| Marca | Wone Store |
| Número de model | Robot de doble giratori |
| Càrrega nòminal | 10kg |
| graus de llibertat | 6-direction |
| Recorregut de treball màxim | 1310mm |
| Sèrie | BR |
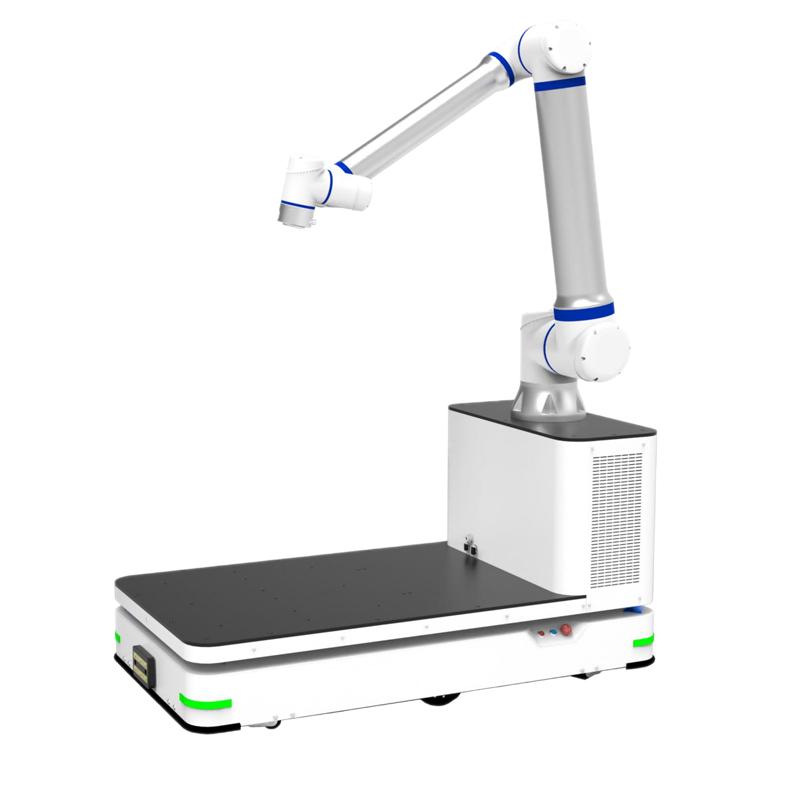
La sèrie de robots doble gir BR, el primer mode i estructura de doble gir a nivell nacional, és un model per a la construcció de la competivitat bàsica dels robots industrials a través de l'innovació. Segons les característiques del mercat de la indústria 3C a nivell nacional, els robots d'estampació es fan servir principalment per a petites peces d'estampació de alta velocitat. Per satisfer les necessitats d'aquestes aplicacions, s'ha desenvolupat un robot vertical de múltiples articulacions de alta velocitat, i s'ha proposat per primera vegada el concepte de doble rotació, que no només pot realitzar totes les funcions (rotació externa) d'un robot estàndard de sis eixos, sinó també girar des de dins (rotació interna).
Característiques clau:
Estructura de doble gir independent
L'ensamblat de pols de cinc eixos utilitza una transmissió de rodes dentades còncaves per realitzar el desplaçament extern de l'ensamblat de junta final de sis eixos respecte a l'ensamblat de braç petit, i el cable de sis eixos surt de la junta del pols i és suportat pel suport del cable cap a la junta final de sis eixos, així realitzant el gran moviment de cinc eixos sobre la línia.
Disseny de gran abast de moviment sobre la línia
L'ensamblat de pols de cinc eixos utilitza una transmissió de rodes dentades còncaves per realitzar el desplaçament extern de l'ensamblat de junta final de sis eixos respecte a l'ensamblat de braç petit, i el cable de sis eixos surt de la junta del pols i és suportat pel suport del cable cap a la junta final de sis eixos, així realitzant el gran moviment de cinc eixos sobre la línia.
Disseny de petita superfície
L'estructura de rotació interna està dissenyada especialment per al centre de fresadora CNC de alta velocitat i la màquina de punxat ràpid, que pot realitzar fàcilment la connexió o manipulació entre estacions en un espai estret dins de 800 de l'espai entre centres de fresadora, evitant fàcilment i amb la major velocitat. La manipulació de la estació d'aplicació de punxat cobreix només l'àrea de base.
percepció múltiple
El robot doble gir BR té un sensor multidimensional amb percepció multimodal de la seguretat dels robots industrials, però també s'han afegit funcions com la interacció lingüística intel·ligent, l'ensenyament per tracció, la monitorització de seguretat, etc., per aconseguir una interacció comunal entre humans i robots, l'entorn, mentre que els robots industrials presenten característiques d'alta velocitat, alta precisió, alta càrrega i forta fiabilitat.
Paràmetres tècnics
| Robots industrials | BR610-1300 | BR612-1100 | BR616-1600 | BR625-1900 | |
| Graus de llibertat | 6 | 6 | 6 | 6 | |
| Càrrega màxima | 10kg | 12Kg | 16Kg | 25kg | |
| Radi de treball màxim | 1310mm | 1100mm | 1600mm | 1849.5 | |
| Precisió de reposicionament repetitiva | ±0.05 mm | ±0.05mm | ±0.05mm | ±0.05mm | |
| Abast de moviment | J1 | ±155° | ±155° | ±154° | ±155° |
| J2 | -178° / -2° | -178°/-2° | -178°/-2° | 178°/- 2° | |
| J3 | +120°/+420° | +120°/+420° | +103°/+437° | +128°/ +412° | |
| J4 | ±190° | ±360° | ±360° | ±360° | |
| J5 | ±165° | ±161° | ±161° | ±131° | |
| J6 | ±360° | ±360° | ±360° | ±360° | |
| Velocitat màxima | J1 | 360°/s, 6.28 rad/s | 360°/s,6.28rad/s | 236°/s,4.12rad/s | 233°/ 4.06 rad/s |
| J2 | 250°/s, 4.36 rad/s | 250°/s,4.36 rad/s | 217°/s,3.78 rad/s | 235°/ 4.10 rad/s | |
| J3 | 360°/s, 6.28 rad/s | 360°/s,6.28rad/s | 357°/s,6.23rad/s | 285°/ 4.97 rad/s | |
| J4 | 480°/s, 8.38 rad/s | 480°/s,8.38 rad/s | 443°/s,7.72 rad/s | 487°/ 8.49 rad/s | |
| J5 | 360°/s, 6.28 rad/s | 360°/s,6.28 rad/s | 360°/s,6.28 rad/s | 487°/ 8.49 rad/s | |
| J6 | 450°/s, 7.85 rad/s | 450°/s,7.85 rad/s | 450°/s,7.85 rad/s | 487°/ 8.49 rad/s | |
| Permetent moment d'inèrcia | J6 | 0.39 kgm3 | 0.52kgm3 | 0.26kgm3 | 1.43 kgm3 |
| J5 | 0.42 kgm3 | 1.5kgm3 | 1.2kgm3 | 2.65 kgm3 | |
| J4 | 0.42 kgm3 | 1.1kgm3 | 1.04kgm3 | 2.42 kgm3 | |
| Torque permès | J6 | 14Nm | 20.3Nm | 14.4Nm | 38.7Nm |
| J5 | 20.4Nm | 42Nm | < Conèixer el seu proveïdor|||