
Som behovet for nøyaktig kontroll i industrielle prosesser fortsetter å øke, kjenner tradisjonell pulsbreddsmodulasjon (PWM) teknologi problemer med å møte kravene til høy dynamisk ytelse og lav harmonisk forvrengning. I kontrast forbedrer høyfrekvens PWM-teknologi utdatahvelvets kvalitet og reduserer systemharmonier ved å øke bærefrekvensen, dermed optimaliserer inverterens ytelse. Balansering av systemeffektivitet og pålitelighet når høyfrekvens PWM-teknologi brukes, har blitt en viktig aspekt av inverterteknologiens utvikling.
1. Grunnleggende teori og tekniske egenskaper ved høyfrekvens PWM
PWM-teknologi er den sentrale teknikken som brukes i elektriske kontrollsystemer for invertere for å regulere spenning og frekvens. Den genererer pulssekvenser ved å sammenligne referanse signaler med bæresignal, og bruker disse pulssekvensene til å kontrollere strømtilstandene for strømforbrukere, dermed oppnår nøyaktig kontroll over strømforsyningen til belastingen. I inverterkontroll kan tidsforholdet D for PWM uttrykkes i forhold til referansebølgenes amplitud Vref og bærebølgenes amplitud Vtri som følger:

Modulasjonsforholdet m defineres som forholdet mellom referansebølgens amplitud og bærebølgens amplitud. Det påvirker direkte effektivverdien og harmoniske egenskapene for utdatahvelvet. Uttrykket for dette forholdet er:

Bærefrekvensen fc refererer til frekvensen av trekantbølgen som brukes til å generere PWM-signalet. Dens verdi påvirker direkte systemets dynamiske respons tid og distribusjon av utdataharmonier. Frekvensforholdet N defineres som forholdet mellom bærefrekvensen og referansebølgens frekvens, uttrykt som:

der er referansebølgens frekvens. Høyfrekvens PWM-teknologi refererer generelt til PWM-kontrollteknikker med en bærefrekvens som overstiger 10 kHz. I moderne invertere, med jevne fremskritt i strømforbrukernes ytelse, har bærefrekvenser nådd 20 kHz eller enda høyere. Ved å øke bærefrekvensen, flyttes utdataharmonikkomponentene til høyere frekvensområder, forenkler filtrering etterpå og reduserer effektivt motorens støy og vibrasjon.
Forsøk viser at økningen av bærefrekvens fra 5 kHz til 20 kHz kan redusere motorstøy med 12–15 dB og senke temperaturstigning med 5–8 °C. Når bærefrekvensen økes, nærmer PWM-utdatahvelvet seg mer og mer en ideal sinusbølge, og total harmonisk forvrengning (THD) reduseres betydelig. Ved en bærefrekvens på 20 kHz, synker THD for inverterens utdataspenning til omtrent 5%, noe som er betydelig bedre enn de 8%–12% som typisk er for lavfrekvens PWM-teknikker. I tillegg gir høyfrekvens PWM fordeler som raskere dynamisk respons og høyere kontrollpresisjon.
2. Nøkkelfordiinger ved implementering av høyfrekvens PWM og løsninger
2.1 Høye skiftetap og metoder for demping
Den mest fremtredende utfordringen med høyfrekvens PWM-teknologi er det skarpe økningen i skiftetap. Ettersom skiftetapene for strømforbrukere er proporsjonale med skiftefrekvensen, fører høyfrekvens drift til redusert systemeffektivitet og økte krav til varmeledning. Skiftetapet Psw for en enkel isolert-gate bipolær transistor (IGBT) modul kan modelleres som følger:

der og er energitapene ved påslag og avslag, henholdsvis; Err er reverseringsenergi; Vdc er den faktiske DC-busspennings; er referansevoltage; er den faktiske strømmen; og Iref er referansestrømmen.
For å undertrykke skiftetap, kan følgende tiltak tas:
Først, bruk av avanserte strømforbrukere som silisiumkarbid metall-oksider-semileiter felt-effekt-transistorer (SiC MOSFET), som tilbyr superiore skiftetegn sammenlignet med konvensjonelle IGBT;
Andre, optimere gate driver krettsdesign ved å bruke dobbeltskjeve drivemetoder for å dynamisk justere gate motstand under skiftetiltak, dermed balansere skiftet fart og elektromagnetisk interferens (EMI);
Til slutt, implementere soft-skifting-teknikker, som nullspenningsskifting (ZVS) eller nullstrømsskifting (ZCS) topologier, for å redusere skiftetap betydelig.
2.2 Dodtidseffekt og kompensasjonsteknikker
Under høyfrekvens PWM-drift, selv om absolutt dodtid forblir konstant, øker dens andel i forhold til skiftetid, gjør dodtidseffekten mer fremtredende. Dette kan føre til utdatahvelvsforvrengning, forringet lavhastighetsyting og økt dreiemomentrykk. For å effektivt dempe disse problemene, brukes dodtidskompensasjonsalgoritmer, uttrykt som:

3 Implementeringsskjema basert på FPGA for høyfrekvens PWM-teknologi
3.1 Systemarkitekturdesign
Høyfrekvens PWM-kontroll stiller høyere krav til sanntidsytelsen og kontrollpresisjonen av beregningsplattformer. Tradisjonelle digitale signalprosessorer (DSP) møter ofte begrensninger som utilstrekkelig beregningskraft og signifikant avbrytelseslatens når de implementerer høyfrekvens PWM. I kontrast er programmerbare gatefelt (FPGA) bedre egnet for slike applikasjoner på grunn av deres parallellbehandlingskapasitet og fleksibilitet i hardwareimplementering.
Den totale arkitekturen for FPGA-basert høyfrekvens PWM-kontrollsystem består av fire kjernemoduler: hovedkontrollenheter, PWM-generasjonsenheter, tilbakemeldingsignalbehandlingsenheter og beskyttelsesenheter. Spesifikt:
Hovedkontrolleenhet: Utfører lukket sirkelkontrollalgoritmer som hastighet, strøm og posisjonsløkker;
PWM-generasjonsenhet: Ansvarlig for å generere høypræsise PWM-hvelver og håndtere dodtidskontroll;
Tilbakemeldingsignalbehandlingsenhet: Behandler akkumulering og forhåndsbehandling av signaler som strøm, spenning og posisjon;
Beskyttelsesenhet: Oppdager og reagerer på feil som overstrøm, overspenning og overtemperatur for å sikre systemets sikkerhet.
Systemet bruker et modulært design, med funksjonelle moduler forbundet via standardiserte grensesnitt. Intern, bruker FPGA en dobbelt klokke-domene arkitektur: kontrollalgoritmer opererer i et lavfrekvens klokke-domene for å redusere ressurstubing, mens PWM-generasjonsmodulen kjører i et høyfrekvens klokke-domene for å sikre presis tidsstyring og høy oppløsning.
3.2 Optimalisering og implementering av PWM-kontrollalgoritme
For å oppnå høy prestasjonshøyfrekvens PWM-kontroll, optimeres den konvensjonelle romvektor pulsbreddsmodulasjons (SVPWM) algoritmen ved å introdusere en forbedret PWM-kontrollalgoritme, uttrykt som:

der Ta er ledningsiden for fase A; vα og vβ er komponentene av referansevoltage i α-β koordinatsystem. Denne algoritmen implementeres i FPGA ved hjelp av en pipelined arkitektur, transformerer komplekse trigonometriske beregninger til enkle lineære operasjoner. Dette reduserer betydelig beregningslatens og muliggjør enkeltcyklusutførelse. For å optimalisere dodtidskontroll, adopteres en adaptiv dodtidskompensasjonstrategi.
3.3 Systemytelsestesting og analyse
For å evaluere overlegenheten til foreslått høyfrekvens PWM-implementeringsskjema (heretter referert til som "foreslått skjema"), sammenlignes det med en konvensjonell DSP-basert implementering (heretter referert til som "konvensjonelt skjema"). Testplattformen bygger på en Xilinx Artix-7 FPGA og en TMS320F28379D DSP, bruker identiske strømnivåkretstopologier og strømmoduler (1200 V/50 A SiC MOSFET). Ytelsesindikatorer inkluderer utdatahvelvets total harmonisk forvrengning (THD), dynamisk responstid, effektfaktor og systemeffektivitet. Hver test gjentas tre ganger, med resultater gjennomsnittet for å sikre pålitelighet.
Som vist i tabell 1, demonstrerer foreslått skjema betydelige fordeler over konvensjonelt skjema på de fleste indikatorer: utdatahvelvets THD reduseres fra 8.63% til 5.33%, en 38.2% forbedring; dynamisk responstid reduseres fra 428 μs til 245 μs, en 42.5% reduksjon; og effektfaktor økes fra 0.91 til 0.98. Selv om systemeffektiviteten bare forbedres med 0.1%, er denne marginalle gainen fortsatt meningsfull gitt allerede høy basiseffektivitet som overstiger 92%.

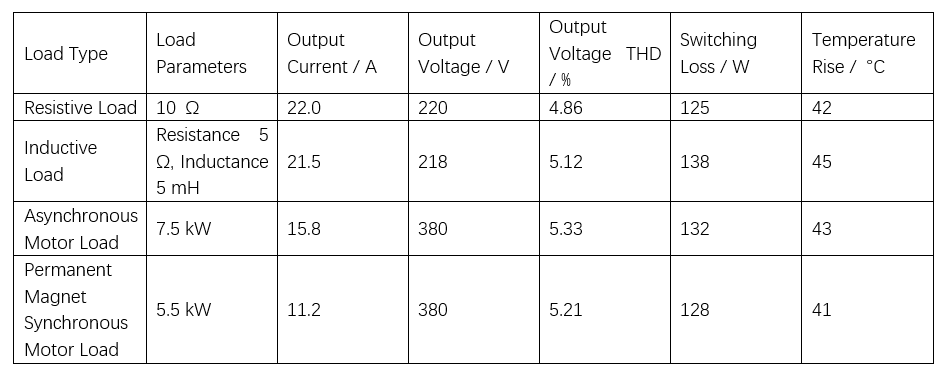
Foreslått skjemas gjennomførbarehet under variende belastningsforhold testeres videre, med resultater presentert i tabell 2. Testene dekker resistive, induktive og motorbelslasting. Resultatene viser at foreslått skjema opprettholder stabil ytelse over alle belastningstyper: variasjonen i utdatahvelvets THD er bare 0.47%, demonstrerer excellent robusthet av kontrollalgoritmen; skiftetap holdes mellom 125 W og 138 W, med en fluktuerasjon på bare 10.4%, indikerer effektiv strømforvaltning; og temperaturstigning holdes innen 41–45 °C, bekrefter superiør termisk stabilitet.
4 Konklusjon
Høyfrekvens PWM-teknologi er en nøkkelenabler for å forbedre inverterens ytelse, men dens implementering i elektriske kontrollsystemer står overfor flere tekniske utfordringer. Denne artikkelen adresserer kritiske spørsmål som høyfrekvens skiftetap, dodtidseffekter og driverkrettsdesign, ved å foreslå systematiske løsninger og presentere et FPGA-basert implementeringsrammeverk.
Foreslått skjema tilbyr høy præsjon, lav latens og sterkt sanntidsytelse, forbedrer effektivt både dynamisk respons og stabilt præsjonsnivå. Forskningen gir solid teknisk støtte for høyprestasjonsinverterkontroll og har bred anvendelsespotensial i felt som industriell automatisering, fornybar energiproduksjon og elektriske kjøretøy.










