
Á medida que a demanda de control preciso nos procesos industriais continúa aumentando, a tecnoloxía tradicional de Modulación por Anchura de Pulso (PWM) ten dificultades para satisfacer os requisitos de alto rendemento dinámico e baixa distorsión harmónica. En contraste, a tecnoloxía PWM de alta frecuencia mellora a calidade da onda de saída e reduce as harmónicas do sistema aumentando a frecuencia do portador, optimizando así o rendemento dos inversores. Como consecuencia, equilibrar a eficiencia e a fiabilidade do sistema ao aplicar a tecnoloxía PWM de alta frecuencia converteuse nun aspecto crítico no desenvolvemento da tecnoloxía de inversores.
1. Teoría Básica e Características Técnicas do PWM de Alta Frecuencia
A tecnoloxía PWM é a técnica central utilizada nos sistemas de control eléctrico de inversores para regular o voltaxe e a frecuencia. Xera secuencias de pulsos comparando sinais de referencia con sinais de portador e usa estas secuencias de pulsos para controlar os estados de conmutación dos dispositivos de potencia, logrando así un control preciso do suministro de enerxía á carga. No control de inversores, o ciclo de traballo D do PWM pode expresarse en relación coa amplitud da onda de referencia Vref e a amplitud da onda de portador Vtri como segue:

A razón de modulación m defínese como a razón entre a amplitud da onda de referencia e a amplitud da onda de portador. Influencia directamente o valor efectivo e as características harmónicas do voltaxe de saída. A expresión desta razón é:

A frecuencia do portador fc refírese á frecuencia da onda triangular usada para xerar o sinal PWM. O seu valor afecta directamente a velocidade de resposta dinámica do sistema e a distribución das harmónicas de saída. A razón de frecuencia N defínese como a razón entre a frecuencia do portador e a frecuencia da onda de referencia, expresada como:

onde é a frecuencia da onda de referencia. A tecnoloxía PWM de alta frecuencia xeralmente refírese a técnicas de control PWM con una frecuencia de portador superior a 10 kHz. Nos inversores modernos, con mejoras continuas no rendemento dos dispositivos de potencia, as frecuencias de portador alcanzaron 20 kHz ou incluso superiores. Ao aumentar a frecuencia do portador, os componentes harmónicos de saída desprazanse a rangos de frecuencia máis altos, facilitando a filtrado posterior e reducindo eficazmente o ruido e a vibración do motor.
Os experimentos demostran que aumentar a frecuencia do portador de 5 kHz a 20 kHz pode reducir o ruido do motor entre 12-15 dB e diminuir o aumento de temperatura entre 5-8 °C. Á medida que a frecuencia do portador aumenta, a onda de saída PWM aproxímase máis a unha onda senoidal ideal, e a Distorsión Harmónica Total (THD) reducíse significativamente. A unha frecuencia de portador de 20 kHz, a THD do voltaxe de saída do inversor desce a aproximadamente 5%, que é considerablemente mellor que o 8%-12% típico das técnicas PWM de baixa frecuencia. Ademais, o PWM de alta frecuencia ofrece vantaxes como unha resposta dinámica máis rápida e maior precisión de control.
2. Principais Desafíos na Implementación do PWM de Alta Frecuencia e As Súas Soluciós
2.1 Pérdidas de Conmutación Altas e Métodos de Mitigación
O problema máis destacado coa tecnoloxía PWM de alta frecuencia é o aumento agudo das perdas de conmutación. Dado que as perdas de conmutación dos dispositivos de potencia son proporcionais á frecuencia de conmutación, a operación de alta frecuencia leva a unha menor eficiencia do sistema e a maiores demandas de xestión térmica. A perda de conmutación Psw dun módulo de Transistor Bipolar de Puerta Aislada (IGBT) pode modelarse como segue:

onde e son as perdas de enerxía de encendido e apagado, respectivamente; Err é a enerxía de recuperación inversa; Vdc é o voltaxe real do bus DC; é o voltaxe de referencia; é a corrente real; e Iref é a corrente de referencia.
Para suprimir as perdas de conmutación, poden adoptarse as seguintes medidas:
Primeiro, usar dispositivos de potencia avanzados como Transistores de Efecto de Campo de Óxido Metálico de Carburo de Silicio (SiC MOSFETs), que ofrecen características de conmutación superiores aos IGBTs convencionais;
Segundo, optimizar o deseño do circuito do driver de porta empregando técnicas de condución de duple pendente para axustar dinamicamente a resistencia da porta durante as transicións de conmutación, equilibrando así a velocidade de conmutación e a interferencia electromagnética (EMI);
Finalmente, implementar técnicas de conmutación suave, como topoloxías de conmutación a voltaxe cero (ZVS) ou conmutación a corrente cero (ZCS), para reducir significativamente as perdas de conmutación.
2.2 Efecto de Tempo Morto e Técnicas de Compensación
Baixo a operación de PWM de alta frecuencia, aínda que o tempo morto absoluto permanece constante, a súa proporción respecto ao período de conmutación aumenta, facendo que o efecto de tempo morto sexa máis pronunciado. Isto pode levar a distorsión do voltaxe de saída, rendemento de baixa velocidade degradado e incremento do ripple de par. Para mitigar eficazmente estes problemas, empreganse algoritmos de compensación de tempo morto, expresados como:

3 Esquema de Implementación Baseado en FPGA para a Tecnoloxía PWM de Alta Frecuencia
3.1 Diseño de Arquitectura do Sistema
O control PWM de alta frecuencia impón maiores demandas no rendemento en tempo real e na precisión de control das plataformas de computación. Os Procesadores de Señal Digital (DSP) tradicionais adoitan atopar limitacións como potencia de cálculo insuficiente e latencia de interrupción significativa ao implementar PWM de alta frecuencia. En contraste, as Matrices de Portas Programables en Campo (FPGA) están mellor adaptadas a tales aplicacións debido ás súas capacidades de procesamento en paralelo e flexibilidade de implementación a nivel de hardware.
A arquitectura global do sistema de control PWM de alta frecuencia baseado en FPGA consiste en catro módulos centrais: a unidade de control principal, a unidade de xeración de PWM, a unidade de procesamento de señales de retroalimentación e a unidade de protección. Especificamente:
Unidade de Control Principal: Executa algoritmos de control en bucle pechado como velocidad, corrente e posición;
Unidade de Xeración de PWM: Encargada de xerar ondas PWM de alta precisión e xestionar o control de tempo morto;
Unidade de Procesamento de Señales de Retroalimentación: Encarga da adquisición e preprocesamento de señales como corrente, voltaxe e posición;
Unidade de Protección: Detecta e responde a fallos como sobrecorrente, sobrevoltaxe e sobretensión para asegurar a seguridade do sistema.
O sistema adopta un deseño modular, con módulos funcionais interconectados mediante interfaces estándar. Internamente, a FPGA emprega unha arquitectura de dúas dominios de reloxio: os algoritmos de control operan en un dominio de reloxio de baixa frecuencia para reducir o consumo de recursos, mentres que o módulo de xeración de PWM corre en un dominio de reloxio de alta frecuencia para asegurar un timing preciso e alta resolución.
3.2 Optimización e Implementación do Algoritmo de Control PWM
Para lograr un control PWM de alta frecuencia de alto rendemento, o algoritmo convencional de Modulación por Vector Espacial de Anchura de Pulso (SVPWM) optimízase introducindo un algoritmo de control PWM mellorado, expresado como:

onde Ta é o tempo de conducción da perna superior da Fase A; vα e vβ son os compoñentes do voltaxe de referencia no sistema de coordenadas α-β. Este algoritmo impleméntase na FPGA usando unha arquitectura en tubería, transformando cálculos trigonométricos complexos en operacións lineares simples. Isto reduce significativamente a latencia de cálculo e permite a execución en un ciclo. Para optimizar o control de tempo morto, adóptase unha estratexia de compensación de tempo morto adaptativo.
3.3 Probas de Rendemento do Sistema e Análise
Para avaliar a superioridade do esquema proposto de implementación de PWM de alta frecuencia (denominado a partir de agora "esquema proposto"), compárase con unha implementación convencional baseada en DSP (denominado a partir de agora "esquema convencional"). A plataforma de proba constrúese en un FPGA Xilinx Artix-7 e un DSP TMS320F28379D, utilizando topoloxías de circuito de nivel de potencia idénticas e módulos de potencia (1200 V/50 A SiC MOSFET). As métricas de rendemento inclúen a Distorsión Harmónica Total (THD) do voltaxe de saída, o tempo de resposta dinámica, o factor de potencia e a eficiencia do sistema. Cada proba repítese tres veces, con resultados promediados para asegurar a fiabilidade.
Como se mostra na Táboa 1, o esquema proposto demostra ventaxas significativas sobre o esquema convencional en case todas as métricas: a THD do voltaxe de saída redúcese do 8,63% ao 5,33%, unha mellora do 38,2%; o tempo de resposta dinámica disminúe de 428 μs a 245 μs, unha redución do 42,5%; e o factor de potencia aumenta do 0,91 ao 0,98. Aínda que a eficiencia do sistema só mellora un 0,1%, esta ganancia marginal é aínda significativa dado o xa alto rendemento basal superior ao 92%.

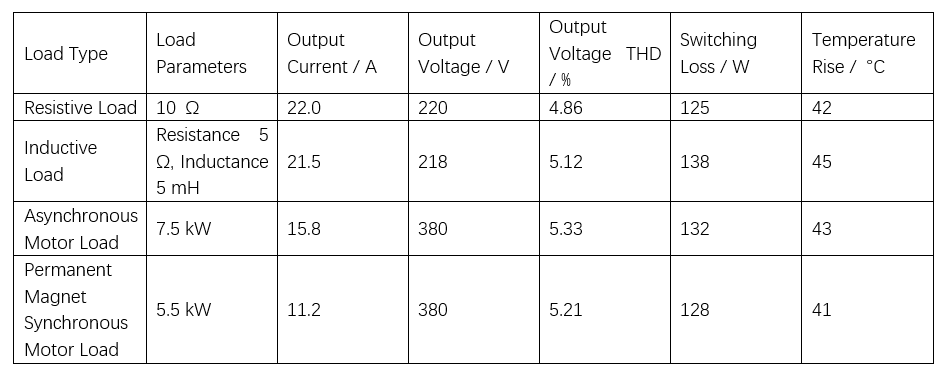
A viabilidade do esquema proposto baixo condicións de carga variables fágose probas adicionais, con resultados presentados na Táboa 2. As probas cubren cargas resistivas, inductivas e de motor. Os resultados mostran que o esquema proposto mantén un rendemento estable en todos os tipos de carga: a variación na THD do voltaxe de saída é só de 0,47%, demostrando unha excelente robustez do algoritmo de control; as perdas de conmutación mantéñense entre 125 W e 138 W, con unha fluctuación só do 10,4%, indicando unha xestión de potencia eficaz; e o aumento de temperatura mantéñese dentro de 41-45 °C, confirmando unha estabilidade térmica superior.
4 Conclusión
A tecnoloxía PWM de alta frecuencia é un elemento clave para mellorar o rendemento dos inversores, pero a súa implementación nos sistemas de control eléctricos enfronta múltiples desafíos técnicos. Este artigo aborda problemas críticos como as perdas de conmutación de alta frecuencia, os efectos de tempo morto e o deseño do circuito do driver, propondo soluciós sistemáticas e presentando un marco de implementación baseado en FPGA.
O esquema proposto ofrece alta precisión, baixa latencia e forte rendemento en tempo real, mellorando eficazmente tanto a resposta dinámica como a precisión en estado estacionario. A investigación proporciona un soporte técnico sólido para o control de inversores de alto rendemento e ten un gran potencial de aplicación en campos como a automatización industrial, a xeración de enerxía renovable e os vehículos eléctricos.










