
Efterfrågan på exakt kontroll i industriella processer fortsätter att öka, och traditionell pulsbreddsmodulering (PWM) teknik har svårt att uppfylla kraven på hög dynamisk prestanda och låg harmonisk distorsion. I kontrast förbättrar högfrekvens PWM utmatningsvågformens kvalitet och minskar systemets harmoniska genom att öka bärarfrekvensen, vilket optimiserar omvändares prestanda. Därför har det blivit en viktig aspekt av omvändareteknikens utveckling att balansera systemets effektivitet och tillförlitlighet vid användning av högfrekvens PWM-teknik.
1. Grundläggande teori och tekniska egenskaper hos högfrekvens PWM
PWM-teknik är den kärntechnik som används i elektriska styrsystem för omvändare för att reglera spänning och frekvens. Den genererar pulssekvenser genom att jämföra referenssignaler med bärarsignaler och använder dessa pulssekvenser för att styra strömningsstater för strömföringsenheter, vilket möjliggör exakt kontroll över strömavgiften till belastningen. I omvändarestyrning kan PWM:s tidsduty D uttryckas i relation till referensvågens amplitud Vref och bärarvågens amplitud Vtri enligt följande:

Moduleringsförhållandet m definieras som förhållandet mellan referensvågens amplitud och bärarvågens amplitud. Det påverkar direkt den effektiva värdet och de harmoniska egenskaperna hos utmatningsspänningen. Uttrycket för detta förhållande är:

Bärarfrekvensen fc hänvisar till frekvensen för den triangulära våg som används för att generera PWM-signalen. Dess värde påverkar direkt systemets dynamiska respons och distributionen av utmatningsharmoniker. Frekvensförhållandet N definieras som förhållandet mellan bärarfrekvensen och referensvågens frekvens, uttryckt som:

där är referensvågens frekvens. Högfrekvens PWM-teknik syftar vanligtvis på PWM-styrtekniker med en bärarfrekvens som överstiger 10 kHz. I moderna omvändare, med ständig förbättring av strömföringsenheters prestanda, har bärarfrekvenser nått 20 kHz eller ännu högre. Genom att öka bärarfrekvensen flyttas utmatningsharmonikerna till högre frekvensområden, vilket underlättar efterföljande filtrering och effektivt minskar motorn's buller och vibrationer.
Experiment visar att ökningen av bärarfrekvensen från 5 kHz till 20 kHz kan minska motorbuller med 12-15 dB och sänka temperaturökningen med 5-8 °C. När bärarfrekvensen ökar närmar sig PWM-utmatningsvågformen idealiska sinusvågor, och totala harmoniska distorsioner (THD) minskar betydligt. Vid en bärarfrekvens på 20 kHz sjunker THD för omvändarens utmatningsspänning till cirka 5%, vilket är betydligt bättre än de 8-12% som är typiska för lågfrekvens PWM-tekniker. Dessutom erbjuder högfrekvens PWM fördelar som snabbare dynamisk respons och högre styrnoggrannhet.
2. Nyckelutmaningar vid implementering av högfrekvens PWM och deras lösningar
2.1 Hög switching-förluster och åtgärder för att minska dem
Den mest framträdande frågan med högfrekvens PWM-teknik är den skarpa ökningen av switching-förluster. Eftersom switching-förlusterna för strömföringsenheter är proportionella mot switchingfrekvensen leder högfrekvent drift till minskad systemeffektivitet och ökade krav på termisk hantering. Switching-förlusten Psw för ett enda isolerat-gate bipolär transistor (IGBT) modul kan modelleras enligt följande:

där och är energiförlusterna vid in- och utslag respektive; Err är den reversa återhämtningsegenskapen; Vdc är den faktiska DC-busspänningen; är referensspänningen; är den faktiska strömmen; och Iref är referensströmmen.
För att undertrycka switching-förluster kan följande åtgärder vidtas:
Först, använda avancerade strömföringsenheter som siliciumkarbid metalloxidskalfäldeffektransistorer (SiC MOSFETs), vilka erbjuder bättre switchingegenskaper jämfört med traditionella IGBTs;
Andra, optimera gatdrivrutins design genom att använda dual-slope drivtekniker för att dynamiskt justera gatmotstånd under switchingövergångar, vilket balanserar switchinghastighet och elektromagnetisk interferens (EMI);
Tredje, implementera mjuk-switching-tekniker, såsom noll-spännings switching (ZVS) eller noll-ström switching (ZCS) topologier, för att betydligt minska switching-förluster.
2.2 Dead-time-effekt och kompensationsmetoder
Under högfrekvens PWM-drift, fastän den absoluta dead-tiden förblir konstant, ökar dess andel i förhållande till switchingperioden, vilket gör dead-time-effekten mer märkbar. Detta kan leda till utmatningsspänningsdistorsion, försämrad låghastighetsprestanda och ökad momentryckning. För att effektivt mildra dessa problem används dead-time-kompensationsalgoritmer, uttryckta som:

3 Implementeringsschema baserat på FPGA för högfrekvens PWM-teknik
3.1 Systemarkitekturdesign
Högfrekvens PWM-styrning ställer höga krav på beräkningsplattformers realtidsegenskaper och styrnoggrannhet. Traditionella digitala signalprocessorer (DSP) står ofta inför begränsningar som otillräcklig beräkningskraft och betydande avbrottslatens vid implementering av högfrekvens PWM. I kontrast är fältprogrammerbara gatearrayer (FPGA) bättre lämpade för sådana tillämpningar på grund av deras parallella bearbetningsförmåga och flexibilitet i hårdvarunivåimplementering.
Den totala arkitekturen för FPGA-baserade högfrekvens PWM-styrningssystem består av fyra kärnmoduler: huvudkontrollenheten, PWM-genereringsenheten, återkopplingsignalbehandlingsenheten och skyddsenheten. Specifikt:
Huvudkontrollenhet: Kör slutna loopkontrollalgoritmer som hastighet, ström och positionsslingor;
PWM-genereringsenhet: Ansvarar för att generera högnoggranna PWM-vågformer och hantera dead-time-styrning;
Återkopplingsignalbehandlingsenhet: Hanterar insamling och förbehandling av signaler som ström, spänning och position;
Skyddsenhet: Upptäcker och svarar på fel som överström, överspänning och övertemperatur för att säkerställa systemets säkerhet.
Systemet använder en modulär design, där funktionsmoduler är sammanbundna via standardiserade gränssnitt. Internt använder FPGA en två-klockdomänsarkitektur: kontrollalgoritmer körs i en lågfrekvensklockdomän för att minska resursförbrukningen, medan PWM-genereringsmodulen kör i en högfrekvensklockdomän för att säkerställa exakt timing och hög upplösning.
3.2 Optimering och implementering av PWM-styrningsalgoritm
För att uppnå högpresterande högfrekvens PWM-styrning optimeras den traditionella rumsvector pulsbreddsmodulering (SVPWM) algoritmen genom att införa en förbättrad PWM-styrningsalgoritm, uttryckt som:

där Ta är ledningsperioden för fas A:s övre gren; vα och vβ är komponenterna av referensspänningen i α-β-koordinatsystemet. Denna algoritm implementeras i FPGA med hjälp av en pipelined arkitektur, vilket omvandlar komplexa trigonometriska beräkningar till enkla linjära operationer. Detta minskar betydligt beräkningslatens och möjliggör enkelcykelutförande. För att optimera dead-time-styrning antas en adaptiv dead-time-kompensationsstrategi.
3.3 Systemprestandatest och analys
För att utvärdera föreslaget högfrekvens PWM-implementeringsschemats (härinafter kallat "föreslaget schema") överlägsenhet jämförs det med en traditionell DSP-baserad implementering (härinafter kallat "traditionellt schema"). Testplattformen bygger på en Xilinx Artix-7 FPGA och en TMS320F28379D DSP, med identiska strömnivåtopologier och strömmoduler (1200 V/50 A SiC MOSFET). Prestandamått inkluderar utmatningsspännings totala harmoniska distorsion (THD), dynamisk respons tid, effektfaktor och systemeffektivitet. Varje test upprepas tre gånger, med resultat som genomsnittas för att säkerställa tillförlitlighet.
Enligt tabell 1 visar det föreslagna schemat betydande fördelar över det traditionella schemat i de flesta mått: utmatningsspännings THD minskar från 8,63% till 5,33%, en förbättring på 38,2%; dynamisk respons tid minskar från 428 µs till 245 µs, en minskning på 42,5%; och effektfaktor ökar från 0,91 till 0,98. Även om systemeffektiviteten bara förbättras med 0,1% är denna marginala vinstdriftig eftersom den redan höga baslinjeffektiviteten överstiger 92%.

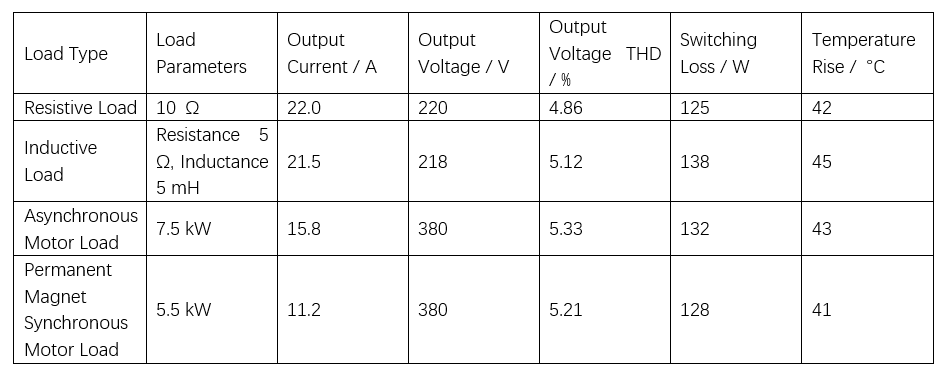
Det föreslagna schemat testas ytterligare under varierande belastningsvillkor, med resultat presenterade i tabell 2. Testerna täcker resistiv, induktiv och motorbelpastning. Resultaten visar att det föreslagna schemat bibehåller stabil prestanda över alla belastningstyper: variationen i utmatningsspännings THD är endast 0,47%, vilket visar en utmärkt robusthet hos styrningsalgoritmen; switching-förluster hålls mellan 125 W och 138 W, med en variation på endast 10,4%, vilket indikerar effektiv strömbearbetning; och temperaturökning hålls inom 41-45 °C, vilket bekräftar överlägsen termisk stabilitet.
4 Slutsats
Högfrekvens PWM-teknik är en nyckelfaktor för att förbättra omvändarens prestanda, men dess implementering i elektriska styr-system står inför flera tekniska utmaningar. I denna artikel behandlas kritiska frågor som högfrekvens switching-förluster, dead-time-effekter och drivrutinsdesign genom att föreslå systematiska lösningar och presentera en FPGA-baserad implementeringsram.
Det föreslagna schemat erbjuder hög noggrannhet, låg latens och stark realtidsegenskap, vilket effektivt förbättrar både dynamisk respons och stillastående noggrannhet. Forskningen ger solid teknisk stöd för högpresterande omvändarestyrning och har bred tillämpningspotential inom områden som industriell automatisering, förnybar energiproduktion och elbilar.










