
Hêz daniyariya bingehên kontrolê sasnîn di navbera derbarê çendina rêzan de, teknolojîya Pulse-Width Modulation (PWM) tradisyonî ya têkiliya vê teqnîkê bi rêdan wekhevîna demirgirtinê û harmonîkên nîşandar nehatiye. Berbi, teknolojîya PWM bi rêdanê bikaranîn ên da ku formê cihêrê xwazî yên destpêkirî yên dinamîk û hermonîkên nîşanbûn dikare pêk bike. Lekin, teknolojîya PWM bi rêdanê piştî gumanîna rêdanê ya carrier, da ku formê cihêrê çêrkirî biguheze û hermonîkên sistemê rekeve, performansa inverteran optimizê kir. Bibejiyê, tekmelîna efektivîyetê û bekarhêniyê ya sistemê di vê teknolojîyê de hatiye pir ast.
1. Teoriya Bingeh û Xasîyên Teknikî yên PWM bi Rêdan
Teknolojîya PWM yekemîn teqnikayê ye ku di sisteman kontrolê elektrikî yên inverteran de bikar îne bi rêdanê voltage û frequency bireguhe. Di vê teknolojîyê de, seriyên pulse an jî zanjîrek bi koybasîna signalên referans û carrier biguheze û wê bikar îne bi rêdanê switching states yên devyan guhertinê bireguhe, ji bo ku kontrolê tevlî li ser baranîya şarîka biguheze. Di kontrolê inverteran de, duty cycle D ya PWM bi amplitûdê signalê referans Vref û amplitûdê signalê carrier Vtri hevsenan:

Modulation ratio m yekemîn hesabkirina amplitûdê signalê referans bi amplitûdê signalê carrier ye. Li gorî amplitûdê signalê referans bi amplitûdê signalê carrier, wê direkta herînî value û xasîyên harmonîkên output voltage biguheze. Hesabkirina wê ye:

Carrier frequency fc li gorî rêdanê triangular wave yên ku hêsanî PWM signal biguheze. Negaresha wê direkta tiştekên dinamîk û hermonîkên output biguheze. Frequency ratio N li gorî rastîshê carrier frequency bi reference wave frequency, hesabkirina wê ye:

li gorî reference wave frequency. Teqnîka PWM bi rêdanê, li gorî carrier frequency yên bi rêdanê yên 10 kHz, yekemîn teknolojîya PWM control teknîkî yên bi rêdanê yên bi rêdanê yên 10 kHz. Ji bo inverteran modern, bi berdewamiyê performansa power device yên, carrier frequencies yan bi rêdanê yên 20 kHz û yê din. Bi zêdekirina carrier frequency, komponentên hermonîkên output yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê yên bi rêdanê...... (Dîsa nivîs kirina navendê li ser rêdanê yên bi rêdanê di navbera formulan de hatiye kopi barkirin, bibejiyê ji bo dîsa vê navendê, divê tekmelîna wê ji ber rastîşên HTML û formatan biguheze)
Cewabdarên ên da ku zêdekirina carrier frequency ji 5 kHz bi 20 kHz motor noise dikare 12–15 dB rekeve û temperature rise dikare 5–8 °C rekeve. Li gorî carrier frequency, PWM output waveform yekemîn gav lêgerî sine wave dikare be û Total Harmonic Distortion (THD) dikare rekeve. Bi carrier frequency 20 kHz, THD ya inverter output voltage dikare 5% rekeve, ku bibejiyê bêtir ye ku 8%–12% û teknolojîya PWM low-frequency. Ji bilindayî, PWM bi rêdanê kevaniyan dinamîk û kontrolê têkiliya bikar îne.
2. Pir Serafetên Implementasyonê ya PWM bi Rêdan û Çareseriyên Wê
2.1 Switching Losses Mezin û Metodên Mitigation
Serafetê mezin ên da ku hûn bi PWM bi rêdanê hene, switching losses dikare zêde bike. Li gorî switching losses power devices dikare proporsiyonal bi switching frequency, operasyon bi rêdanê dikare efektiviyetiya sistemê rekeve û demandên termal management dikare zêde bike. Switching loss Psw ya single Insulated-Gate Bipolar Transistor (IGBT) module dikare model bikin:

li gorî û turn-on û turn-off energy losses, respectively; Err reverse recovery energy; Vdc actual DC bus voltage; reference voltage; actual current; û Iref reference current.
Bi rêdanê switching losses, metoda wan dikare bikar înin:
Yekem, bikar înan devyan guhertinê mezin ên da ku Silicon Carbide Metal-Oxide-Semiconductor Field-Effect Transistors (SiC MOSFETs), ku performansa guhertinê mezin dikin IGBTên tradisyonî;
Duêm, optimalizasyonê gate driver circuit design bikar înan dual-slope drive techniques bi rêdanê switching transitions gate resistance dynamic adjustment, li gorî switching speed û electromagnetic interference (EMI);
Sêyem, soft-switching techniques, such as zero-voltage switching (ZVS) or zero-current switching (ZCS) topologies, to significantly reduce switching losses.
2.2 Dead-Time Effect û Compensation Techniques
Di operasyonê PWM bi rêdanê de, her çi absolute dead-time constant, piranîya wê li gorî switching period dikare zêde bike, dead-time effect dikare zêde bike. Vê dikare output voltage distortion, degraded low-speed performance, û torque ripple zêde bike. Ji bo effective mitigation of these issues, dead-time compensation algorithms are employed, expressed as:

3 FPGA-Based Implementation Scheme for High-Frequency PWM Technology
3.1 System Architecture Design
High-frequency PWM control imposes higher demands on the real-time performance and control precision of computing platforms. Traditional Digital Signal Processors (DSPs) often face limitations such as insufficient computational power and significant interrupt latency when implementing high-frequency PWM. In contrast, Field-Programmable Gate Arrays (FPGAs) are better suited for such applications due to their parallel processing capabilities and hardware-level implementation flexibility.
The overall architecture of the FPGA-based high-frequency PWM control system consists of four core modules: the main control unit, the PWM generation unit, the feedback signal processing unit, and the protection unit. Specifically:
Main Control Unit: Executes closed-loop control algorithms such as speed, current, and position loops;
PWM Generation Unit: Responsible for generating high-precision PWM waveforms and managing dead-time control;
Feedback Signal Processing Unit: Handles the acquisition and preprocessing of signals such as current, voltage, and position;
Protection Unit: Detects and responds to faults such as overcurrent, overvoltage, and overtemperature to ensure system safety.
The system adopts a modular design, with functional modules interconnected via standardized interfaces. Internally, the FPGA employs a dual-clock-domain architecture: control algorithms operate in a lower-frequency clock domain to reduce resource consumption, while the PWM generation module runs in a high-frequency clock domain to ensure precise timing and high resolution.
3.2 Optimization and Implementation of PWM Control Algorithm
To achieve high-performance high-frequency PWM control, the conventional Space Vector Pulse Width Modulation (SVPWM) algorithm is optimized by introducing an improved PWM control algorithm, expressed as:

where Ta is the conduction time of the upper leg of Phase A; vα and vβ are the components of the reference voltage in the α-β coordinate system. This algorithm is implemented in the FPGA using a pipelined architecture, transforming complex trigonometric computations into simple linear operations. This significantly reduces computational latency and enables single-cycle execution. To optimize dead-time control, an adaptive dead-time compensation strategy is adopted.
3.3 System Performance Testing and Analysis
To evaluate the superiority of the proposed high-frequency PWM implementation scheme (hereinafter referred to as the "proposed scheme"), it is compared with a conventional DSP-based implementation (hereinafter referred to as the "conventional scheme"). The test platform is built on a Xilinx Artix-7 FPGA and a TMS320F28379D DSP, using identical power-level circuit topologies and power modules (1200 V/50 A SiC MOSFET). Performance metrics include output voltage Total Harmonic Distortion (THD), dynamic response time, power factor, and system efficiency. Each test is repeated three times, with results averaged to ensure reliability.
As shown in Table 1, the proposed scheme demonstrates significant advantages over the conventional scheme across most metrics: output voltage THD is reduced from 8.63% to 5.33%, a 38.2% improvement; dynamic response time decreases from 428 μs to 245 μs, a 42.5% reduction; and power factor increases from 0.91 to 0.98. Although the system efficiency improves by only 0.1%, this marginal gain is still meaningful given the already high baseline efficiency exceeding 92%.

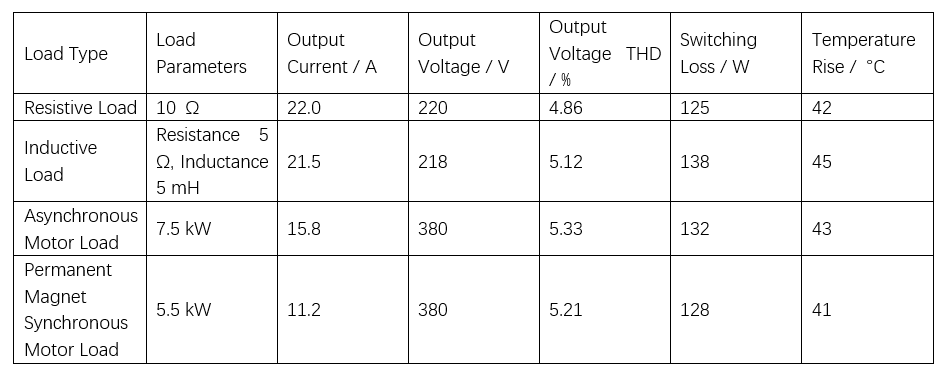
The feasibility of the proposed scheme under varying load conditions is further tested, with results presented in Table 2. The tests cover resistive, inductive, and motor loads. The results show that the proposed scheme maintains stable performance across all load types: the variation in output voltage THD is only 0.47%, demonstrating excellent robustness of the control algorithm; switching losses are maintained between 125 W and 138 W, with a fluctuation of just 10.4%, indicating effective power management; and temperature rise is kept within 41–45 °C, confirming superior thermal stability.
4 Conclusion
High-frequency PWM technology is a key enabler for enhancing inverter performance, yet its implementation in electrical control systems faces multiple technical challenges. This paper addresses critical issues such as high-frequency switching losses, dead-time effects, and driver circuit design by proposing systematic solutions and presenting an FPGA-based implementation framework.
The proposed scheme offers high precision, low latency, and strong real-time performance, effectively improving both dynamic response and steady-state accuracy. The research provides solid technical support for high-performance inverter control and holds broad application potential in fields such as industrial automation, renewable energy generation, and electric vehicles.










