, avamiskiirus liiga madal:
Suurenda koguliikumist 0,1–0,2 mm, mis suurendab kontaktliikumist ja parandab avamiskiirust.
Liiga suur avamiskiirus:
Vähenda kontaktliikumist 0,1–0,2 mm, et vähendada kiirust.
Pärast säästmist, mõõtke uuesti avamisauga ja kontaktliikumist, et tagada, et nad on veel spetsifikatsioonide piires.
(3) Sulgemishüppelduse eemaldamine
Sulgemishüppeldus võib tuleneda:
Liiga suure sulgemislõhke kõrvalpingest, mis põhjustab liiguvate kontaktide teljesuunalist taandumist.
Liiguvate kontaktvarbide halva juhiba, mis põhjustab liiga suurt kallutust.
Liiga suurt vahetust transmissioonilingid, eriti kontaktispriigi ja juhivara vahel.
Halba ristlikkust kontaktipindade ja kesklinja vahel, mis põhjustab külgeslipu kontaktide kokkupuutumisel (ilmutub "hüppeldusena" oscilloskoobi graafikul).
Vähendamise meetmed:
Disain peaks vältima liiga suurt mehaanilist kõrvalpinget (ei ole kohandatav valmistamise järel).
Tagage liiguvate kontaktvarbide korralik juhiba.
Kohalduvates disainides on kontaktispriigi otseühendus juhivara – ei ole vahetuvaid lingid, seega on vähem hüppeldust.
Paralleelses disainis, kolmnurkne kardakirve kolme piniga, mis suurendab hüppelduse riski.
Kui hüppeldus on tingitud põleviku tuvastamiskambri kontaktipinna halva ristlikkusest, proovi kambrit assambleerimisel pöörama 90°, 180° või 270°, et leida optimaalne joondus. Kui see ei ole tõhus, asenda põleviku tuvastamiskamber.
Taga, et kõik kruvid on täielikult karmistatud säästmise käigus, et vältida värinamist.
Pärast seda, kui kõik mehaanilised omadused vastavad spetsifikatsioonidele, tehke 50 operatsioonitsüklit (avamise/sulgemise ja uuesti sulgemise) maksimaalset, minimaalset ja määratud juhtimispinget, nagu tehasenõuded.
Pärast 50 operatsioonit, mõõtke uuesti kõiki mehaanilisi parameetreid. Tulemused peaksid vastama algsetele mõõtmistele, et läbida.
Lõpuks tehke:
Tsüklite vastupidavuse test
Voolusageduse vastupidavuse testid esmane ja sekundaarne tsüklis
Ainult need ühikud, mis läbivad kõik testid, on heaks kiidetud saatmiseks.