
Kuna nõudlus täpseks kontrolliks tööstusprotsessides jätkab kasvamist, on traditsiooniline pulseeriva laiuse modulatsiooni (PWM) tehnoloogia üha raskemini vastu tulema kõrgele dünaamilisele jõudlusele ja madalatele harmonilistele komponentidele. Vastupidi sellele parandab kõrgete sagedustega PWM tehnoloogia väljundlaine kvaliteeti ja vähendab süsteemi harmonilisi komponente suurendades viitlussagedust, mis optimeerib inverterite jõudlust. Seetõttu on kõrgete sagedustega PWM tehnoloogia rakendamisel süsteemi efektiivsuse ja usaldusväärsuse tasakaalu saavutamine muutunud inverterite arenduses oluliseks aspektiks.
1. Kõrgete sagedustega PWM põhiteooria ja tehnilised omadused
PWM tehnoloogia on inverterite elektrilistes juhtimissüsteemides kasutatav peamine meetod, mille abil reguleeritakse voltaget ja sagedust. See genereerib pulssijadasid võrreldes viite- ja viitlussignaalidega ning kasutab neid pulssijadasid, et kontrollida võimsusseadmete lülitust olekuid, saavutades nii täpse kontrolli tarbija varustamise üle. Inverterite juhtimisel saab PWM-päis D väljendada seoses viitesignaali amplituudiga Vref ja viitlussignaali amplituudiga Vtri järgmiselt:

Modulatsioonisuhe m defineeritakse viitesignaali amplituudi ja viitlussignaali amplituudi suhtena. See mõjutab otse väljundvoltahe efektiivset väärtust ja harmonilisi omadusi. Selle suhte väljend on:

Viitlussagedus fc viitab kolmnurklainete sagedusele, mida kasutatakse PWM signaali genereerimiseks. Selle väärtus mõjutab otse süsteemi dünaamilist vastust ja väljundharmonikate levikut. Sagedussuhe N defineeritakse viitlussageduse ja viitesignaali sageduse suhtena, väljendudes järgmiselt:

kus f1 on viitesignaali sagedus. Kõrgete sagedustega PWM tehnoloogiaga mõeldakse tavaliselt PWM juhtimismeetodeid, kus viitlussagedus ületab 10 kHz. Kaasaegsetes inverterites, kus võimsusseadmete jõudlus on pidevalt paranenud, on viitlussagedused jõudnud 20 kHz või isegi kõrgemale. Viitlussageduse tõstmisel viiakse väljundharmonikad kõrgematesse sagedusvaldkondadesse, mis hõlbustab edasist filtrimist ja vähendab efektiivselt moitori müra ja vibratsioone.
Kooskõlas eksperimentidega, kui viitlussagedus tõstetakse 5 kHz-st 20 kHz-ni, siis võimaldab see vähendada moitori müra 12–15 dB ja soojenemist 5–8 °C. Kui viitlussagedus kasvab, läheneb PWM väljundlaine rohkem ideaalsele sinusoidile ja kokkuhoiu harmoniliste komponentide (THD) osakaal väheneb oluliselt. 20 kHz viitlussagedusel langeb inverteri väljundvoltahe THD ligikaudu 5%, mis on oluliselt parem kui madalate sagedustega PWM meetodite tavaline 8%–12%. Lisaks pakub kõrgete sagedustega PWM eeliseid nagu kiirem dünaamiline vastus ja kõrgem kontrollitavus.
2. Kõrgete sagedustega PWM rakendamise olulised väljakutsed ja nende lahendused
2.1 Kõrgeid lülituskaotusi ja nende vähendamise meetodid
Kõige selgem probleem kõrgete sagedustega PWM tehnoloogias on lülituskaotuste terav kasv. Kuna võimsusseadmete lülituskaotused on proportsionaalsed lülitussagedusega, viib kõrge sagedus süsteemi efektiivsuse languse ja termilise haldamise nõudmiste kasvu. Ühe eraldi isolatsiooniga-lüliti-bipolaarse transistori (IGBT) mooduli lülituskaotus Psw modelleeritakse järgmiselt:

kus Eon ja Eoff on vastavalt sisse- ja väljalülitusenergia kaotused; Err on reserveeringu energia; Vdc on tegelik DC busi voltag; Vref on viitevoltahe; Ic on tegelik vool; ja Iref on viitevool.
Lülituskaotuste vähendamiseks võidakse kasutada järgmisi meetodeid:
Esiteks, kasutada edasiarendatud võimsusseadmeid, näiteks silitsiumkarbii metall-oxydi-seemneristvälja-transistoreid (SiC MOSFETsid), mis pakuvad paremaid lülitusomadusi kui tavalised IGBTsid;
Teiseks, optimiseerida portahju kontrolleri sirge disaini, kasutades kahekordset kaldjoontehnikat, et dünaamiliselt kohandada portahju vastust lülitusüleminekul, seostades lülituskiiruse ja elektromagnetilise interferentsi (EMI);
Lõpuks, rakendada pehme lülitustehnikaid, näiteks nullvoltaga lülitumine (ZVS) või nullvooluga lülitumine (ZCS) topoloogiate abil, mis vähendavad lülituskaotusi oluliselt.
2.2 Surmaajaefekt ja kompenseerimismeetodid
Kõrgete sagedustega PWM režiimis, kuigi absoluutne surmaaja jääb samaks, suureneb selle osakaal lülitusaajal, mis muudab surmaajaefekti olulisemaks. See võib põhjustada väljundvoltahe vääringut, halvenuda madala kiiruse jõudlus ja suureneda torque ripple. Nende probleemide efektiivseks leevendamiseks kasutatakse surmaajakompenseerimisalgoritme, mida väljendatakse järgmiselt:

3 Kõrgete sagedustega PWM tehnoloogia rakendamise skeem FPGA-alusel
3.1 Süsteemi arhitektuuride disain
Kõrgete sagedustega PWM kontrollil on kõrgemad nõuded arvutusplatvormide reaalajas jõudlusele ja kontrollitavusele. Tavalised digitaalsed signaaliprotsessorid (DSP) on sageli piiratud, näiteks ebapiisava arvutusvõime ja suure interrupti viivitusena, kui rakendatakse kõrgete sagedustega PWM. Vastupidiselt FPGA-d sobivad sellistele rakendustele paremini, kuna neil on paralleelne töötlusvõime ja riistvara tasandi implementeerimise paindlikkus.
FPGA-aluse kõrgete sagedustega PWM kontrollisüsteemi üldine arhitektuur koosneb neljast põhimoodulist: peamisest kontrollimoodulist, PWM genereerimismoodulist, tagasiside signaalide töötlemismoodulist ja kaitsemoodulist. Konkreetsemalt:
Peamine kontrollimoodul: täidab kinnist ringi kontrollialgoritme, nagu kiirus-, voolu- ja asukoha tsüklid;
PWM genereerimismoodul: vastutab kõrgete täpsusega PWM lainete genereerimise eest ja surmaaja kontrolli eest;
Tagasiside signaalide töötlemismoodul: haldab signaalide, nagu vool, voltaage ja asukoht, andmise ja eeltöötlemise;
Kaitsemoodul: tuvastab ja reageerib vigadele, nagu ülevool, ülevoltaage ja ülelämmine, et tagada süsteemi ohutus.
Süsteem kasutab modularset disaini, kus funktsionaalsed moodulid on ühendatud standardiseeritud liideste kaudu. FPGA sisemises arhitektuuris kasutatakse kahekordset kelladomeeni: kontrollialgoritmid töötavad madalamas kelladomeenis, et vähendada ressursside tarbimist, samas kui PWM genereerimismoodul töötab kõrgemas kelladomeenis, et tagada täpne ajastamine ja kõrge resolutsioon.
3.2 PWM kontrollialgoritmi optimiseerimine ja rakendamine
Kõrgete jõudlusega kõrgete sagedustega PWM kontrolli saavutamiseks on tavaline ruumvektor pulseeriva laiuse modulatsiooni (SVPWM) algoritm optimeeritud, sisseviies parandatud PWM kontrollialgoritmi, mida väljendatakse järgmiselt:

kus Ta on faasi A ülemise käte juhtimisaeg; vα ja vβ on viitevoltahe komponendid α-β koordinaatsüsteemis. See algoritm on FPGA-s rakendatud pipelined-arhitektuuriga, transformeerides keerukad trigonomeetrilised arvutused lihtsate lineaarsete operatsioonideks. See vähendab oluliselt arvutusviivitust ja võimaldab ühe tsükli täitmist. Surmaaja kontrolli optimeerimiseks kasutatakse adaptiivset surmaajakompenseerimisstrateegiat.
3.3 Süsteemi jõudluse testimine ja analüüs
Et hinnata esitatud kõrgete sagedustega PWM rakendamise skeemi (edaspidi "esitatud skeem") eelistusi, võrreldakse seda tavalise DSP-aluse rakendusega (edaspidi "tavaline skeem"). Testplaatvorm on ehitatud Xilinx Artix-7 FPGA ja TMS320F28379D DSP alusel, kasutades sama võimsusastme elektronikaskeeme ja võimsusmoduleid (1200 V/50 A SiC MOSFET). Jõudluse näitajad hõlmavad väljundvoltahe kokkuhoiu harmoniliste komponentide (THD), dünaamilise vastuse aega, võimsusfaktorit ja süsteemi efektiivsust. Igat testi kordatakse kolm korda, tulemused keskmistatakse, et tagada usaldusväärsus.
Nagu tabel 1 näitab, näitab esitatud skeem olulisi eelistusi enamiku näitajate osas: väljundvoltahe THD väheneb 8,63%st 5,33%ni, 38,2% parandus; dünaamilise vastuse aeg väheneb 428 μs-st 245 μs-ni, 42,5% vähendus; ja võimsusfaktor tõuseb 0,91-st 0,98-ni. Kuigi süsteemi efektiivsus paraneb ainult 0,1%, on see marginaalne kasu endiselt mõistlik, arvestades juba kõrget baaslinet efektiivsust, mis ületab 92%.

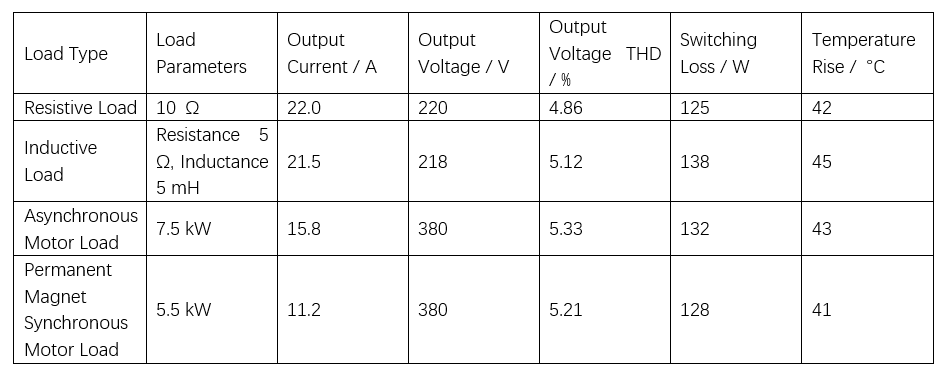
Esitatud skeemi läbiviimise võimet erinevatel koormustel testimiseks on tehtud lisa katseid, mille tulemused on esitatud tabel 2-s. Katseid hõlmab vastavalt vastav, induktiivne ja mootorikoormus. Tulemused näitavad, et esitatud skeem säilitab stabiilset jõudlust kõigis koormustüüpides: väljundvoltahe THD variatsioon on vaid 0,47%, näitades kontrollialgoritmi väga hea robustsust; lülituskaotused on hoitud 125 W-st 138 W-ni, variatsiooniga vaid 10,4%, näitades tõhusat võimu haldamist; ja temperatuuri tõus on hoidud 41–45 °C vahel, kinnitades suurepärast soojendusstabiilsust.
4 Järeldus
Kõrgete sagedustega PWM tehnoloogia on oluline võimalus inverterite jõudluse tõstmiseks, kuid selle rakendamisel elektrilistes juhtimissüsteemides tekivad mitmed tehnilised väljakutsed. See artikkel lahendab olulisi küsimusi, nagu kõrgete sagedustega lülituskaotused, surmaajaefekt ja juhtimiskiirustingide disain, esitades süsteemsed lahendused ja FPGA-aluse rakendamisraamistiku.
Esitatud skeem pakub kõrget täpsust, madalat viivitust ja tugevat reaalajas jõudlust, tõstab nii dünaamilist vastust kui ka stabiilse staatuse täpsust. Uuring annab solidaarset tehnilist toetust kõrgete jõudlusega inverterite kontrolli jaoks ning pakub laia rakendusalast potentsiaali valdkondades, nagu tööstusautomaatika, taastuvenergia tootmine ja elektriajad.










