
Alors que la demande de contrôle précis dans les processus industriels continue d'augmenter, la technologie traditionnelle de modulation de largeur d'impulsion (PWM) peine à répondre aux exigences de performance dynamique élevée et de faible distorsion harmonique. En revanche, la technologie PWM haute fréquence améliore la qualité de la forme d'onde de sortie et réduit les harmoniques du système en augmentant la fréquence porteuse, optimisant ainsi les performances des onduleurs. Par conséquent, l'équilibre entre l'efficacité et la fiabilité du système lors de l'application de la technologie PWM haute fréquence est devenue un aspect critique du développement de la technologie des onduleurs.
1. Théorie de base et caractéristiques techniques de la PWM haute fréquence
La technologie PWM est la technique centrale utilisée dans les systèmes de commande électrique des onduleurs pour réguler la tension et la fréquence. Elle génère des séquences d'impulsions en comparant des signaux de référence avec des signaux porteurs et utilise ces séquences d'impulsions pour contrôler les états de commutation des dispositifs de puissance, permettant ainsi un contrôle précis de l'alimentation électrique de la charge. Dans la commande des onduleurs, le rapport cyclique D de la PWM peut être exprimé en fonction de l'amplitude de la vague de référence Vref et de l'amplitude de la vague porteuse Vtri comme suit :

Le rapport de modulation m est défini comme le rapport de l'amplitude de la vague de référence à l'amplitude de la vague porteuse. Il influence directement la valeur efficace et les caractéristiques harmoniques de la tension de sortie. L'expression de ce rapport est :

La fréquence porteuse fc fait référence à la fréquence de la vague triangulaire utilisée pour générer le signal PWM. Sa valeur affecte directement la vitesse de réponse dynamique du système et la distribution des harmoniques de sortie. Le rapport de fréquence N est défini comme le rapport de la fréquence porteuse à la fréquence de la vague de référence, exprimé comme suit :

où est la fréquence de la vague de référence. La technologie PWM haute fréquence se réfère généralement aux techniques de commande PWM avec une fréquence porteuse dépassant 10 kHz. Dans les onduleurs modernes, avec l'amélioration continue des performances des dispositifs de puissance, les fréquences porteuses ont atteint 20 kHz ou plus. En augmentant la fréquence porteuse, les composantes harmoniques de sortie sont déplacées vers des gammes de fréquences plus élevées, facilitant le filtrage ultérieur et réduisant efficacement le bruit et les vibrations du moteur.
Les expériences montrent qu'une augmentation de la fréquence porteuse de 5 kHz à 20 kHz peut réduire le bruit du moteur de 12 à 15 dB et abaisser la hausse de température de 5 à 8 °C. À mesure que la fréquence porteuse augmente, la forme d'onde de sortie PWM s'approche davantage d'une onde sinusoïdale idéale, et la Distorsion Harmonique Totale (DHT) est considérablement réduite. À une fréquence porteuse de 20 kHz, la DHT de la tension de sortie de l'onduleur tombe à environ 5%, ce qui est nettement meilleur que les 8% à 12% typiques des techniques PWM à basse fréquence. De plus, la PWM haute fréquence offre des avantages tels qu'une réponse dynamique plus rapide et une précision de commande supérieure.
2. Principaux défis de la mise en œuvre de la PWM haute fréquence et leurs solutions
2.1 Pertes de commutation élevées et méthodes d'atténuation
Le problème le plus marquant de la technologie PWM haute fréquence est l'augmentation abrupte des pertes de commutation. Étant donné que les pertes de commutation des dispositifs de puissance sont proportionnelles à la fréquence de commutation, le fonctionnement à haute fréquence entraîne une diminution de l'efficacité du système et des exigences accrues en matière de gestion thermique. Les pertes de commutation Psw d'un module de Transistor Bipolaire à Isolation par Grille (IGBT) peuvent être modélisées comme suit :

où et sont respectivement les pertes d'énergie lors de la mise en marche et de l'arrêt ; Err est l'énergie de récupération inverse ; Vdc est la tension de bus DC réelle ; est la tension de référence ; est le courant réel ; et Iref est le courant de référence.
Pour atténuer les pertes de commutation, les mesures suivantes peuvent être adoptées :
Premièrement, utiliser des dispositifs de puissance avancés tels que les transistors à effet de champ en carbure de silicium (SiC MOSFET), qui offrent des caractéristiques de commutation supérieures aux IGBT traditionnels ;
Deuxièmement, optimiser la conception du circuit de pilotage de la grille en utilisant des techniques de pilotage à double pente pour ajuster dynamiquement la résistance de la grille pendant les transitions de commutation, équilibrant ainsi la vitesse de commutation et les interférences électromagnétiques (EMI) ;
Enfin, mettre en œuvre des techniques de commutation douce, telles que les topologies de commutation à tension nulle (ZVS) ou de commutation à courant nul (ZCS), pour réduire considérablement les pertes de commutation.
2.2 Effet de temps mort et techniques de compensation
Sous un fonctionnement PWM haute fréquence, bien que le temps mort absolu reste constant, sa proportion par rapport à la période de commutation augmente, rendant l'effet de temps mort plus prononcé. Cela peut conduire à une distorsion de la tension de sortie, à une dégradation des performances à basse vitesse et à une augmentation du ripple de couple. Pour atténuer efficacement ces problèmes, des algorithmes de compensation de temps mort sont utilisés, exprimés comme suit :

3 Schéma de mise en œuvre basé sur FPGA de la technologie PWM haute fréquence
3.1 Conception de l'architecture du système
Le contrôle PWM haute fréquence impose des exigences plus élevées en termes de performance en temps réel et de précision de commande des plateformes de calcul. Les processeurs numériques de signal (DSP) traditionnels rencontrent souvent des limitations telles qu'une puissance de calcul insuffisante et une latence d'interruption significative lors de la mise en œuvre de la PWM haute fréquence. En revanche, les tableaux de portes programmables en champ (FPGA) sont mieux adaptés à de telles applications en raison de leurs capacités de traitement parallèle et de leur flexibilité d'implémentation au niveau matériel.
L'architecture globale du système de contrôle PWM haute fréquence basé sur FPGA comprend quatre modules principaux : l'unité de contrôle principal, l'unité de génération PWM, l'unité de traitement des signaux de retour, et l'unité de protection. Spécifiquement :
Unité de contrôle principal : Exécute des algorithmes de contrôle en boucle fermée tels que les boucles de vitesse, de courant et de position ;
Unité de génération PWM : Responsable de la génération de formes d'onde PWM de haute précision et de la gestion du contrôle de temps mort ;
Unité de traitement des signaux de retour : Gère l'acquisition et le prétraitement des signaux tels que le courant, la tension et la position ;
Unité de protection : Détecte et répond aux défauts tels que le courant excessif, la tension excessive et la surtempérature pour assurer la sécurité du système.
Le système adopte une conception modulaire, avec des modules fonctionnels interconnectés via des interfaces standardisées. Internement, le FPGA emploie une architecture à double domaine de clock : les algorithmes de contrôle opèrent dans un domaine de clock de basse fréquence pour réduire la consommation de ressources, tandis que le module de génération PWM fonctionne dans un domaine de clock de haute fréquence pour assurer un timing précis et une haute résolution.
3.2 Optimisation et mise en œuvre de l'algorithme de contrôle PWM
Pour réaliser un contrôle PWM haute fréquence de haute performance, l'algorithme de modulation de largeur d'impulsion par vecteur spatial (SVPWM) traditionnel est optimisé en introduisant un algorithme de contrôle PWM amélioré, exprimé comme suit :

où Ta est le temps de conduction de la jambe supérieure de la phase A ; vα et vβ sont les composantes de la tension de référence dans le système de coordonnées α-β. Cet algorithme est implémenté dans le FPGA en utilisant une architecture pipeline, transformant des calculs trigonométriques complexes en opérations linéaires simples. Cela réduit considérablement la latence de calcul et permet une exécution en un seul cycle. Pour optimiser le contrôle de temps mort, une stratégie de compensation de temps mort adaptatif est adoptée.
3.3 Test et analyse des performances du système
Pour évaluer la supériorité du schéma de mise en œuvre de la PWM haute fréquence proposé (ci-après dénommé "schéma proposé"), il est comparé à une mise en œuvre basée sur un DSP traditionnel (ci-après dénommé "schéma traditionnel"). La plateforme de test est construite sur un FPGA Xilinx Artix-7 et un DSP TMS320F28379D, en utilisant des topologies de circuit et des modules de puissance identiques (MOSFET en carbure de silicium 1200 V/50 A). Les métriques de performance incluent la Distorsion Harmonique Totale (DHT) de la tension de sortie, le temps de réponse dynamique, le facteur de puissance et l'efficacité du système. Chaque test est répété trois fois, avec des résultats moyennés pour garantir la fiabilité.
Comme indiqué dans le tableau 1, le schéma proposé présente des avantages significatifs par rapport au schéma traditionnel sur la plupart des métriques : la DHT de la tension de sortie est réduite de 8,63% à 5,33%, soit une amélioration de 38,2% ; le temps de réponse dynamique diminue de 428 μs à 245 μs, soit une réduction de 42,5% ; et le facteur de puissance passe de 0,91 à 0,98. Bien que l'efficacité du système ne s'améliore que de 0,1%, cette amélioration marginale est néanmoins significative compte tenu de l'efficacité de base déjà élevée dépassant 92%.

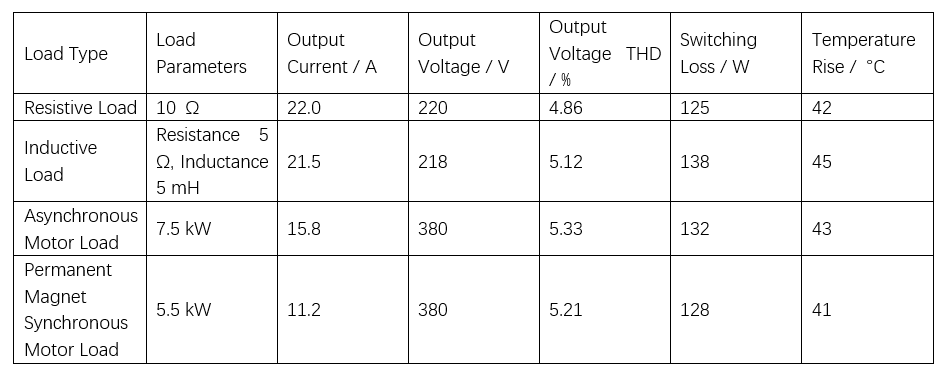
La faisabilité du schéma proposé sous différentes conditions de charge est testée, avec des résultats présentés dans le tableau 2. Les tests couvrent les charges résistives, inductives et de moteur. Les résultats montrent que le schéma proposé maintient une performance stable pour tous les types de charges : la variation de la DHT de la tension de sortie n'est que de 0,47%, démontrant une excellente robustesse de l'algorithme de commande ; les pertes de commutation sont maintenues entre 125 W et 138 W, avec une fluctuation de seulement 10,4%, indiquant une gestion efficace de la puissance ; et la hausse de température est maintenue entre 41 et 45 °C, confirmant une stabilité thermique supérieure.
4 Conclusion
La technologie PWM haute fréquence est un élément clé pour améliorer les performances des onduleurs, mais sa mise en œuvre dans les systèmes de commande électrique fait face à de nombreux défis techniques. Cet article aborde des problèmes critiques tels que les pertes de commutation à haute fréquence, les effets de temps mort et la conception des circuits de pilotage en proposant des solutions systématiques et en présentant un cadre de mise en œuvre basé sur FPGA.
Le schéma proposé offre une grande précision, une faible latence et des performances en temps réel solides, améliorant efficacement à la fois la réponse dynamique et la précision en régime permanent. La recherche fournit un soutien technique solide pour la commande d'onduleurs de haute performance et présente un potentiel d'application étendu dans des domaines tels que l'automatisation industrielle, la production d'énergie renouvelable et les véhicules électriques.










