| Marko | Wone Store |
| Modelnumero | Duobla-Ŝpinrobo |
| Nomita ŝargo | 10kg |
| libereco | 6-direction |
| Maksimuma labora vojo | 1310mm |
| Serio | BR |
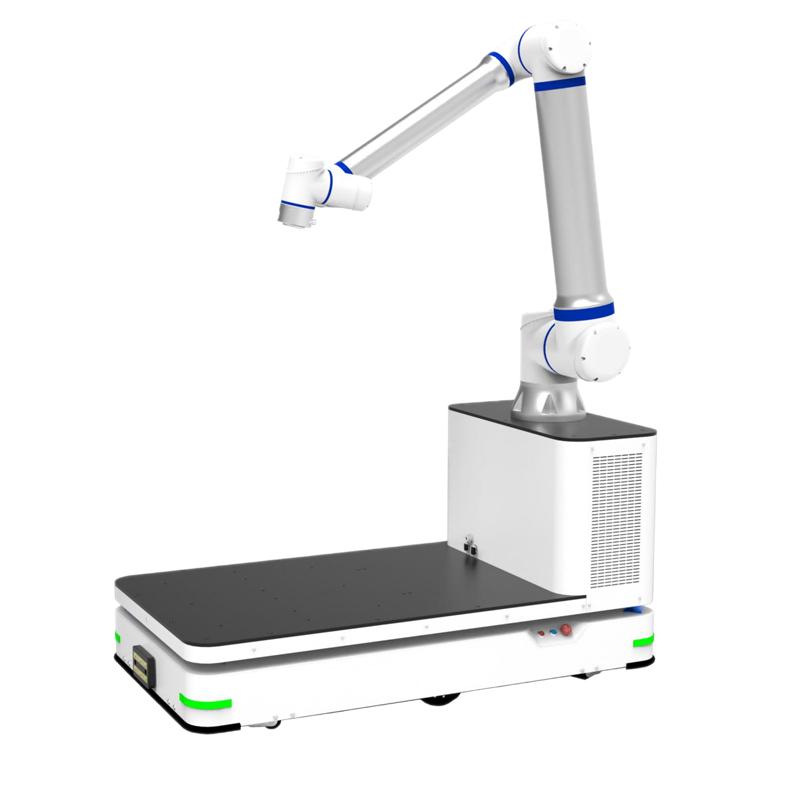
BR serio duobla rotaca roboto, la unua hejma duobla rotaca modo kaj strukturo, estas modelo por hejmaj industraj robotoj konstrui kernkonkurencan povo tra inovado. Laŭ la markaj karakterizoj de hejma 3C-industrio, plenkaptaj centroj, stampilrobotoj plejparte uzas por malgrandaj pecoj de rapida stampado. Por kontentigi la bezonojn de tiaj aplikoj, speciala vertikala multligamenta rapida robotrobo estas disvolvita, kaj la koncepto de duobla rotaco estas proponita unue, kiu ne nur povas realigi ĉiujn funkciojn (ekstera rotacio) de norma ĝenerala sesakso-roboto, sed ankaŭ povas rotaci de enen (interna rotacio).
Ĉefaj trajtoj:
Sendependa duobla rotaca strukturo
La kvinaksa vrista assemblo adoptas konuskolĉon por transdoni la eksteran deklivigon de la sesaksa fina ligamenta assemblo relative al la malgranda brakarkomponento, kaj la sesa akso kablon eliras de la vrista ligamento kaj estas subtenata per la kablosubtenilo en la sesa akso fina ligamento, tiel realigante la grandan movadon de la kvinakso super la linio.
Dizajno de Granda Movado Super Linio
La kvinaksa vrista assemblo adoptas konuskolĉon por transdoni la eksteran deklivigon de la sesaksa fina ligamenta assemblo relative al la malgranda brakarkomponento, kaj la sesa akso kablon eliras de la vrista ligamento kaj estas subtenata per la kablosubtenilo en la sesa akso fina ligamento, tiel realigante la grandan movadon de la kvinakso super la linio.
Malgranda fundamenta areo dizajno
La interna rotaca strukturo estas speciale dezegnita por CNC-rapidperfortilo centro kaj rapidpunchmachino, kiu povas facile realigi la konekton aŭ manĝon inter stacioj en angusta spaco ene de 800 de la interspaco inter perfortilo centroj, facile evitante kaj kun la plej rapida rapideco. Stampa aplika stacia manĝado kovras nur la bazan areon.
multaj perceptoj
BR duobla rotaca robotrobo havas multidimensian sensoron kun multimodalaj perceptoj de la sekureco de industraj robotroboj, sed ankaŭ aldonis inteligentan lingvan interagon, traktadon de instruado, sekurecan monitoradon kaj aliajn funkciojn, por atingi komunan interagon inter homo kaj robotrobo, inter la medio, dum industraj robotroboj kun alta rapideco, alta precizeco, alta ŝarĝo, forta fidindaj ecoj.
Teknikaj Parametroj
| Industriaj robotroboj | BR610-1300 | BR612-1100 | BR616-1600 | BR625-1900 | |
| Gradoj da libereco | 6 | 6 | 6 | 6 | |
| Maksimuma ŝarĝo | 10kg | 12Kg | 16Kg | 25kg | |
| Maksimuma labora radiuso | 1310mm | 1100mm | 1600mm | 1849.5 | |
| Repetita pozicioniga akurateco | ±0.05 mm | ±0.05mm | ±0.05mm | ±0.05mm | |
| Movada amplekso | J1 | ±155° | ±155° | ±154° | ±155° |
| J2 | -178° / -2° | -178°/-2° | -178°/-2° | 178°/- 2° | |
| J3 | +120°/+420° | +120°/+420° | +103°/+437° | +128°/ +412° | |
| J4 | ±190° | ±360° | ±360° | ±360° | |
| J5 | ±165° | ±161° | ±161° | ±131° | |
| J6 | ±360° | ±360° | ±360° | ±360° | |
| Maksimuma rapideco | J1 | 360°/s, 6.28 rad/s | 360°/s,6.28rad/s | 236°/s,4.12rad/s | 233°/ 4.06 rad/s |
| J2 | 250°/s, 4.36 rad/s | 250°/s,4.36 rad/s | 217°/s,3.78 rad/s | 235°/ 4.10 rad/s | |
| J3 | 360°/s, 6.28 rad/s | 360°/s,6.28rad/s | 357°/s,6.23rad/s | 285°/ 4.97 rad/s | |
| J4 | 480°/s, 8.38 rad/s | 480°/s,8.38 rad/s | 443°/s,7.72 rad/s | 487°/ 8.49 rad/s | |
| J5 | 360°/s, 6.28 rad/s | 360°/s,6.28 rad/s | 360°/s,6.28 rad/s | 487°/ 8.49 rad/s | |
| J6 | 450°/s, 7.85 rad/s | 450°/s,7.85 rad/s | 450°/s,7.85 rad/s | 487°/ 8.49 rad/s | |
| Permesanta momenta inercio | J6 | 0.39 kgm3 | 0.52kgm3 | 0.26kgm3 | 1.43 kgm3 |
| J5 | 0.42 kgm3 | 1.5kgm3 | 1.2kgm3 | 2.65 kgm3 | |
| J4 | 0.42 kgm3 | 1.1kgm3 | 1.04kgm3 | 2.42 kgm3 | |
| Permesanta Momento | J6 | 14Nm | 20.3Nm | 14.4Nm | 38.7Nm |
| J5 | 20.4Nm | 42Nm | 43Nm |
Konu ŝin vian provizanton
Retbutiko
Tempona liverateco
Respondata tempo
100.0%
≤4h
Kompania priskribo
Laborloko: 1000m²
Totala personaro:
Plej Alta Jara Eksperto (USD): 300000000
Servoj
Negocia Speco: Vendo
Ĉefkategorioj: Transformilo/Aparataro/dradoj kaj kaboloj/nova energio/Kontrola aparato/Alta tensa elektraj aparatoj/Konstrua elektriĉado Kompleta elektriĉa instalado/Malta voltaj aparatoj/Instrumentaro/Produktadoĵoj/Elektrocentrajxoj/Elektraĵoj
Tuta vivo garantia administranto
Tuta-vivaj zorgaj administradaj servo por provizado, uzado, prizorgo kaj post-vendaj pri elektraj ekipaĵoj, certigante sekuran funkciadon, daŭran regulon kaj senzorgan uzon de elektra energio
La provizanto de ekipaĵoj pasis platforman atestan certigon kaj teknikan takson, garantante konformecon, profesian econ kaj fidindecon ekde la fonto.
Rilatajaj ProdojRilataj Scioj
Ne trovint la ĝustan provizanton? Lasu kontrolitajn provizantojn trovi vin.
Akiri Citaton Nun
Sendi petolasondon
Elŝuto
Ricevu la IEE Business-aplikon
Uzu IEE-Business por uzi aparataron trovi solvojn kunlabori kun ekspertoj kaj partopreni en industria kunlaboro ie kaj ĉie subtenante viajn elektraĵprojektojn kaj bizneson







| |