
Efter som efterspørgslen på præcis kontrol i industrielle processer fortsat stiger kæmper den traditionelle Pulse-Width Modulation (PWM) teknologi med at opfylde kravene til høj dynamisk ydeevne og lav harmonisk forvrængning. I modsætning hertil forbedrer højfrekvens PWM teknologi udgangsbølgeformens kvalitet og reducerer systemets harmoniske ved at øge bærerfrekvensen, hvilket optimerer inverteres ydeevne. Derfor er det blevet en afgørende aspekt af inverter teknologiens udvikling at balancere systemets effektivitet og pålidelighed, når der anvendes højfrekvens PWM teknologi.
1. Grundlæggende teori og tekniske karakteristika for højfrekvens PWM
PWM teknologi er den kernekompetence, der bruges i inverters elektriske kontrollsystemer til at regulere spænding og frekvens. Den genererer pulssekvenser ved at sammenligne referenssignaler med bærersignaler og bruger disse pulssekvenser til at styre strømforsyningens skiftetilstande, således at der opnås præcis kontrol over strømforsyningen til belastningen. I inverterkontrol kan PWM's tidsrum D udtrykkes i forhold til referensbølgenes amplitudede Vref og bærerbølgens amplitudede Vtri som følger:

Moduleringsforholdet m defineres som forholdet mellem referensbølgenes amplitudede til bærerbølgens amplitudede. Det har direkte indflydelse på den effektive værdi og de harmoniske egenskaber af udgangsspændingen. Udtrykket for dette forhold er:

Bærerfrekvensen fc refererer til den trekantsformede bølges frekvens, der bruges til at generere PWM-signalet. Dens værdi har direkte indflydelse på systemets dynamiske respons hastighed og fordelingen af udgangsharmonikker. Frekvensforholdet N defineres som forholdet mellem bærerfrekvensen til referensbølgens frekvens, udtrykt som:

hvor er referensbølgens frekvens. Højfrekvens PWM teknologi henviser generelt til PWM-kontrolteknikker med en bærerfrekvens, der overstiger 10 kHz. I moderne inverters, med konstante forbedringer i strømforsyningsenheder, har bærerfrekvenser nået 20 kHz eller endda højere. Ved at øge bærerfrekvensen flyttes udgangsharmonikkomponenterne til højere frekvensområder, hvilket gør det lettere at filtrere dem efterfølgende og effektivt reducere motorens støj og vibration.
Eksperimenter viser, at en øgning af bærerfrekvensen fra 5 kHz til 20 kHz kan reducere motorstøj med 12–15 dB og nedbringe temperaturstigning med 5–8 °C. Når bærerfrekvensen øges, nærmer PWM-udgangsbølgen sig mere og mere en ideal sinusbølge, og Total Harmonic Distortion (THD) bliver betydeligt reduceret. Ved en bærerfrekvens på 20 kHz falder THD for inverterens udgangsspænding til ca. 5%, hvilket er betydeligt bedre end de 8%–12%, der typisk ses ved lavfrekvens PWM-teknikker. Desuden tilbyder højfrekvens PWM fordele som hurtigere dynamisk respons og højere kontrolpræcision.
2. Kritiske udfordringer ved implementering af højfrekvens PWM og deres løsninger
2.1 Høje switchingtab og metoder til reduktion
Den mest fremherskende udfordring ved højfrekvens PWM teknologi er den markante stigning i switchingtab. Da switchingtabene for strømforsyningsenheder er proportionale med switchingfrekvensen, fører højfrekvens drift til en reduktion i systemets effektivitet og øgede krav til termisk ledelse. Switchingtabet Psw for en enkelt Isoleret-Gate Bipolar Transistor (IGBT) modul kan modelleres som følger:

hvor og er energitabene ved slukning og tænding, hhv.; Err er omvendte genoprettelsesenergi; Vdc er den faktiske DC-bus-spænding; er referensspændingen; er den faktiske strøm; og Iref er referensstrømmen.
For at undertrykke switchingtab kan følgende foranstaltninger træffes:
Først, brug avancerede strømforsyningsenheder som Siliciumkarbid Metal-Oxide-Semiconductor Field-Effect Transistors (SiC MOSFETs), som tilbyder bedre switchingegenskaber sammenlignet med konventionelle IGBT'er;
Andet, optimer gate driver kredsløbsdesign ved at anvende dobbeltskæve drivemetoder til at dynamisk justere gate resistansen under switchingovergange, således at der opnås balance mellem switchinghastighed og elektromagnetisk støj (EMI);
Til sidst, implementer soft-switching teknikker, som zero-voltage switching (ZVS) eller zero-current switching (ZCS) topologier, for at betydeligt reducere switchingtab.
2.2 Dead-time effekt og kompensationsmetoder
Under højfrekvens PWM drift, selvom den absolutte dead-time forbliver konstant, øges dens andel i forhold til switchingperioden, hvilket gør dead-time effekten mere udtalt. Dette kan føre til udgangsspændingsforvrængning, forringet lavhastighedsyde og øget drejningsmomentsvingning. For at effektivt mildne disse problemer anvendes dead-time kompensationsalgoritmer, udtrykt som:

3 Implementeringsskema for højfrekvens PWM teknologi baseret på FPGA
3.1 Systemarkitektur design
Højfrekvens PWM kontrol stiller højere krav til beregningsplatformers realtidsevne og kontrolpræcision. Traditionelle Digital Signal Processorer (DSP'er) møder ofte begrænsninger som utilstrækkelig beregningskraft og betydelig afbrydelseslatency, når de implementerer højfrekvens PWM. I modsætning hertil er Field-Programmable Gate Arrays (FPGA'er) bedre egnet til sådanne applikationer på grund af deres parallelle behandlingskapacitet og hardwareniveau implementeringsflexibilitet.
Den samlede arkitektur for FPGA-baseret højfrekvens PWM kontrolsystem består af fire kerneenheder: hovedkontrolenheden, PWM-genereringsenheden, feedback signalbehandlingsenheden og beskyttelsesenheten. Specifikt:
Hovedkontrolenhed: Udfører lukkede kontrolealgoritmer som hastighed, strøm og positionsloop;
PWM-genereringsenhed: Har ansvar for at generere højpræcise PWM-bølger og administrere dead-time kontrol;
Feedback signalbehandlingsenhed: Behandler indsamlingen og forbehandlingen af signaler som strøm, spænding og position;
Beskyttelsesenhed: Opdager og reagerer på fejl som overstrøm, overspænding og overtemperatur for at sikre systemets sikkerhed.
Systemet anvender et modulart design, hvor funktionelle moduler forbinder via standardiserede grænseflader. Intern i FPGA anvendes en toklokdomænestrukture: kontrolealgoritmer fungerer i et lavfrekvent klokdomæne for at reducere ressourceforbrug, mens PWM-genereringsmodulen kører i et højfrekvent klokdomæne for at sikre præcis timing og høj opløsning.
3.2 Optimering og implementering af PWM kontrolealgoritme
For at opnå høj ydeevne højfrekvens PWM kontrol, optimeres den konventionelle Space Vector Pulse Width Modulation (SVPWM) algoritme ved at introducere en forbedret PWM kontrolealgoritme, udtrykt som:

hvor Ta er ledningsperioden for fase A's øverste ben; vα og vβ er komponenterne af referensspændingen i α-&β; koordinatsystem. Denne algoritme implementeres i FPGA ved hjælp af en pipelinearkitektur, der transformerer komplekse trigonometriske beregninger til simple lineære operationer. Dette reducerer betydeligt beregningslatency og gør det muligt at udføre single-cycle eksekvering. For at optimere dead-time kontrol anvendes en adaptiv dead-time kompensationsstrategi.
3.3 Systemydeevne test og analyse
For at evaluere den foreslåede højfrekvens PWM implementeringsrammes (herfra kendt som "den foreslåede ramme") overlegenhed, sammenlignes den med en konventionel DSP-baseret implementering (herfra kendt som "den konventionelle ramme"). Testplatformen bygges på en Xilinx Artix-7 FPGA og en TMS320F28379D DSP, ved hjælp af identiske effektniveaucirkuittopologier og effektmoduler (1200 V/50 A SiC MOSFET). Ydeevnemål inkluderer udgangsspændingens Total Harmonic Distortion (THD), dynamisk respons tid, effektfaktor og systemeffektivitet. Hver test gentages tre gange, og resultaterne gennemsnittes for at sikre pålidelighed.
Som vist i tabel 1, demonstrerer den foreslåede ramme betydelige fordele i forhold til den konventionelle ramme på de fleste mål: udgangsspændingens THD er reduceret fra 8,63% til 5,33%, en 38,2% forbedring; dynamisk respons tid er reduceret fra 428 µs til 245 µs, en 42,5% reduktion; og effektfaktor er steget fra 0,91 til 0,98. Selvom systemeffektiviteten kun er forbedret med 0,1%, er denne marginal forbedring stadig meningsfuld, da den allerede høje referenceeffektivitet overstiger 92%.

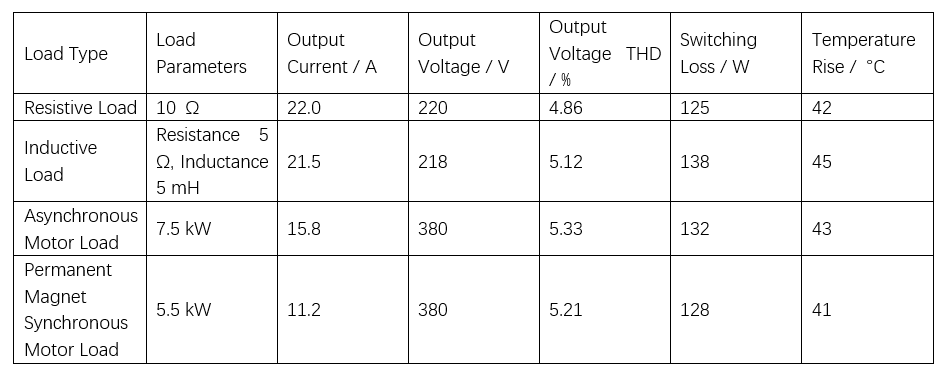
Den foreslåede rammes levedygtighed under varierende lastbetingelser testes yderligere, med resultater præsenteret i tabel 2. Testene dækker resistive, induktive og motorelast. Resultaterne viser, at den foreslåede ramme bibeholder stabil ydeevne over alle lasttyper: variationen i udgangsspændingens THD er kun 0,47%, hvilket demonstrerer en fremragende robusthed af kontrolealgoritmen; switchingtabene holdes mellem 125 W og 138 W, med en svævel på kun 10,4%, hvilket indikerer effektiv strømforvaltning; og temperaturstigning er holdt inden for 41–45 °C, hvilket bekræfter fremragende termisk stabilitet.
4 Konklusion
Højfrekvens PWM teknologi er en nøglefaktor for at forbedre inverterens ydeevne, dog står dens implementering i elektriske kontrollsystmer over for flere tekniske udfordringer. Denne artikel behandler kritiske spørgsmål som højfrekvens switchingtab, dead-time effekter og drivkredsløbsdesign ved at foreslå systematiske løsninger og præsentere en FPGA-baseret implementeringsramme.
Den foreslåede ramme tilbyder høj præcision, lav latency og stærk realtidsevne, og forbedrer effektivt både dynamisk respons og stabiltilstands præcision. Forskningen giver solid teknisk støtte til høj ydeevne inverter kontrol og har bred anvendelsespotentiel i felter som industriel automatisering, fornyelig energi produktion og elbiler.










