Instaladojaj postuloj
Ĉiuj partoj kaj komponantoj devas pasi inspektion antaŭ instalaĵo.
Laboriloj kaj ekipoj uzataj por instalaĵo devas esti puraj kaj kontentigi asamblajn postulojn. Dum fiksemo de fikselementoj, uzu fiksitajn ŝlosilojn, ŝlosilojn kun kolĉeĥo, aŭ ŝlosilojn kun ŝraŭboŝtupo. Ne uzu reguleblajn ŝlosilojn dum fiksemo de ŝraŭboj proksime de la arkekslingva ĉambro.
La sekvenco de instalaĵo devas konformi al la regulreguloj pri instalaĵo, kaj la specifikaĵoj de fikselementoj por ĉiu komponanta instalaĵo devas akordiĝi kun la dizajnpostuloj. Speciala atento devas esti donita al la longeco de la boltoj fiksantaj la statan kontaktfinon de la arkekslingva ĉambro.
Post asamblado, la distanco inter polusoj kaj la poziciaj distancoj de la supraj kaj subaj eliroj devas kontentigi la postulojn de la desegndimensioj.
Post asamblado, ĉiuj turnantaj kaj glitaj partoj devas moviĝi libere. Lubrikanta greaso devas esti aplikita al la areoj subfricadaj pro movado.
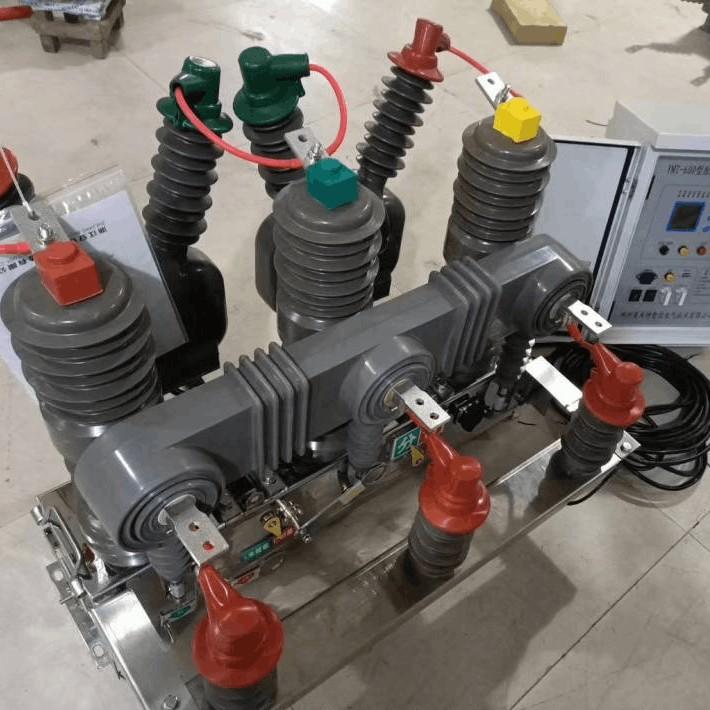
Post sukcesa provado de regulado, netigu kaj maltrankvile la ekipon. Marku la reguleblajn konektajn partojn de ĉiuj komponantoj per ruĝaj pintmarkoj. Apliku vaselinon al la elirterminoj kaj protektu ilin per pura papera emballaĵo.
Instalaĵo
Prezentante la vakuum-interruptilon ZN39 kiel ekzemplon, ĝia asamblado ĝenerale enkalkulas tri partojn: la antaŭan parton, la supran parton, kaj la postan parton.
Sequenco de Antaŭa Parta Instalaĵo:
Unue, pozicionu la kadron.
Tiam instalu la stolpoizolilojn, sekve la horizontalajn izolilojn.
Sekve, anstasu la brakon, la suban busbaron, la arkekslingvan ĉambron kaj la paralelajn izolajn bastonetojn.
Post tio, instalu la supran busbaron, la fleksan konekton de la kondukada tenilo, la kontaktospingasan sedon kaj finfine la triangulan virelan brakon.
Sequenco de Supra Parta Instalaĵo:
Unue instalu la ĉefan akson kaj la apogrilon.
Tiam montu la olebufferon.
Fine, anstasu la izolan puŝbastoneton.
Sequenco de Posta Parta Instalaĵo:
Unue instalu la operacian mekanisman.
Tiam anstasu la malferman spirbon, la nombron, la fermaĵ-kaj-malfermaĵ-indikilojn, kaj la terezmarkecon.
Konectu tiujn tri grandajn partojn jene:
Konectu la antaŭan parton kaj la supran parton: Uzu pinton por konecti la reguleblan universon juntaĵon de la izola puŝbastoneto al la triangula virela brako.
Regulado de Mekanikaj Karakterizaĵoj
Provizora Regulado
La provizora regulado ĉefe fokusas sur la proksimuma regulado de la kontaktmalferma distanco kaj la kontaktvojo por ĉiu poluso de la asamlita vakuum-interruptilo. Dum la provizora regulado, fermu la interruptilon manue malrapide kaj kontrolo ĉu ĉiuj partoj estas instalitaj kaj konektitaj korrekte. Krome, ne metu la kontaktvojon tro granda, por eviti tro komprimi la kontaktferman spirbon. Tial, dum la instalaĵo, estas bonkonseile mallongigi (enŝraŭbi) la reguleblan juntaĵon de la izola puŝbastoneto. Unufoje la manua operacio estas normala, la mezurado kaj regulado de la malferma distanco kaj la kontaktvojo povas esti farita, kio estos priskribita aparte malsupre.
Regulado de Malferma Distanco kaj Kontaktvojo
Por diversaj tipoj de vakuum-interruptiloj, bazitaj sur la relativa pozicio de la mova kontaktstango kaj la aksi de la kontaktferma spirbo, ili povas ĝenerale esti dividadaj en du tipoj:
Aksi-koincida tipo: La aksi de la mova kontaktkubo koincidas kun la aksi de la ferma spirbo.
Heteraksi-a tipo: La aksi de la mova kontaktstango estas disigita de la aksi de la ferma spirbo. La ferma spirbo estas instalita sur la aksi de la izola puŝbastoneto, kaj la pozicioj de la du aksioj estas preskaŭ perpendikularaj. (Vidu niajn kompaniajn ZN28A-tipajn dividitajn vakuum-interruptilojn, kiel montrite en Figuroj 1 kaj 2.)
La kalkulmetodoj por la malferma distanco kaj la kontaktvojo de ĉi tiuj du tipoj de interruptiloj iomete diferencas.
La mekanikaj karakterizaĵotabeloj de diversaj vakuum-interruptiloj provizas datumojn pri la nominala malferma distanco kaj la kontaktvojo. Post manua fermaĵo kaj malfermaĵo de la interruptilo por mezuri la malferman distancon kaj la kontaktvojon, la jenaj reguladmetodoj povas esti uzitaj por certigi ke ili kontentigas la teknikajn specifaĵojn.
Regulado de Aksi-Koincida Strukturo
Se la totala vojo (kiu egalas al la sumo de la malferma distanco kaj la kontaktvojo) estas pli malgranda ol la sumo de iliaj nominalaj valoroj, tio signifas ke la turna movado de la ĉefa akso de la switch estas insufiĉa. En tia okazo, la regulebla konektilo, kiun konektas la operacian mekanisman al la ĉefa akso virela brako, devus esti regulita pli longa; kontraŭe, se la totala vojo estas pli granda, ĝi devus esti regulita pli mallonga por igi la totalan vojon baza kontentiga. Tio estas la unua paŝo.
En la dua paŝo, regulu la distribuon inter la malferma distanco kaj la kontaktvojo en la totala vojo. Tiam nur necesas reguli la longon de la fileta konektilo ĉe la antaŭa fino de la izola puŝbastoneto por ĉiu poluso. Kiam longigas la konektilon, la malferma distanco fo pligrandiĝas dum la kompresiva vojo Jc malpligrandiĝas; kiam mallongigas ĝin, la malferma distanco fo malpligrandiĝas kaj la kontaktvojo Jc pligrandiĝas. La minimuma regula amplekso de la fileta konektilo estas duono de turo (sarklimo aŭ senklimo), kio estas duono de la filetpaso.
La fileta konektilo de la izola puŝbastoneto estas ankaŭ uzata por reguli la tri-polusa sinkronismo. Tial, dum la regula procezo, necesas certigi ke ambaŭ la malferma distanco kaj la kontaktvojo estas en la tolerpermesa amplekso, kaj samtempe prenu en konsideron la tri-polusan sinkronismon. Ordinarie, pluraj manuaj fermaĵo kaj malfermaĵo operacioj bezonas por fini la reguladon. Tuta tempon de la regula procezo, speciala atento devas esti donita por ne superi la maksimuman permesan amplekson de la kontaktvojo, por eviti superkomprimi la kontaktferman spirbon kaj kaŭzi danĝeron al la komponantoj.
Regulado de Heteraksi-A Strukturo
En ĉi tiu tipo de interruptilo, ĉar la aksi de la kontaktspingo kaj la aksi de la mova kontakto ne estas sur la sama rekto, la menciita kalkulo de la totala vojo havas nenian fizikan signifon ĉi tie, kaj la reguladmetodo estas diferenca.
Malferma distanco: Ĉi tiu tipo de interruptilo estas ekipita kun komponanto nomita "malferma distanca regula padeto". Ĝia bazo estas fiksita sur la kadro. La nombro de padetoj povas esti pliigita aŭ malpliigita por ŝanĝi ĝian altecon. La supro estas premata per virela brako svarmita de la ĉefa akso. Per ŝanĝado de la alteco de la regula padeto, la komenca angulo de la ĉefa akso en la malferma stato povas esti ŝanĝita. Post transsendo tra la izola puŝbastoneto, la kontaktmalferma distanco do ŝanĝiĝas.
Kontaktvojo: La antaŭa kompresiva alto B1 de la kontaktspingo estas determinita per la diametro de la kompresrolulo kaj ne povas esti ŝanĝita. Post fermaĵo, la fina kompresiva alto B2 de la kontaktspingo povas esti regulita per la jenaj du manieroj:
Maniero A: Turnu la filetan konektilon ĉe la fino de la izola puŝbastoneto en aŭ eksteren. Kiam enŝraŭbas (t.e. kiam la distanco inter la pintoj de la izola puŝbastoneto estas mallongigita), B2 pligrandiĝas kaj la kontaktvojo malpligrandiĝas; kiam eksterŝraŭbas, la kontraŭa okazas kaj la kontaktvojo pligrandiĝas.
Maniero B: Regulu la longon de la regulebla konektilo inter la operacia mekanismo kaj la virela brako de la ĉefa akso de la interruptilo, kio ankaŭ povas ŝanĝi B2. Kiam la konektilo estas etendita, B2 malpligrandiĝas kaj la kontaktvojo pligrandiĝas; kontraŭe, kiam ĝi estas mallongigita, la kontaktvojo malpligrandiĝas.
Dum la regula procezo de la malferma distanco kaj la kontaktvojo, ankaŭ necesas reguli la tri-polusan nonsinkronismon. Fari reciprokajn kompromisojn kaj ripete reguli por certigi ke ĉiuj estas en la permesa toleramplekso.
Regulado de Helpa Switch Interlock
Post manua regulado de la malferma distanco kaj la kontaktvojo, la interlocka pozicio de la helpa switch devas esti regulita antaŭ elektra fermaĵo kaj malfermaĵo. Alie, elektraj komponantoj povas esti bruligitaj.
Dum la regulo, diskonigu la interlockon ĉe unu fino de la konektilo inter la helpa switch kaj la ĉefa akso virela brako. Ferme la interruptilon manue, kaj samtempe turnu la helpan switch al la ĵus-tripozicio. Regulu la longon de la regula boltaro kaj la konektilo tiel ke la pintoj de la konektilo kaj la regula boltaro estas proksimume aliniitaj. Tiam, malfermu la interruptilon manue kaj denove turnu la helpan switch al la ĵus-tripozicio. Ankaŭ certigu ke la pintoj de la konektilo kaj la regula boltaro estas proksimume aliniitaj. Ripetu la reguladon multfoje ĝis la supraj postuloj estas kontentigitaj, kaj poste enmetu la pinton. La celo estas certigi ke la elektraj kontaktoj de la helpa switch povas esti fortranĉitaj iomete pli frue je la fino de la fermaĵo aŭ malfermaĵo de la interruptilo.
Mekanikaj Karakterizaĵparametroj Testado, Regulado, kaj Fabrika Akceptotestado
Karakterizaĵtestado
Post provizora regulado de la malferma distanco, la kontaktvojo, kaj la helpa switch, elektra fermaĵo kaj malfermaĵo povas esti farita, kaj mekanikaj karakterizaĵparametroj kiel ferma kaj malferma tempo, rapido, nonsinkronisemo, kaj ferma reago povas esti mezuritaj.
Estas ĉefe du tipoj de testinstrumentoj por mekanikaj karakterizaĵparametroj: la optika osciloskopio kaj la switch karakterizaĵmezurilo. La antaŭa estas pli akurata kaj intuicia; la lasta estas simpla kaj rapide manipulebla, kaj ĝia akurateco povas kontentigi la operaciapostulojn, taŭga por lokuzo. La specifaj testmetodoj ne estas priskribitaj ĉi tie.
Fina Regulado de Mekanikaj Karakterizaĵoj
Post testado, finregulu la nekonformaj parametroj por optimizi ĉiujn mekanikajn karakterizaĵparametrojn tiom bone kiel eble.
Fina regulado de nonsinkronisemo:Identigu la fazon kun la plej granda diferenco en ferma kaj malferma tempo per mezuro. Se tiu poluso fermiĝas tro frue (malfrue), leviĝu (mallongiĝu) lia malferma distanco. Ĉar la malfermaj distancoj de la tri polusoj jam estas regulitaj por esti proksimume samaj, tiam la regulo povas esti realigita per enŝraŭbado (eksterŝraŭbado) de la regulebla juntaĵo de la izola tirbastoneto de tiu poluso per duono de turo. Ĝenerale, la nonsinkronisemo de ferma kaj malferma povas esti regulita al ene de 1ms.
Fina regulado de ferma kaj malferma rapidaj:La ferma kaj malferma rapidaj estas influataj de diversaj faktoroj. Tamen, la ĉefaj reguleblaj komponantoj estas ĝenerale la malferma spirbo kaj la kontaktvojo. La streĉo de la malferma spirbo influas la malferman rapidon, dum la kontaktvojo (la kompresamo de la kontakt-prem-spirbo) havas grandan influon sur la malferman rapidon.
Ekzemple, kiam la ferma rapidas tro alta kaj la malferma rapidas tro malalta, la kontaktvojo povas esti plilongigita aŭ la malferma spirbo povas esti pli forte streĉita; kontraŭe, ĝi povas esti pli malstreĉita. Alia ekzemplo estas kiam la ferma rapidas taŭga sed la malferma rapidas malalta. En tiu okazo, la totala vojo povas esti regulita por ĝin plilongigi proksimume 0.1 - 0.2mm. Tiam, la kontaktvojo de ĉiu poluso pligrandos 0.1 - 0.2mm, kaj la malferma rapidas ankaŭ pligrandos. Kontraŭe, se la malferma rapidas tro alta, la kontaktvojo povas esti regulita por ĝin mallongigi 0.1 - 0.2mm, kaj la rapidas malgrandos konsekvenca.
Post regulado de la nonsinkronisemo kaj rapidas, la malferma distanco kaj la kontaktvojo de ĉiu poluso devas esti remezuritaj kaj korektitaj. La datumoj devas esti ene de la specifita amplekso de la produkto.
Forigo de Ferma Reago
Estas kvar eblaj kaŭzoj por la ferma reago de vakuum-interruptilo:
Unue, la ferma impakta rigideco estas tro alta, kaŭzante la movan kontakton axial rebondi.
Due, la gvidado de la mova kontaktstango estas malbona, rezultigante troan vibradon.
Trie, la interspaco en la transdonila ligilo estas tro granda, speciala la transdonila interspaco inter la komenco de la kompressa finaĵo de la kontakt-spingo kaj la konduka stango.
Kvarie, la orteco inter la kontaktflanko kaj la centra akso estas ne sufiĉa, kaŭzante flankan glitadon dum kontakto, kiu reflektiĝas kiel "reago" en la oscilogramo aŭ testilo.
Por redukti aŭ forigi la ferma reagon, en la strukturdesegno, necesas certigi ke la tuta struktura impakta rigideco ne estas tro alta (sed tio ne povas esti ŝanĝita por fina produkto), kaj la interspaco en la gvidstrukturo de la mova kontaktstango ne devas esti tro granda.
En aksi-koincida strukturo, ĉar la kontakt-prem-spingo estas direktconnectita al la konduka stango sen intermediara transdonilo, ne ekzistas interspaco. Tamen, en heteraksi-a strukturo, ekzistas triangula virela brako por direkcian ŝanĝon inter la kontakt-spingo kaj la mova kontaktstango, kiu estas connectita per tri pintoj. Tio kreis tri interspacojn, kio faras reagon pli verŝajna ol la antaŭa. Se reago (glitado) okazas pro insufiĉa orteco de la kontaktfinflanko de la arkekslingva ĉambro, la arkekslingva ĉambro povas esti rotaciita je 90°, 180°, kaj 270° por proba asamblado por trovi la pozicion kie la supraj kaj subaj kontaktflankoj konformas bone.
Ordinarie, tio povas solvi la problemon. Se ĝi ne funkcias, la arkekslingva ĉambro devas esti anstataŭigita. Dum la procezo de traktado de la ferma reago, ĉiuj ŝraŭboj devas esti fortikigita por eviti la interferon de vibro.
Fabrika Akceptotesto
Post tio ke ĉiuj menciitaj mekanikaj karakterizaĵtestoj estas kvalifikitaj, la ferma, malferma, kaj reproferma operaciotestoj je la maksimuma, minimuma, kaj nominata operacivoltajo devas esti faritaj laŭ la fabrikpostuloj, kun akumulita totalo de 50 operacioj. Post 50 operacioj, mezuru ĉiujn mekanikajn karakterizaĵparametrojn denove. Ili devas esti proksimume konformaj kun la antaŭe mezuritaj mekanikaj karakterizaĵparametroj por esti konsideritaj kvalifikitaj. Fine, faru la cirkvitrezistancan teston kaj la potencvica resistokvantan teston por la unua kaj dua cirkvito. La produkto povas esti eldonita nur kiam ĉiuj testoj estas kvalifikitaj.
Konectu la postan parton kaj la supran parton: Uzu pinton por konecti la reguleblan transdonilan konektilon de la operacia mekanismo al la ĉefa akso virela brako. La asamblproceso estas simpla, intuicia, kaj oportuna.