
Dengan meningkatnya permintaan untuk kontrol yang tepat dalam proses industri, teknologi Pulse-Width Modulation (PWM) tradisional semakin sulit memenuhi kebutuhan untuk kinerja dinamis tinggi dan distorsi harmonik rendah. Sebaliknya, teknologi PWM frekuensi tinggi meningkatkan kualitas gelombang output dan mengurangi harmonisa sistem dengan meningkatkan frekuensi pembawa, sehingga mengoptimalkan kinerja inverter. Oleh karena itu, menyeimbangkan efisiensi sistem dan keandalan saat menerapkan teknologi PWM frekuensi tinggi telah menjadi aspek kritis dalam pengembangan teknologi inverter.
1. Teori Dasar dan Karakteristik Teknis PWM Frekuensi Tinggi
Teknologi PWM adalah teknik inti yang digunakan dalam sistem kendali elektrik inverter untuk mengatur tegangan dan frekuensi. Teknologi ini menghasilkan urutan pulsa dengan membandingkan sinyal referensi dengan sinyal pembawa dan menggunakan urutan pulsa tersebut untuk mengendalikan keadaan peralihan perangkat daya, sehingga mencapai kontrol yang tepat terhadap pasokan daya ke beban. Dalam kendali inverter, siklus kerja D dari PWM dapat dinyatakan berhubungan dengan amplitudo gelombang referensi Vref dan amplitudo gelombang pembawa Vtri sebagai berikut:

Rasio modulasi m didefinisikan sebagai rasio antara amplitudo gelombang referensi terhadap amplitudo gelombang pembawa. Rasio ini secara langsung mempengaruhi nilai efektif dan karakteristik harmonika tegangan output. Ekspresi untuk rasio ini adalah:

Frekuensi pembawa fc merujuk pada frekuensi gelombang segitiga yang digunakan untuk menghasilkan sinyal PWM. Nilainya secara langsung mempengaruhi kecepatan respons dinamis sistem dan distribusi harmonika output. Rasio frekuensi N didefinisikan sebagai rasio antara frekuensi pembawa terhadap frekuensi gelombang referensi, dinyatakan sebagai:

di mana adalah frekuensi gelombang referensi. Teknologi PWM frekuensi tinggi umumnya merujuk pada teknik kendali PWM dengan frekuensi pembawa melebihi 10 kHz. Dalam inverter modern, dengan peningkatan berkelanjutan dalam kinerja perangkat daya, frekuensi pembawa telah mencapai 20 kHz atau bahkan lebih tinggi. Dengan meningkatkan frekuensi pembawa, komponen harmonika output dipindahkan ke rentang frekuensi yang lebih tinggi, memudahkan penyaringan selanjutnya dan secara efektif mengurangi kebisingan dan getaran motor.
Eksperimen menunjukkan bahwa peningkatan frekuensi pembawa dari 5 kHz hingga 20 kHz dapat mengurangi kebisingan motor sebesar 12-15 dB dan menurunkan kenaikan suhu sebesar 5-8 °C. Seiring dengan peningkatan frekuensi pembawa, gelombang output PWM semakin mendekati gelombang sinus ideal, dan Distorsi Harmonika Total (THD) berkurang secara signifikan. Pada frekuensi pembawa 20 kHz, THD tegangan output inverter turun hingga sekitar 5%, yang jauh lebih baik daripada 8%-12% yang biasanya ditunjukkan oleh teknik PWM frekuensi rendah. Selain itu, PWM frekuensi tinggi menawarkan keuntungan seperti respons dinamis yang lebih cepat dan akurasi kendali yang lebih tinggi.
2. Tantangan Utama dalam Implementasi PWM Frekuensi Tinggi dan Solusinya
2.1 Rugi Perubahan Status Tinggi dan Metode Pengurangan
Masalah paling menonjol dengan teknologi PWM frekuensi tinggi adalah peningkatan tajam rugi perubahan status. Karena rugi perubahan status perangkat daya sebanding dengan frekuensi perubahan status, operasi frekuensi tinggi menyebabkan efisiensi sistem berkurang dan tuntutan manajemen termal meningkat. Rugi perubahan status Psw dari satu modul Transistor Bipolar Gerbang Terisolasi (IGBT) dapat dimodelkan sebagai berikut:

di mana dan adalah rugi energi saat hidup dan mati, masing-masing; Err adalah energi pemulihan balik; Vdc adalah tegangan bus DC sebenarnya; adalah tegangan referensi; adalah arus sebenarnya; dan Iref adalah arus referensi.
Untuk menekan rugi perubahan status, langkah-langkah berikut dapat diambil:
Pertama, gunakan perangkat daya canggih seperti Transistor Efek Medan Metal-Oksida Berbasis Karbida Silikon (SiC MOSFET), yang menawarkan karakteristik perubahan status yang lebih unggul dibandingkan IGBT konvensional;
Kedua, optimalkan desain rangkaian driver gerbang dengan menggunakan teknik drive dua kemiringan untuk menyesuaikan resistansi gerbang secara dinamis selama transisi perubahan status, sehingga menyeimbangkan kecepatan perubahan status dan gangguan elektromagnetik (EMI);
Terakhir, implementasikan teknik perubahan status lunak, seperti topologi perubahan status nol-tegangan (ZVS) atau perubahan status nol-arus (ZCS), untuk secara signifikan mengurangi rugi perubahan status.
2.2 Efek Waktu Mati dan Teknik Kompensasi
Dalam operasi PWM frekuensi tinggi, meskipun waktu mati absolut tetap konstan, proporsinya relatif terhadap periode perubahan status meningkat, membuat efek waktu mati lebih menonjol. Hal ini dapat menyebabkan distorsi tegangan output, penurunan kinerja pada kecepatan rendah, dan peningkatan ripple torsi. Untuk mengurangi masalah-masalah ini secara efektif, algoritma kompensasi waktu mati digunakan, dinyatakan sebagai:

3 Skema Implementasi Teknologi PWM Frekuensi Tinggi Berbasis FPGA
3.1 Desain Arsitektur Sistem
Kontrol PWM frekuensi tinggi menuntut kinerja real-time dan presisi kendali platform komputasi yang lebih tinggi. Prosesor Sinyal Digital (DSP) tradisional sering menghadapi keterbatasan seperti daya komputasi yang tidak cukup dan latensi interupsi yang signifikan saat menerapkan PWM frekuensi tinggi. Sebaliknya, Field-Programmable Gate Arrays (FPGA) lebih cocok untuk aplikasi semacam itu karena kapabilitas pemrosesan paralel dan fleksibilitas implementasi pada tingkat hardware.
Arsitektur keseluruhan sistem kontrol PWM frekuensi tinggi berbasis FPGA terdiri dari empat modul inti: unit kontrol utama, unit pembangkit PWM, unit pemrosesan sinyal umpan balik, dan unit perlindungan. Secara spesifik:
Unit Kontrol Utama: Menjalankan algoritma kontrol loop tertutup seperti kecepatan, arus, dan posisi;
Unit Pembangkit PWM: Bertanggung jawab untuk menghasilkan gelombang PWM berpresisi tinggi dan mengelola kontrol waktu mati;
Unit Pemrosesan Sinyal Umpan Balik: Menangani pengambilan dan prapemrosesan sinyal seperti arus, tegangan, dan posisi;
Unit Perlindungan: Mendeteksi dan menanggapi gangguan seperti arus berlebih, tegangan berlebih, dan suhu berlebih untuk memastikan keamanan sistem.
Sistem mengadopsi desain modular, dengan modul fungsional saling terhubung melalui antarmuka standar. Secara internal, FPGA menggunakan arsitektur dual-domain jam: algoritma kontrol beroperasi dalam domain jam frekuensi rendah untuk mengurangi konsumsi sumber daya, sementara modul pembangkit PWM beroperasi dalam domain jam frekuensi tinggi untuk memastikan timing yang tepat dan resolusi tinggi.
3.2 Optimalisasi dan Implementasi Algoritma Kendali PWM
Untuk mencapai kendali PWM frekuensi tinggi berkinerja tinggi, algoritma Pulse Width Modulation Vektor Ruang (SVPWM) konvensional dioptimalkan dengan memperkenalkan algoritma kendali PWM yang ditingkatkan, dinyatakan sebagai:

di mana Ta adalah waktu konduksi kaki atas Fasa A; vα dan vβ adalah komponen tegangan referensi dalam sistem koordinat α-&β;. Algoritma ini diimplementasikan dalam FPGA menggunakan arsitektur pipelined, mengubah perhitungan trigonometri yang kompleks menjadi operasi linear sederhana. Ini secara signifikan mengurangi latency komputasi dan memungkinkan eksekusi dalam satu siklus. Untuk mengoptimalkan kontrol waktu mati, strategi kompensasi waktu mati adaptif diadopsi.
3.3 Pengujian dan Analisis Kinerja Sistem
Untuk mengevaluasi keunggulan skema implementasi PWM frekuensi tinggi yang diusulkan (selanjutnya disebut "skema yang diusulkan"), skema tersebut dibandingkan dengan implementasi berbasis DSP konvensional (selanjutnya disebut "skema konvensional"). Platform uji dibangun pada Xilinx Artix-7 FPGA dan TMS320F28379D DSP, menggunakan topologi sirkuit level daya dan modul daya (1200 V/50 A SiC MOSFET) yang identik. Metrik kinerja termasuk Distorsi Harmonika Total (THD) tegangan output, waktu respons dinamis, faktor daya, dan efisiensi sistem. Setiap uji dilakukan tiga kali, dengan hasil dirata-rata untuk memastikan keandalan.
Seperti ditunjukkan dalam Tabel 1, skema yang diusulkan menunjukkan keunggulan signifikan dibandingkan skema konvensional di sebagian besar metrik: THD tegangan output berkurang dari 8,63% menjadi 5,33%, peningkatan 38,2%; waktu respons dinamis berkurang dari 428 μs menjadi 245 μs, penurunan 42,5%; dan faktor daya meningkat dari 0,91 menjadi 0,98. Meskipun efisiensi sistem hanya meningkat 0,1%, peningkatan marginal ini masih bermakna mengingat efisiensi dasar yang sudah tinggi melebihi 92%.

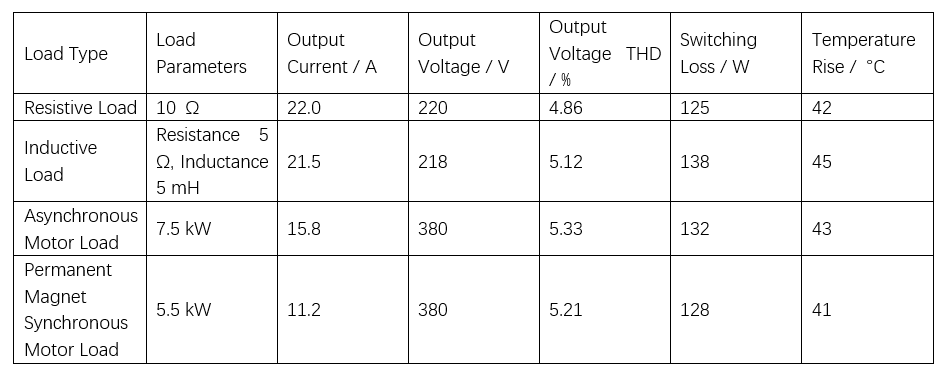
Kelayakan skema yang diusulkan di bawah kondisi beban yang berbeda diuji lebih lanjut, dengan hasil ditampilkan dalam Tabel 2. Uji coba mencakup beban resistif, induktif, dan motor. Hasil menunjukkan bahwa skema yang diusulkan mempertahankan kinerja stabil di semua jenis beban: variasi THD tegangan output hanya 0,47%, menunjukkan ketangguhan algoritma kontrol yang luar biasa; rugi perubahan status dipertahankan antara 125 W dan 138 W, dengan fluktuasi hanya 10,4%, menunjukkan manajemen daya yang efektif; dan kenaikan suhu dipertahankan dalam rentang 41-45 °C, mengkonfirmasi stabilitas termal yang superior.
4 Kesimpulan
Teknologi PWM frekuensi tinggi adalah enabler kunci untuk meningkatkan kinerja inverter, namun implementasinya dalam sistem kendali elektrik menghadapi banyak tantangan teknis. Makalah ini membahas isu-isu kritis seperti rugi perubahan status frekuensi tinggi, efek waktu mati, dan desain rangkaian driver dengan mengusulkan solusi sistematis dan menyajikan kerangka implementasi berbasis FPGA.
Skema yang diusulkan menawarkan presisi tinggi, latency rendah, dan kinerja real-time yang kuat, secara efektif meningkatkan respons dinamis dan akurasi keadaan tunak. Penelitian ini memberikan dukungan teknis yang solid untuk kendali inverter berkinerja tinggi dan memiliki potensi aplikasi luas di bidang otomasi industri, pembangkitan energi terbarukan, dan kendaraan listrik.










