
Terwijl de vraag naar nauwkeurige controle in industriële processen blijft toenemen, heeft traditionele Pulse-Breedtemodulatie (PWM) technologie moeite om aan de eisen voor hoge dynamische prestaties en lage harmonische vervorming te voldoen. Daarentegen verbetert hoge-frequentie PWM-technologie de kwaliteit van het uitvoeringsgolfpatroon en vermindert systeemharmonieën door de dragersfrequentie te verhogen, waardoor de prestaties van omvormers worden geoptimaliseerd. Het evenwicht vinden tussen systeemefficiëntie en betrouwbaarheid bij het toepassen van hoge-frequentie PWM-technologie is daarom een cruciaal aspect geworden in de ontwikkeling van omvormertechnologie.
1. Basisprincipes en Technische Kenmerken van Hoge-Frequentie PWM
PWM-technologie is de kernmethode die wordt gebruikt in elektrische besturingssystemen van omvormers om spanning en frequentie te regelen. Het genereert pulserende sequenties door referentiesignalen te vergelijken met dragersignalen en gebruikt deze pulserende sequenties om de schakeltoestanden van krachtapparaten te beheren, waardoor een nauwkeurige controle over de energietoevoer aan de belasting wordt bereikt. In de besturing van omvormers kan de duty cycle D van PWM worden uitgedrukt in relatie tot de amplitude van de referentiegolf Vref en de amplitude van de dragersignaal Vtri als volgt:

De modulatieratio m wordt gedefinieerd als de ratio van de amplitude van de referentiegolf tot de amplitude van de dragersignaal. Het beïnvloedt direct de effectieve waarde en de harmonische kenmerken van de uitvoerspanning. De uitdrukking voor deze ratio is:

De dragersignaal frequentie fc verwijst naar de frequentie van de driehoeksgolf die wordt gebruikt om het PWM-signaal te genereren. Zijn waarde beïnvloedt direct de dynamische responsnelheid van het systeem en de verdeling van de uitvoerharmonieën. De frequentieratio N wordt gedefinieerd als de ratio van de dragersignaal frequentie tot de frequentie van de referentiegolf, uitgedrukt als:

waar de frequentie van de referentiegolf is. Hoge-frequentie PWM-technologie verwijst in het algemeen naar PWM-besturingstechnieken met een dragersignaal frequentie die 10 kHz overschrijdt. In moderne omvormers, met continue verbeteringen in de prestaties van krachtapparaten, hebben dragersignalen frequenties bereikt van 20 kHz of hoger. Door de dragersignaal frequentie te verhogen, worden de uitvoerharmonische componenten verschoven naar hogere frequentiebereiken, wat het vervolgens filteren faciliteert en effectief motorlawaai en trillingen vermindert.
Experimenten tonen aan dat het verhogen van de dragersignaal frequentie van 5 kHz naar 20 kHz het motorgeluid kan verminderen met 12–15 dB en de temperatuurstijging met 5–8 °C. Naarmate de dragersignaal frequentie toeneemt, benadert de PWM-uitvoergolf meer een ideale sinusgolf, en neemt de totale harmonische vervorming (THD) aanzienlijk af. Bij een dragersignaal frequentie van 20 kHz daalt de THD van de uitvoerspanning van de omvormer tot ongeveer 5%, wat aanzienlijk beter is dan de 8%–12% die typisch zijn voor lage-frequentie PWM-technieken. Bovendien biedt hoge-frequentie PWM voordelen zoals snellere dynamische respons en hogere bestuurprecisie.
2. Belangrijkste Uitdagingen bij de Implementatie van Hoge-Frequentie PWM en Hun Oplossingen
2.1 Hoge Schakelverliezen en Verminderingstechnieken
Het meest opvallende probleem met hoge-frequentie PWM-technologie is de scherpe stijging van schakelverliezen. Aangezien de schakelverliezen van krachtapparaten evenredig zijn met de schakelfrequentie, leidt hoge-frequentie bedrijf tot een verminderde systeemefficiëntie en gestelde eisen aan thermisch beheer. Het schakelverlies Psw van een enkele Isolatiepoort Bipolaire Transistor (IGBT) module kan worden gemodelleerd als volgt:

waar en respectievelijk de inschakel- en uitschakelenergieverliezen zijn; Err is de omkeerenergie; Vdc is de werkelijke gelijkstroombusspanning; is de referentiespanning; is de werkelijke stroom; en Iref is de referentiestroom.
Om schakelverliezen te onderdrukken, kunnen de volgende maatregelen worden genomen:
Ten eerste, gebruik geavanceerde krachtapparaten zoals Siliciumcarbide Metal-Oxide-Semiconductor Veld-effecttransistors (SiC MOSFETs), die superieure schakelkarakteristieken bieden ten opzichte van conventionele IGBT's;
Ten tweede, optimaliseer het poortdriver circuitontwerp door dubbele-helling besturingstechnieken toe te passen om de poortweerstand dynamisch te aanpassen tijdens schakelovergangen, waardoor een balans wordt gevonden tussen schakelsnelheid en elektromagnetische interferentie (EMI);
Tot slot, implementeer soft-switching technieken, zoals nulspanningschakeling (ZVS) of nulstroomschakeling (ZCS) topologieën, om de schakelverliezen aanzienlijk te verlagen.
2.2 Doodtijd Effect en Compensatiemethoden
Bij hoge-frequentie PWM-bedrijf, hoewel de absolute doodtijd constant blijft, neemt zijn proportie ten opzichte van de schakelperiode toe, waardoor het doodtijdeffect sterker wordt. Dit kan leiden tot vervorming van de uitvoerspanning, verslechterde laagsnelheidsprestaties en toename van koppelripple. Om deze problemen effectief te verminderen, worden doodtijdcompensatie algoritmen toegepast, uitgedrukt als:

3 FPGA-Gebaseerde Implementatieschema voor Hoge-Frequentie PWM-Technologie
3.1 Systeemarchitectuur Ontwerp
Hoge-frequentie PWM-besturing stelt hogere eisen aan de real-time prestaties en besturingsnauwkeurigheid van rekenplatforms. Traditionele Digitale Signaal Processoren (DSP's) komen vaak tegen beperkingen zoals ontoereikende rekenkracht en aanzienlijke interruptlatentie bij de implementatie van hoge-frequentie PWM. Daarentegen zijn Field-Programmeerbare Gate Arrays (FPGA's) beter geschikt voor dergelijke toepassingen vanwege hun parallelle verwerkingscapaciteiten en hardware-niveau implementatie flexibiliteit.
De algemene architectuur van het FPGA-gebaseerde hoge-frequentie PWM-besturingssysteem bestaat uit vier kernmodules: de hoofdbesturingseenheid, de PWM-generatieeenheid, de feedbacksignaal verwerkingseenheid en de beschermingseenheid. Specifiek:
Hoofdbesturingseenheid: Voert gesloten-lus besturalgoritmen uit zoals snelheid, stroom en positielussen;
PWM-generatieeenheid: Verantwoordelijk voor het genereren van hoogprecisie PWM-golven en het beheren van doodtijdcontrole;
Feedbacksignaal verwerkingseenheid: Handelt de acquisitie en voorbewerking van signalen zoals stroom, spanning en positie;
Beschermingseenheid: Detecteert en reageert op fouten zoals overstroom, overspanning en oververhitting om de systeembrede veiligheid te waarborgen.
Het systeem maakt gebruik van een modulaire ontwerp, waarbij functionele modules via gestandaardiseerde interfaces met elkaar verbonden zijn. Intern gebruikt de FPGA een dubbele-klokgebiedsarchitectuur: besturalgoritmen opereren in een lager-frequentie klokgebied om de bronverbruik te verlagen, terwijl de PWM-generatiemodule draait in een hoge-frequentie klokgebied om precieze timing en hoge resolutie te garanderen.
3.2 Optimalisatie en Implementatie van PWM-Besturalgoritme
Om hoge-prestatie hoge-frequentie PWM-besturing te bereiken, wordt het traditionele Ruimtevector Pulsbreedtemodulatie (SVPWM) algoritme geoptimaliseerd door een verbeterd PWM-besturalgoritme in te voeren, uitgedrukt als:

waar Ta de geleidingstijd van de bovenste tak van Fase A is; vα en vβ zijn de componenten van de referentiespanning in het α-β coördinatensysteem. Dit algoritme wordt in de FPGA geïmplementeerd met behulp van een pipeline-architectuur, waardoor complexe goniometrische berekeningen worden omgezet in eenvoudige lineaire bewerkingen. Dit vermindert aanzienlijk de berekeningstijd en stelt single-cycle uitvoering in staat. Om de doodtijdcontrole te optimaliseren, wordt een adaptieve doodtijdcompensatiestrategie toegepast.
3.3 Systeemprestatietests en Analyse
Om de superioriteit van het voorgestelde hoge-frequentie PWM-implementatieschema (hierna "voorgesteld schema") te evalueren, wordt het vergeleken met een conventionele DSP-gebaseerde implementatie (hierna "conventioneel schema"). Het testplatform is gebouwd op een Xilinx Artix-7 FPGA en een TMS320F28379D DSP, met identieke powerschakelingstopologieën en powermodules (1200 V/50 A SiC MOSFET). Prestatiemetingen omvatten de totale harmonische vervorming (THD) van de uitvoerspanning, de dynamische responsietijd, de cosinus phi en de systeemefficiëntie. Elke test wordt drie keer herhaald, met resultaten gemiddeld om betrouwbaarheid te waarborgen.
Zoals weergegeven in Tabel 1, toont het voorgestelde schema aanzienlijke voordelen boven het conventionele schema op de meeste meetpunten: de THD van de uitvoerspanning wordt teruggebracht van 8,63% naar 5,33%, een verbetering van 38,2%; de dynamische responsietijd neemt af van 428 μs naar 245 μs, een reductie van 42,5%; en de cosinus phi neemt toe van 0,91 naar 0,98. Hoewel de systeemefficiëntie slechts 0,1% verbetert, is deze marginale winst nog steeds zinvol gezien de al hoge basis-efficiëntie van meer dan 92%.

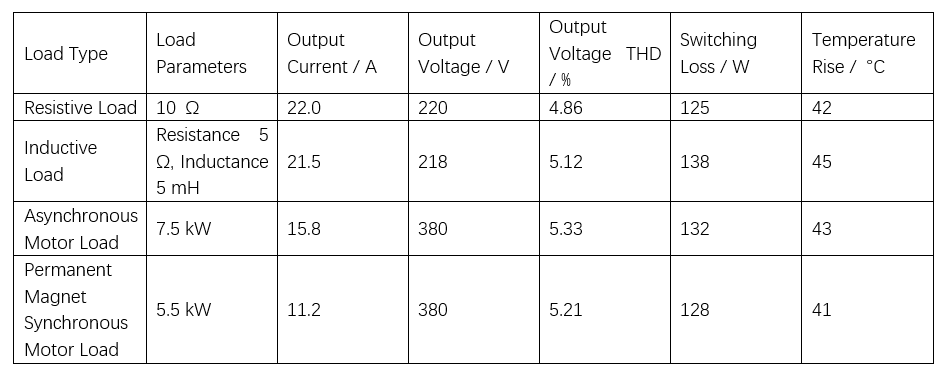
De haalbaarheid van het voorgestelde schema onder verschillende belastingsomstandigheden wordt verder getest, met resultaten gepresenteerd in Tabel 2. De tests omvatten resistieve, inductieve en motoraandrijving belastingen. De resultaten laten zien dat het voorgestelde schema stabiele prestaties behoudt over alle belastingtypes: de variatie in THD van de uitvoerspanning is slechts 0,47%, wat uitstekende robuustheid van het besturalgoritme demonstreert; de schakelverliezen blijven tussen 125 W en 138 W, met een fluctuatie van slechts 10,4%, wat effectief energiebeheer aantoont; en de temperatuurstijging wordt binnen 41–45 °C gehouden, wat superieure thermische stabiliteit bevestigt.
4 Conclusie
Hoge-frequentie PWM-technologie is een belangrijke drijvende kracht voor het verbeteren van de prestaties van omvormers, maar de implementatie ervan in elektrische besturingssystemen staat voor diverse technische uitdagingen. Dit artikel behandelt kritische problemen zoals hoge-frequentie schakelverliezen, doodtijdeffecten en poortdriverontwerp, door systematische oplossingen voor te stellen en een FPGA-gebaseerde implementatieraam te presenteren.
Het voorgestelde schema biedt hoge precisie, lage latentie en sterke real-time prestaties, waardoor zowel de dynamische respons als de stationaire nauwkeurigheid effectief worden verbeterd. Het onderzoek biedt solide technische ondersteuning voor high-performance omvormerbesturing en heeft breed toepassingspotentieel in velden zoals industriële automatisering, hernieuwbare energiegeneratie en elektrische voertuigen.










