
A medida que la demanda de control preciso en los procesos industriales continúa aumentando, la tecnología tradicional de Modulación por Ancho de Pulso (PWM) lucha por cumplir con los requisitos de alto rendimiento dinámico y baja distorsión armónica. En contraste, la tecnología PWM de alta frecuencia mejora la calidad de la onda de salida y reduce las armónicas del sistema al aumentar la frecuencia del portador, optimizando así el rendimiento de los inversores. Por lo tanto, equilibrar la eficiencia y la confiabilidad del sistema al aplicar la tecnología PWM de alta frecuencia se ha convertido en un aspecto crítico del desarrollo de la tecnología de inversores.
1. Teoría Básica y Características Técnicas de la PWM de Alta Frecuencia
La tecnología PWM es la técnica central utilizada en los sistemas de control eléctrico de los inversores para regular el voltaje y la frecuencia. Genera secuencias de pulsos comparando señales de referencia con señales de portador y utiliza estas secuencias de pulsos para controlar los estados de conmutación de los dispositivos de potencia, logrando así un control preciso del suministro de energía a la carga. En el control de inversores, el ciclo de trabajo D de la PWM puede expresarse en relación con la amplitud de la onda de referencia Vref y la amplitud de la onda de portador Vtri de la siguiente manera:

La relación de modulación m se define como la relación entre la amplitud de la onda de referencia y la amplitud de la onda de portador. Influye directamente en el valor efectivo y las características armónicas del voltaje de salida. La expresión para esta relación es:

La frecuencia del portador fc se refiere a la frecuencia de la onda triangular utilizada para generar la señal PWM. Su valor afecta directamente la velocidad de respuesta dinámica del sistema y la distribución de las armónicas de salida. La relación de frecuencia N se define como la relación entre la frecuencia del portador y la frecuencia de la onda de referencia, expresada como:

donde es la frecuencia de la onda de referencia. La tecnología PWM de alta frecuencia generalmente se refiere a técnicas de control PWM con una frecuencia de portador superior a 10 kHz. En los inversores modernos, con mejoras continuas en el rendimiento de los dispositivos de potencia, las frecuencias de portador han alcanzado 20 kHz o incluso más. Al aumentar la frecuencia del portador, los componentes armónicos de salida se desplazan a rangos de frecuencia más altos, facilitando la filtración posterior y reduciendo efectivamente el ruido y la vibración del motor.
Los experimentos muestran que aumentar la frecuencia del portador de 5 kHz a 20 kHz puede reducir el ruido del motor en 12-15 dB y disminuir el aumento de temperatura en 5-8 °C. A medida que la frecuencia del portador aumenta, la onda de salida PWM se aproxima más a una onda senoidal ideal, y la Distorsión Armónica Total (THD) se reduce significativamente. Con una frecuencia de portador de 20 kHz, la THD del voltaje de salida del inversor disminuye a aproximadamente 5%, lo cual es considerablemente mejor que el 8%-12% típico de las técnicas PWM de baja frecuencia. Además, la PWM de alta frecuencia ofrece ventajas como una respuesta dinámica más rápida y mayor precisión de control.
2. Desafíos Clave en la Implementación de la PWM de Alta Frecuencia y Sus Soluciones
2.1 Pérdidas de Conmutación Altas y Métodos de Mitigación
El problema más prominente con la tecnología PWM de alta frecuencia es el aumento agudo de las pérdidas de conmutación. Dado que las pérdidas de conmutación de los dispositivos de potencia son proporcionales a la frecuencia de conmutación, la operación de alta frecuencia lleva a una reducción de la eficiencia del sistema y a mayores demandas en la gestión térmica. La pérdida de conmutación Psw de un módulo de Transistor Bipolar de Puerta Aislada (IGBT) individual se puede modelar de la siguiente manera:

donde y son las pérdidas de energía de encendido y apagado, respectivamente; Err es la energía de recuperación inversa; Vdc es el voltaje real de la línea DC; es el voltaje de referencia; es la corriente real; y Iref es la corriente de referencia.
Para suprimir las pérdidas de conmutación, se pueden adoptar las siguientes medidas:
Primero, utilizar dispositivos de potencia avanzados como Transistores de Efecto de Campo de Carburo de Silicio (SiC MOSFET), que ofrecen características de conmutación superiores a los IGBT convencionales;
Segundo, optimizar el diseño del circuito del conductor de puerta utilizando técnicas de conducción de doble pendiente para ajustar dinámicamente la resistencia de la puerta durante las transiciones de conmutación, equilibrando así la velocidad de conmutación y la interferencia electromagnética (EMI);
Finalmente, implementar técnicas de conmutación suave, como topologías de conmutación a tensión cero (ZVS) o a corriente cero (ZCS), para reducir significativamente las pérdidas de conmutación.
2.2 Efecto de Tiempo Muerto y Técnicas de Compensación
Bajo la operación de PWM de alta frecuencia, aunque el tiempo muerto absoluto permanece constante, su proporción en relación con el período de conmutación aumenta, haciendo que el efecto de tiempo muerto sea más pronunciado. Esto puede llevar a la distorsión del voltaje de salida, al deterioro del rendimiento a bajas velocidades y al aumento del ripple de par. Para mitigar efectivamente estos problemas, se emplean algoritmos de compensación de tiempo muerto, expresados como:

3 Esquema de Implementación Basado en FPGA para la Tecnología PWM de Alta Frecuencia
3.1 Diseño de Arquitectura del Sistema
El control PWM de alta frecuencia impone mayores exigencias en el rendimiento en tiempo real y la precisión de control de las plataformas de cómputo. Los Procesadores Digitales de Señal (DSP) tradicionales a menudo enfrentan limitaciones como potencia de cálculo insuficiente y latencia de interrupción significativa al implementar PWM de alta frecuencia. En contraste, las Matrices de Puertas Programables en Campo (FPGA) son más adecuadas para tales aplicaciones debido a sus capacidades de procesamiento en paralelo y flexibilidad de implementación a nivel de hardware.
La arquitectura general del sistema de control PWM de alta frecuencia basado en FPGA consta de cuatro módulos principales: la unidad de control principal, la unidad de generación de PWM, la unidad de procesamiento de señales de retroalimentación y la unidad de protección. Específicamente:
Unidad de Control Principal: Ejecuta algoritmos de control en bucle cerrado como los bucles de velocidad, corriente y posición;
Unidad de Generación de PWM: Responsable de generar ondas PWM de alta precisión y gestionar el control de tiempo muerto;
Unidad de Procesamiento de Señales de Retroalimentación: Maneja la adquisición y preprocesamiento de señales como corriente, voltaje y posición;
Unidad de Protección: Detecta y responde a fallos como sobrecorriente, sobretensión y sobrecalentamiento para garantizar la seguridad del sistema.
El sistema adopta un diseño modular, con módulos funcionales interconectados a través de interfaces estandarizadas. Internamente, la FPGA emplea una arquitectura de dominios de reloj dual: los algoritmos de control operan en un dominio de reloj de baja frecuencia para reducir el consumo de recursos, mientras que el módulo de generación de PWM funciona en un dominio de reloj de alta frecuencia para asegurar un temporizado preciso y una alta resolución.
3.2 Optimización e Implementación del Algoritmo de Control PWM
Para lograr un control PWM de alta frecuencia de alto rendimiento, se optimiza el algoritmo de Modulación por Ancho de Pulso de Vector Espacial (SVPWM) convencional mediante la introducción de un algoritmo de control PWM mejorado, expresado como:

donde Ta es el tiempo de conducción de la pierna superior de la Fase A; vα y vβ son los componentes de la tensión de referencia en el sistema de coordenadas α-β. Este algoritmo se implementa en la FPGA utilizando una arquitectura en tubería, transformando cálculos trigonométricos complejos en operaciones lineales simples. Esto reduce significativamente la latencia de cálculo y permite la ejecución en un solo ciclo. Para optimizar el control de tiempo muerto, se adopta una estrategia de compensación de tiempo muerto adaptable.
3.3 Pruebas y Análisis del Rendimiento del Sistema
Para evaluar la superioridad del esquema propuesto de implementación de PWM de alta frecuencia (en adelante, "esquema propuesto"), se compara con una implementación basada en DSP convencional (en adelante, "esquema convencional"). La plataforma de prueba se construye sobre una FPGA Xilinx Artix-7 y un DSP TMS320F28379D, utilizando topologías de circuito de igual nivel de potencia y módulos de potencia (MOSFET de SiC de 1200 V/50 A). Las métricas de rendimiento incluyen la Distorsión Armónica Total (THD) del voltaje de salida, el tiempo de respuesta dinámica, el factor de potencia y la eficiencia del sistema. Cada prueba se repite tres veces, promediándose los resultados para garantizar la confiabilidad.
Como se muestra en la Tabla 1, el esquema propuesto demuestra ventajas significativas sobre el esquema convencional en la mayoría de las métricas: la THD del voltaje de salida se reduce de 8.63% a 5.33%, una mejora del 38.2%; el tiempo de respuesta dinámica disminuye de 428 μs a 245 μs, una reducción del 42.5%; y el factor de potencia aumenta de 0.91 a 0.98. Aunque la eficiencia del sistema mejora solo en 0.1%, este margen de ganancia sigue siendo significativo dado que la eficiencia de base ya supera el 92%.

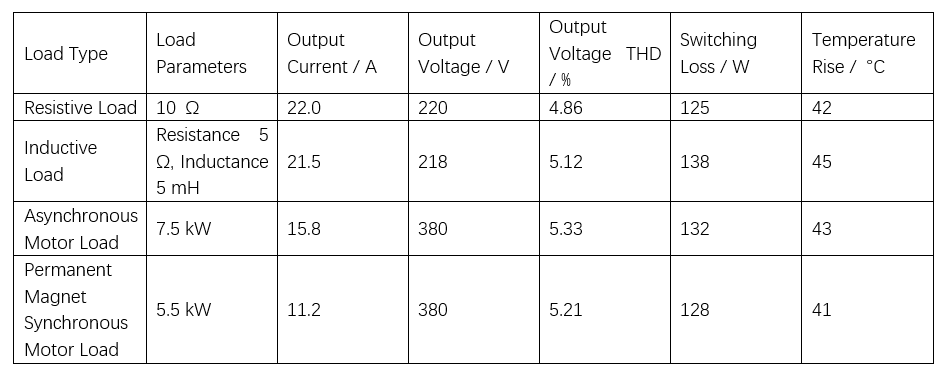
Se prueba la factibilidad del esquema propuesto bajo diversas condiciones de carga, con resultados presentados en la Tabla 2. Las pruebas abarcan cargas resistivas, inductivas y de motor. Los resultados muestran que el esquema propuesto mantiene un rendimiento estable en todos los tipos de carga: la variación en la THD del voltaje de salida es solo de 0.47%, demostrando una excelente robustez del algoritmo de control; las pérdidas de conmutación se mantienen entre 125 W y 138 W, con una fluctuación de solo 10.4%, indicando una gestión de potencia efectiva; y el aumento de temperatura se mantiene dentro de 41-45 °C, confirmando una estabilidad térmica superior.
4 Conclusión
La tecnología PWM de alta frecuencia es un elemento clave para mejorar el rendimiento de los inversores, pero su implementación en sistemas de control eléctrico enfrenta múltiples desafíos técnicos. Este artículo aborda cuestiones críticas como las pérdidas de conmutación de alta frecuencia, los efectos de tiempo muerto y el diseño de circuitos de control, proponiendo soluciones sistemáticas y presentando un marco de implementación basado en FPGA.
El esquema propuesto ofrece alta precisión, baja latencia y fuerte rendimiento en tiempo real, mejorando eficazmente tanto la respuesta dinámica como la precisión en estado estable. La investigación proporciona un sólido soporte técnico para el control de inversores de alto rendimiento y tiene un amplio potencial de aplicación en campos como la automatización industrial, la generación de energía renovable y los vehículos eléctricos.










