
産業プロセスにおける精密制御の需要が高まるにつれて、従来のパルス幅変調(PWM)技術は、高いダイナミック性能と低調波歪みの要件を満たすことが難しくなっています。これに対し、高周波PWM技術はキャリア周波数を上げることで出力波形の品質を向上させ、システムの調波を減少させるため、インバータの性能を最適化します。したがって、高周波PWM技術を適用する際のシステム効率と信頼性のバランスは、インバータ技術開発において重要な側面となっています。
1. 高周波PWMの基本理論と技術的特性
PWM技術は、インバータの電気制御システムで使用されるコア技術であり、電圧と周波数を制御するために使用されます。これは参照信号とキャリア信号を比較してパルス列を生成し、これらのパルス列を使用してパワー装置のスイッチング状態を制御することで、負荷への電源供給を精密に制御します。インバータ制御では、PWMのデューティ比Dは、参照波振幅Vrefとキャリア波振幅Vtriとの関係で表現することができます:

変調比mは、参照波振幅とキャリア波振幅の比率として定義され、出力電圧の有効値と調波特性に直接影響します。この比率の式は以下の通りです:

キャリア周波数fcは、PWM信号を生成するために使用される三角波の周波数を指します。その値はシステムのダイナミック応答速度と出力調波の分布に直接影響します。周波数比Nは、キャリア周波数と参照波周波数の比率として定義され、以下のように表されます:

ここでは参照波周波数です。高周波PWM技術は一般に、キャリア周波数が10kHzを超えるPWM制御技術を指します。現代のインバータでは、パワー装置の性能が継続的に改善され、キャリア周波数は20kHz以上に達しています。キャリア周波数を上げることで、出力調波成分はより高い周波数範囲にシフトし、後続のフィルタリングが容易になり、モーターの騒音と振動が効果的に減少します。
実験により、キャリア周波数を5kHzから20kHzに増加させることで、モーターの騒音を12〜15dB減らし、温度上昇を5〜8°C低下させることができます。キャリア周波数が増加すると、PWM出力波形は理想的な正弦波に近づき、総調波歪(THD)が大幅に減少します。キャリア周波数20kHzでは、インバータ出力電圧のTHDは約5%に低下し、低周波PWM技術の典型的な8%〜12%よりも大幅に改善されます。さらに、高周波PWMは高速ダイナミック応答と高い制御精度などの利点も提供します。
2. 高周波PWMの実装における主要な課題とその解決策
2.1 高いスイッチング損失と軽減方法
高周波PWM技術の最も顕著な問題は、スイッチング損失の急激な増加です。パワー装置のスイッチング損失はスイッチング周波数に比例するため、高周波動作ではシステム効率が低下し、熱管理に対する要求が高まります。単一の絶縁ゲートバイポーラトランジスタ(IGBT)モジュールのスイッチング損失Pswは以下のモデルで表されます:

ここでおよび はそれぞれオン時およびオフ時のエネルギー損失、Errは逆回復エネルギー、Vdcは実際のDCバス電圧、は参照電圧、は実際の電流、Irefは参照電流です。
スイッチング損失を抑制するためには、以下の対策が採用できます:
まず、シリコンカーバイドメタル酸化物半導体場効トランジスタ(SiC MOSFET)のような高度なパワー装置を使用することで、従来のIGBTよりも優れたスイッチング特性を実現します;
次に、ゲートドライバ回路設計を最適化し、スイッチング遷移中にゲート抵抗を動的に調整する二段階駆動技術を採用することで、スイッチング速度と電磁干渉(EMI)のバランスを取ります;
最後に、ゼロ電圧スイッチング(ZVS)またはゼロ電流スイッチング(ZCS)トポロジーなどのソフトスイッチング技術を導入することで、スイッチング損失を大幅に削減します。
2.2 デッドタイム効果と補償技術
高周波PWM動作下では、絶対的なデッドタイムは一定ですが、スイッチング周期に対する割合が増大し、デッドタイム効果が顕著になります。これは出力電圧の歪み、低速性能の劣化、トルクリップルの増大につながります。これらの問題を効果的に軽減するため、デッドタイム補償アルゴリズムが使用され、以下のように表現されます:

3 FPGAベースの高周波PWM技術の実装スキーム
3.1 システムアーキテクチャ設計
高周波PWM制御は、計算プラットフォームのリアルタイム性能と制御精度に高い要求を課します。従来のデジタル信号プロセッサ(DSP)は、高周波PWMの実装において計算能力不足や中断遅延が大きな制限となります。一方、フィールドプログラマブルゲートアレイ(FPGA)は並列処理能力とハードウェアレベルでの実装の柔軟性から、このようなアプリケーションに適しています。
FPGAベースの高周波PWM制御システムの全体的なアーキテクチャは、主制御ユニット、PWM生成ユニット、フィードバック信号処理ユニット、保護ユニットの4つの核心モジュールで構成されています。具体的には:
主制御ユニット: 速度、電流、位置ループなどの閉ループ制御アルゴリズムを実行します;
PWM生成ユニット: 高精度のPWM波形の生成とデッドタイム制御を担当します;
フィードバック信号処理ユニット: 電流、電圧、位置などの信号の取得と前処理を行います;
保護ユニット: 過電流、過電圧、過熱などの障害を検出し対応し、システムの安全性を確保します。
システムはモジュラー設計を採用しており、機能モジュール間は標準化されたインターフェースで接続されています。内部的には、FPGAは双クロックドメインアーキテクチャを採用しています:制御アルゴリズムはリソース消費を抑えるために低周波クロックドメインで動作し、PWM生成モジュールは正確なタイミングと高解像度を確保するために高周波クロックドメインで動作します。
3.2 PWM制御アルゴリズムの最適化と実装
高性能な高周波PWM制御を達成するため、従来の空間ベクトルパルス幅変調(SVPWM)アルゴリズムを改良したPWM制御アルゴリズムを導入し、以下のように表現されます:

ここでTaはフェーズAの上腕の導通時間、vαとvβはα-&β;座標系における参照電圧の成分です。このアルゴリズムはFPGAでパイプラインアーキテクチャを用いて実装され、複雑な三角関数演算を単純な線形演算に変換します。これにより計算遅延が大幅に減少し、単サイクル実行が可能になります。デッドタイム制御の最適化には、適応型デッドタイム補償戦略が採用されています。
3.3 システム性能テストと分析
提案された高周波PWM実装スキーム(以下、「提案スキーム」と呼ぶ)の優位性を評価するため、従来のDSPベースの実装(以下、「従来スキーム」と呼ぶ)と比較しました。テストプラットフォームはXilinx Artix-7 FPGAとTMS320F28379D DSPを用いて構築され、同一のパワーレベル回路トポロジとパワーモジュール(1200 V/50 A SiC MOSFET)を使用しています。性能指標には出力電圧の総調波歪(THD)、ダイナミック応答時間、力率、システム効率が含まれます。各テストは3回繰り返され、結果は平均化されて信頼性を確保しています。
表1に示すように、提案スキームは多くの指標で従来スキームに比べて大幅な優位性を示しています:出力電圧THDは8.63%から5.33%に減少し、38.2%の改善が見られました;ダイナミック応答時間は428 μsから245 μsに減少し、42.5%の短縮が見られました;力率は0.91から0.98に増加しました。システム効率はわずか0.1%しか向上しませんでしたが、既に92%を超える基準効率を考えると、この微小な改善も意味があります。

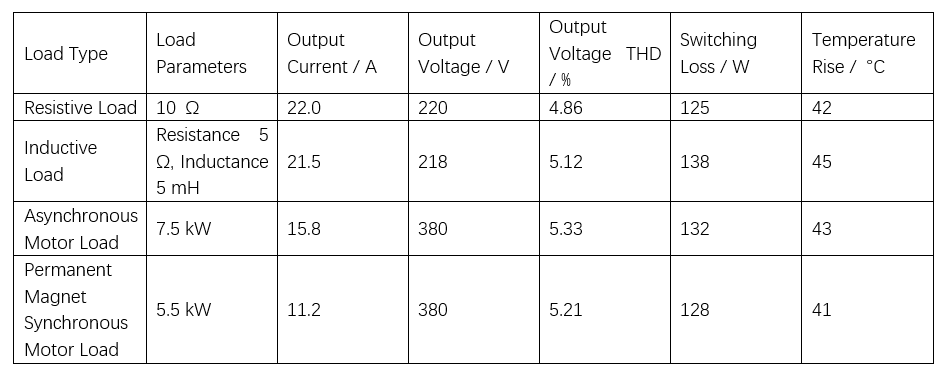
提案スキームの様々な負荷条件での実用性はさらにテストされ、結果は表2に示されています。テストは抵抗負荷、インダクティブ負荷、モータ負荷をカバーしています。結果によれば、提案スキームは全ての負荷タイプで安定した性能を維持しており、出力電圧THDの変動は僅か0.47%であり、制御アルゴリズムの優れた堅牢性が確認されました;スイッチング損失は125 Wから138 Wの間で保持され、変動は10.4%に過ぎず、効果的なパワーマネージメントが確認されました;温度上昇は41〜45 °Cの範囲内に保たれ、優れた熱安定性が確認されました。
4 結論
高周波PWM技術はインバータ性能を向上させる重要な要素ですが、電気制御システムにおけるその実装には多くの技術的課題が伴います。本稿では、高周波スイッチング損失、デッドタイム効果、ドライバ回路設計など、重要な課題に対して体系的な解決策を提案し、FPGAベースの実装フレームワークを提示しました。
提案スキームは高精度、低遅延、強力なリアルタイム性能を提供し、ダイナミック応答と定常状態精度を効果的に改善します。本研究は高性能インバータ制御に堅固な技術的支援を提供し、産業自動化、再生可能エネルギー発電、電気自動車など広範な分野での応用可能性を持っています。










