
Kun kunnon tarkkuuden tarve teollisissa prosesseissa jatkaa kasvua, perinteinen pulssi-levyimodulaatio (PWM) -tekniikka onko kykenee vastaamaan vaatimuksiin korkeasta dynaamisesta suorituskyvystä ja alhaisesta harmonisista vääristymistä. Sen sijaan korkean taajuuden PWM-teknologia parantaa ulostulovaiheen laadun ja vähentää järjestelmän harmonisista lisäämällä kantoaaltotaajuutta, mikä optimoi inversioiden suorituskykyä. Tämän vuoksi korkean taajuuden PWM-teknologian soveltaminen järjestelmän tehon ja luotettavuuden tasapainottamiseksi on tullut olemaan keskeinen osa inversio-tekniikan kehitystä.
1. Korkean taajuuden PWM:n perusteet ja tekniset ominaisuudet
PWM-teknologia on ydinmenetelmä, jota käytetään inversioiden sähköhallintajärjestelmissä jännitteen ja taajuuden säätämiseen. Se luo pulssisarjat vertaamalla viitereitteitä kantoaaltoreiteihin ja käyttää näitä pulssisarjoja valvoakseen tehosekoituslaitteiden kytkentätiloja, saavuttaen täsmällisen hallinnan tehonsyöttölataan. Inversiohallinnassa PWM:n tödenvaihtosuhde D voidaan ilmaista viitereiton amplitudin Vref ja kantoaallon amplitudin Vtri suhteessa seuraavasti:

Modulaatiokerroin m määritellään viitereiton amplitudin suhteena kantoaallon amplitudin. Se vaikuttaa suoraan ulostulovoltin tehokkaaseen arvoon ja harmonisompiin ominaisuuksiin. Tämän suhteen ilmaisu on:

Kantoaaltotaajuus fc viittaa kolmiulotteiseen aaltoon, jota käytetään PWM-signaalin tuottamiseen. Arvonsa vaikuttaa suoraan järjestelmän dynaamiseen vastauksen nopeuteen ja ulostuloharmonisten jakautumiseen. Taajuussuhde N määritellään kantoaaltotaajuuden suhteena viitereiton taajuuteen, ilmaistuna seuraavasti:

missä on viitereiton taajuus. Korkean taajuuden PWM-teknologia viittaa yleensä PWM-hallintamenetelmiin, joiden kantoaaltotaajuus ylittää 10 kHz. Nykyisissä inversioissa, jatkuvien parannusten myötä tehosekoituslaitteiden suorituskykyyn, kantoaaltotaajuudet ovat saavuttaneet 20 kHz tai jopa suuremmat. Kantoaaltotaajuuden lisäämiseksi ulostuloharmoniset komponentit siirtyvät korkeampiin taajuusalueisiin, helpottaen jälkimmäistä suodattamista ja tehokkaasti vähentäen moottorin melua ja värinää.
Kokeet osoittavat, että kantoaaltotaajuuden lisääminen 5 kHz:sta 20 kHz:iin voi vähentää moottorin melua 12–15 dB ja alentaa lämpötilan nousua 5–8 °C. Kun kantoaaltotaajuus kasvaa, PWM-ulostulovaihe muistuttaa entistä enemmän ideaalista siniaalloa, ja kokonaisharmoninen vääristyminen (THD) vähenee merkittävästi. 20 kHz:n kantoaaltotaajuudella inversioiden ulostulovoltin THD putoaa noin 5 %:iin, mikä on huomattavasti parempi kuin alhaisen taajuuden PWM-menetelmien tyypilliset 8 %–12 %. Lisäksi korkean taajuuden PWM tarjoaa etuja kuten nopeampi dynaaminen vastaus ja korkeampi hallintatarkkuus.
2. Avaintehokkuudet korkean taajuuden PWM:n toteuttamisessa ja niiden ratkaisut
2.1 Korkeat vaihdolaskennat ja niiden lievittämiset
Korkean taajuuden PWM-teknologian tärkein ongelma on vaihdolaskennoiden terävä kasvu. Koska tehosekoituslaitteiden vaihdolaskennat ovat verrannollisia vaihdotaajuuteen, korkean taajuuden toiminta johtaa järjestelmän tehokkuuden heikkenemiseen ja lämmönjohtamisen vaatimusten kasvuun. Yhden eristettyjen portaiden bipolaaritransistorin (IGBT) moduulin vaihdolaskenta Psw voidaan mallintaa seuraavasti:

missä ja ovat päälle- ja pois-kirjaimet energialaskennat; Err on käänteinen palautusenergia; Vdc on todellinen DC-bussijännite; on viitereitti; on todellinen virta; ja Iref on viitevirta.
Vaihdolaskennoiden lievittämiseksi voidaan ottaa käyttöön seuraavia toimenpiteitä:
Ensiksi, käytä edistyneitä tehosekoituslaitteita, kuten hiilikide metallioxidipohjaisia kenttävaikutuskykyisiä transistorit (SiC MOSFET), jotka tarjoavat parempia vaihtomerkityksiä verrattuna perinteisiin IGBT:hin;
Toiseksi, optimoi portaiden ajuripiiri suunnittelua käyttämällä kaksoiskulmakalteisia ajuritekniikoita dynaamisesti säätämään portaiden vastusta vaihtotapahtumatilanteissa, tasapainottaen vaihtonopeutta ja sähkömagneettista häiriötä (EMI);
Lopuksi, käytä pehmeitä vaihtomenetelmiä, kuten nollajännite-vaihto (ZVS) tai nollavirta-vaihto (ZCS) topologioita, merkittävästi vähentääksesi vaihdolaskennat.
2.2 Kuolematilavaikutus ja korjaustekniikat
Korkean taajuuden PWM-toiminnossa, vaikka itse kuolematila pysyy vakiona, sen suhde vaihtojaksoon kasvaa, mikä tekee kuolematilavaikutuksesta havaitsemamman. Tämä voi johtaa ulostulovoltin vääristymiseen, heikentyneeseen hitaan nopeuden suorituskykyyn ja kasvaviin kiertymän rippeisiin. Näiden ongelmien tehokkaaksi lievittämiseksi käytetään kuolematilan korjausalgoritmeja, jotka ilmaistaan seuraavasti:

3 FPGA-pohjainen toteutussuunnitelma korkean taajuuden PWM-teknologialle
3.1 Järjestelmän rakenne
Korkean taajuuden PWM-hallinta asettaa korkeammat vaatimukset laskennallisten alustojen reaaliaikaan suorituskykyyn ja hallintatarkkuuteen. Perinteiset digitaaliset signaalinkäsittelyt (DSP:t) usein kohtaavat rajoitteita, kuten riittämätöntä laskentatehoa ja huomattavaa keskeytysviivettä korkean taajuuden PWM:n toteuttamisessa. Sen sijaan, kenttäohjattavat ohjelmointikentät (FPGA:t) soveltuvat paremmin tällaisiin sovelluksiin niiden rinnakkaislaskennan kyvyn ja laitteistotasolla toteutettavan joustavuuden vuoksi.
FPGA-pohjaisen korkean taajuuden PWM-hallintajärjestelmän yleinen rakenne koostuu neljästä ytimekkäästä moduulista: pääkonttoriyksikkö, PWM-luontiyksikkö, palautesignaalien käsittelyyksikkö ja suojausyksikkö. Erityisesti:
Pääkonttoriyksikkö: Suorittaa suljetun silmukan hallintatalikat, kuten nopeus-, virta- ja paikkasilmukat;
PWM-luontiyksikkö: Vastaa korkean tarkkuuden PWM-aaltojen luomisesta ja kuolematilan hallinnasta;
Palautesignaalien käsittelyyksikkö: Hoitaa virran, jännitteen ja paikan signaalien noutamisen ja esikäsittelyn;
Suojausyksikkö: Havaitsee ja reagoi epäonnistumisiin, kuten ylipitkään, ylijännitteisiin ja ylitietteisiin, varmistaakseen järjestelmän turvallisuuden.
Järjestelmä hyödyntää modulaarista suunnittelua, jossa toiminnalliset moduulit ovat yhteydessä standardoituilla rajapinnoilla. Sisäisesti FPGA käyttää kaksoiskelloalueen arkkitehtuuria: hallintatalikat toimivat alhaisemmassa kelloalueessa vähentääkseen resurssien kulutusta, kun taas PWM-luontimoduuli toimii korkean taajuuden kelloalueessa varmistaakseen tarkan ajoituksen ja korkean resoluution.
3.2 PWM-hallintatalikoiden optimointi ja toteutus
Korkean suorituskyvyn korkean taajuuden PWM-hallinnan saavuttamiseksi perinteinen tilavektori-pulsilevyimodulaatio (SVPWM) -algoritmi on optimoitu ottamalla käyttöön parannettu PWM-hallintatalikka, joka ilmaistaan seuraavasti:

missä Ta on vaihe A:n yläpuolen johtimajan johtoaika; vα ja vβ ovat viitereiton komponentit α-β-koordinaatistossa. Tämä algoritmi on toteutettu FPGA:ssa putkipitoisessa arkkitehtuurissa, muuntamalla monimutkaiset trigonometriset laskut yksinkertaisiksi lineaarisiksi operaatioiksi. Tämä vähentää merkittävästi laskenta-aikaa ja mahdollistaa yhden syklin suorituksen. Kuolematilan hallinnan optimoinnissa käytetään sopeutettavaa kuolematilan korjausta.
3.3 Järjestelmän suorituskyvyn testaus ja analyysi
Ehdotetun korkean taajuuden PWM-toteutussuunnitelman (tässä jatkossa "ehdotettu suunnitelma") etulyöntiaseman arvioimiseksi sitä verrataan perinteiseen DSP-pohjaiseen toteutukseen (tässä jatkossa "perinteinen suunnitelma"). Testiplattformi rakennetaan Xilinx Artix-7 FPGA:lla ja TMS320F28379D DSP:llä, käyttäen samanlaisia voimatasoja piirirakenteissa ja voimalaitteissa (1200 V/50 A SiC MOSFET). Suorituskykyindikaatoreina ovat ulostulovoltin kokonaisharmoninen vääristyminen (THD), dynaaminen vastausaika, tehokkaisuusaste ja järjestelmän tehokkuus. Jokainen testi toistetaan kolme kertaa, tuloksia keskiarvotaan varmistaakseen luotettavuuden.
Kuten näkyy taulukossa 1, ehdotettu suunnitelma osoittaa huomattavia etuja perinteiseen suunnitelmaan suurimmassa osassa mittareista: ulostulovoltin THD vähenee 8,63 %:sta 5,33 %:iin, 38,2 %:n parannus; dynaaminen vastausaika vähenee 428 μs:sta 245 μs:iin, 42,5 %:n väheneminen; ja tehokkaisuusaste kasvaa 0,91:stä 0,98. Vaikka järjestelmän tehokkuus paranee vain 0,1 %, tämä marginaalinen kasvu on edelleen merkityksellinen, koska jo korkea pohjasuhde ylittää 92 %.

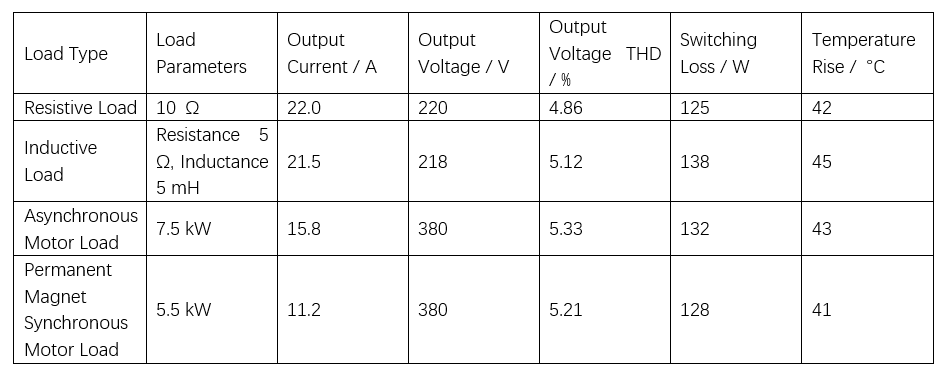
Ehdotetun suunnitelman soveltuvuus vaihtelevissa ladattavissa on testattu edelleen, tulokset esitetään taulukossa 2. Testit kattavat vastus-, induktiiviset ja moottoriladat. Tulokset osoittavat, että ehdotettu suunnitelma säilyttää vakaita suorituskykyä kaikissa ladatyypeissä: ulostulovoltin THD:n vaihtelu on vain 0,47 %, osoittaen erinomaista hallintatalikka-algoritmin robustisuutta; vaihdolaskennat pysyvät 125 W:n ja 138 W:n välillä, vaihtelu vain 10,4 %, osoittaen tehokasta voimanhallintaa; ja lämpötilan nousu pidetään 41–45 °C:n sisällä, vahvistaen erinomaista lämpövakautta.
4 Johtopä










