
산업 공정에서 정밀한 제어에 대한 수요가 계속 증가함에 따라 전통적인 펄스 폭 변조(PWM) 기술은 고동적 성능과 저조파 왜곡을 충족시키는 데 어려움을 겪고 있습니다. 반면, 고주파 PWM 기술은 캐리어 주파수를 높여 출력 파형의 품질을 향상시키고 시스템의 조화파를 줄임으로써 인버터의 성능을 최적화합니다. 따라서 고주파 PWM 기술을 적용할 때 시스템 효율성과 신뢰성을 균형 잡는 것이 인버터 기술 개발의 중요한 측면이 되었습니다.
1. 고주파 PWM의 기본 이론 및 기술적 특성
PWM 기술은 인버터의 전기 제어 시스템에서 전압과 주파수를 조절하는 핵심 기술입니다. 이 기술은 참조 신호와 캐리어 신호를 비교하여 펄스 시퀀스를 생성하고 이러한 펄스 시퀀스를 사용하여 전력 장치의 스위칭 상태를 제어하여 부하에 대한 전력 공급을 정밀하게 제어합니다. 인버터 제어에서 PWM의 듀티 사이클 D은 참조 파형 진폭 Vref과 캐리어 파형 진폭 Vtri과 다음과 같이 표현될 수 있습니다:

조정비 m은 참조 파형 진폭과 캐리어 파형 진폭의 비로 정의됩니다. 이는 출력 전압의 효과값과 조화특성에 직접적인 영향을 미칩니다. 이 비율의 표현식은 다음과 같습니다:

캐리어 주파수 fc는 PWM 신호를 생성하기 위해 사용되는 삼각파의 주파수를 의미합니다. 그 값은 시스템의 동적 응답 속도와 출력 조화파의 분포에 직접적인 영향을 미칩니다. 주파수 비율 N은 캐리어 주파수와 참조 파형 주파수의 비로 정의되며, 다음과 같이 표현됩니다:

여기서 은 참조 파형 주파수입니다. 고주파 PWM 기술은 일반적으로 캐리어 주파수가 10 kHz를 초과하는 PWM 제어 기술을 의미합니다. 현대의 인버터에서는 전력 장치의 성능이 지속적으로 개선됨에 따라 캐리어 주파수가 20 kHz 이상으로 도달하였습니다. 캐리어 주파수를 증가시킴으로써 출력 조화 성분은 더 높은 주파수 범위로 이동하여 후속 필터링을 용이하게 하고 모터 노이즈와 진동을 효과적으로 줄입니다.
실험 결과, 캐리어 주파수를 5 kHz에서 20 kHz로 증가시킬 경우 모터 노이즈가 12~15 dB 감소하고 온도 상승이 5~8 °C 감소한다는 것을 보여줍니다. 캐리어 주파수가 증가함에 따라 PWM 출력 파형은 이상적인 사인파에 가까워지고 전체 조화 왜곡(THD)은 크게 감소합니다. 20 kHz의 캐리어 주파수에서 인버터 출력 전압의 THD는 약 5%로 감소하며, 이는 낮은 주파수 PWM 기법의 8%~12%보다 훨씬 우수합니다. 또한, 고주파 PWM은 빠른 동적 응답과 높은 제어 정확도 등의 장점을 제공합니다.
2. 고주파 PWM 구현의 주요 과제와 해결 방법
2.1 높은 스위칭 손실과 완화 방법
고주파 PWM 기술의 가장 두드러진 문제점은 스위칭 손실의 급격한 증가입니다. 전력 장치의 스위칭 손실은 스위칭 주파수에 비례하기 때문에, 고주파 작동은 시스템 효율을 감소시키고 열 관리에 대한 요구를 증가시킵니다. 단일 IGBT 모듈의 스위칭 손실 Psw은 다음과 같이 모델링할 수 있습니다:

여기서 과 는 각각 켤 때와 끌 때의 에너지 손실입니다; Err는 역방향 회복 에너지입니다; Vdc는 실제 DC 버스 전압입니다; 는 참조 전압입니다; 는 실제 전류입니다; 그리고 Iref는 참조 전류입니다.
스위칭 손실을 억제하기 위해 다음의 조치를 취할 수 있습니다:
첫째, 실리콘 카바이드 메탈옥사이드반도체 필드효과 트랜지스터(SiC MOSFET)와 같은 고급 전력 장치를 사용하여 전통적인 IGBT보다 우수한 스위칭 특성을 얻습니다;
둘째, 게이트 드라이버 회로 설계를 최적화하여 듀얼 슬로프 드라이브 기법을 사용하여 스위칭 전환 중 게이트 저항을 동적으로 조정하여 스위칭 속도와 전자기 간섭(EMI)을 균형 잡습니다;
마지막으로, 제로 볼트 스위칭(ZVS) 또는 제로 커런트 스위칭(ZCS) 위상 등 소프트 스위칭 기법을 구현하여 스위칭 손실을 크게 줄입니다.
2.2 데드타임 효과와 보상 기법
고주파 PWM 작동 하에서는 절대 데드타임이 일정하지만, 스위칭 주기 대비 데드타임의 비율이 증가하여 데드타임 효과가 더욱 두드러집니다. 이로 인해 출력 전압 왜곡, 저속 성능 저하, 토크 리플 증가 등의 문제가 발생할 수 있습니다. 이러한 문제를 효과적으로 완화하기 위해 데드타임 보상 알고리즘이 사용되며, 이를 다음과 같이 표현할 수 있습니다:

3 FPGA 기반 고주파 PWM 기술 구현 방안
3.1 시스템 아키텍처 설계
고주파 PWM 제어는 컴퓨팅 플랫폼의 실시간 성능과 제어 정밀도에 더 높은 요구사항을 제기합니다. 전통적인 디지털 신호 처리기(DSP)는 고주파 PWM을 구현할 때 계산 능력 부족과 중단 지연 시간이 큰 한계를 가지고 있습니다. 반면, FPGA는 병렬 처리 능력과 하드웨어 수준의 구현 유연성 덕분에 이러한 응용 프로그램에 더 적합합니다.
FPGA 기반 고주파 PWM 제어 시스템의 전체 아키텍처는 네 가지 핵심 모듈로 구성됩니다: 주 제어 유닛, PWM 생성 유닛, 피드백 신호 처리 유닛, 그리고 보호 유닛. 구체적으로:
주 제어 유닛: 속도, 전류, 위치 루프와 같은 폐루프 제어 알고리즘을 실행합니다;
PWM 생성 유닛: 고정밀 PWM 파형을 생성하고 데드타임 제어를 담당합니다;
피드백 신호 처리 유닛: 전류, 전압, 위치와 같은 신호의 획득 및 전처리를 담당합니다;
보호 유닛: 과전류, 과전압, 과열 등의 고장 감지 및 대응을 수행하여 시스템 안전을 보장합니다.
시스템은 표준화된 인터페이스를 통해 기능 모듈들이 연결된 모듈식 설계를 채택합니다. 내부적으로 FPGA는 듀얼 클럭 도메인 아키텍처를 사용합니다: 제어 알고리즘은 자원 소비를 줄이기 위해 낮은 주파수 클럭 도메인에서 작동하며, PWM 생성 모듈은 정밀한 타이밍과 높은 해상도를 보장하기 위해 높은 주파수 클럭 도메인에서 작동합니다.
3.2 PWM 제어 알고리즘의 최적화 및 구현
고성능 고주파 PWM 제어를 달성하기 위해 전통적인 공간 벡터 펄스 폭 변조(SVPWM) 알고리즘을 개선된 PWM 제어 알고리즘으로 최적화합니다. 이를 다음과 같이 표현할 수 있습니다:

여기서 Ta는 A상의 상단 다리의 전도 시간입니다; vα와 vβ는 α-β 좌표계에서의 참조 전압의 구성 요소입니다. 이 알고리즘은 FPGA에서 파이프라인 아키텍처를 사용하여 복잡한 삼각 함수 계산을 간단한 선형 연산으로 변환하여 계산 지연을 크게 줄이고 단일 주기 실행을 가능하게 합니다. 데드타임 제어를 최적화하기 위해 적응형 데드타임 보상 전략을 채택합니다.
3.3 시스템 성능 테스트 및 분석
제안된 고주파 PWM 구현 방안(이하 "제안된 방안")의 우수성을 평가하기 위해, 이는 전통적인 DSP 기반 구현(이하 "전통적인 방안")과 비교됩니다. 테스트 플랫폼은 Xilinx Artix-7 FPGA와 TMS320F28379D DSP를 기반으로 동일한 전력 수준 회로 구조와 전력 모듈(1200 V/50 A SiC MOSFET)을 사용합니다. 성능 지표는 출력 전압의 총 조화 왜곡(THD), 동적 응답 시간, 전력 인자, 시스템 효율입니다. 각 테스트는 세 번 반복되어 결과를 평균화하여 신뢰성을 확보합니다.
표 1에 표시된 바와 같이, 제안된 방안은 대부분의 지표에서 전통적인 방안에 비해 유의미한 장점을 보여줍니다: 출력 전압 THD는 8.63%에서 5.33%로 38.2% 개선되었습니다; 동적 응답 시간은 428 μs에서 245 μs로 42.5% 감소했습니다; 전력 인자는 0.91에서 0.98로 증가했습니다. 시스템 효율은 0.1% 만큼 개선되었지만, 이미 92%를 초과하는 높은 기준 효율을 고려하면 여전히 의미 있는 개선입니다.

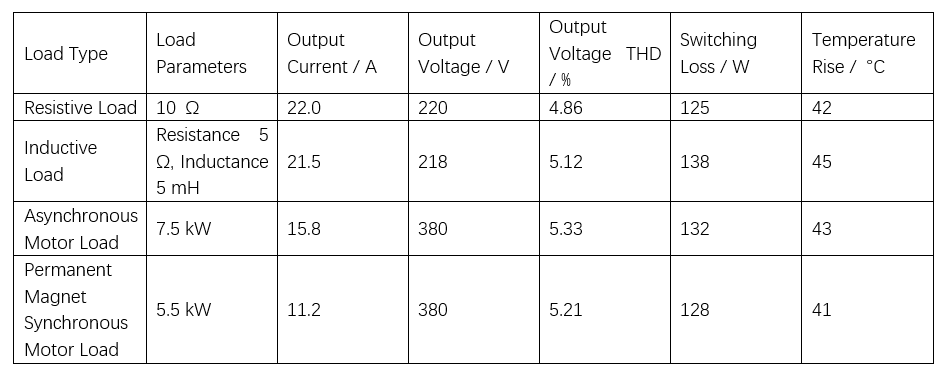
제안된 방안의 다양한 부하 조건에서의 타당성은 추가로 테스트되었으며, 결과는 표 2에 제시되어 있습니다. 테스트는 저항성, 유도성, 모터 부하를 포함합니다. 결과는 제안된 방안이 모든 부하 유형에서 안정적인 성능을 유지함을 보여줍니다: 출력 전압 THD의 변동은 0.47%로 매우 작아, 제어 알고리즘의 뛰어난 강건성을 입증합니다; 스위칭 손실은 125 W에서 138 W 사이로 유지되며, 변동은 10.4%로 효과적인 전력 관리를 나타냅니다; 온도 상승은 41~45 °C로 유지되어 우수한 열 안정성을 확인합니다.
4 결론
고주파 PWM 기술은 인버터 성능을 향상시키는 핵심 기술이나, 전기 제어 시스템에서의 구현은 여러 기술적 과제를 마주하고 있습니다. 본 논문은 고주파 스위칭 손실, 데드타임 효과, 드라이버 회로 설계와 같은 주요 문제들을 해결하기 위한 체계적인 해결책을 제안하고, FPGA 기반 구현 프레임워크를 제시합니다.
제안된 방안은 높은 정밀도, 낮은 지연 시간, 강력한 실시간 성능을 제공하여 동적 응답과 정상 상태 정확도를 효과적으로 향상시킵니다. 본 연구는 고성능 인버터 제어에 대한 견고한 기술적 지원을 제공하며, 산업 자동화, 재생 에너지 발전, 전기 차량 등 다양한 분야에서 광범위한 적용 가능성을 갖습니다.










