Khi nhu cầu về kiểm soát chính xác trong các quy trình công nghiệp tiếp tục tăng, công nghệ điều chế rộng xung (PWM) truyền thống gặp khó khăn trong việc đáp ứng yêu cầu về hiệu suất động cao và giảm méo hài. Ngược lại, công nghệ PWM tần số cao cải thiện chất lượng sóng ra và giảm谐波部分似乎被截断了,我将从头开始完整翻译这段内容至越南语。以下是完整的翻译:
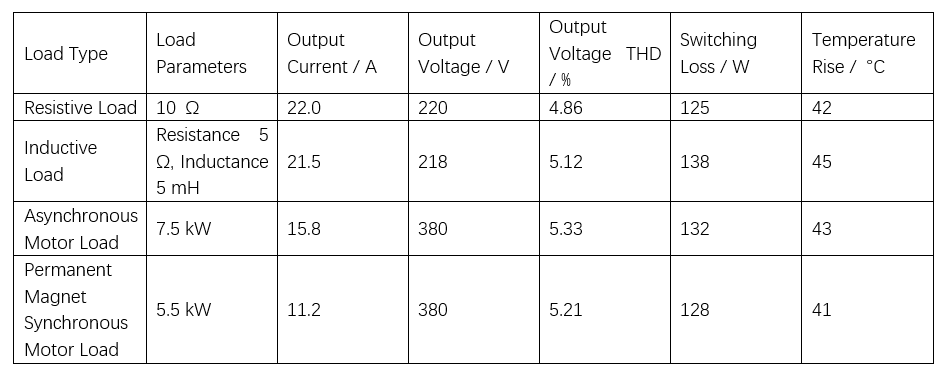
Khi nhu cầu về kiểm soát chính xác trong các quy trình công nghiệp tiếp tục tăng, công nghệ điều chế rộng xung (PWM) truyền thống gặp khó khăn trong việc đáp ứng yêu cầu về hiệu suất động cao và giảm méo hài. Ngược lại, công nghệ PWM tần số cao cải thiện chất lượng sóng ra và giảm harmonics hệ thống bằng cách tăng tần số mang, do đó tối ưu hóa hiệu suất của bộ biến tần. Do đó, cân bằng giữa hiệu suất và độ tin cậy của hệ thống khi áp dụng công nghệ PWM tần số cao đã trở thành một khía cạnh quan trọng trong sự phát triển của công nghệ biến tần. 1. Lý thuyết cơ bản và đặc điểm kỹ thuật của PWM tần số cao Công nghệ PWM là kỹ thuật cốt lõi được sử dụng trong hệ thống điều khiển điện tử của bộ biến tần để điều chỉnh điện áp và tần số. Nó tạo ra chuỗi xung bằng cách so sánh tín hiệu tham chiếu với tín hiệu mang và sử dụng chuỗi xung này để điều khiển trạng thái chuyển mạch của thiết bị điện, từ đó đạt được kiểm soát chính xác nguồn điện cung cấp cho tải. Trong điều khiển biến tần, tỷ lệ hoạt động D của PWM có thể được biểu diễn theo biên độ tín hiệu tham chiếu Vref và biên độ tín hiệu mang Vtri như sau: Tỷ lệ điều chế m được định nghĩa là tỷ lệ giữa biên độ tín hiệu tham chiếu và biên độ tín hiệu mang. Nó直接影响输出电压的有效值和谐波特性。该比率的表达式为: Tần số mang fc đề cập đến tần số của sóng tam giác được sử dụng để tạo tín hiệu PWM. Giá trị của nó ảnh hưởng trực tiếp đến tốc độ phản hồi động của hệ thống và phân bố của harmonics đầu ra. Tỷ lệ tần số N được định nghĩa là tỷ lệ giữa tần số mang và tần số tín hiệu tham chiếu, được biểu diễn như sau: trong đó là tần số tín hiệu tham chiếu. Công nghệ PWM tần số cao thường đề cập đến các kỹ thuật điều khiển PWM với tần số mang vượt quá 10 kHz. Trong các bộ biến tần hiện đại, với sự cải tiến liên tục về hiệu suất của thiết bị điện, tần số mang đã đạt đến 20 kHz hoặc thậm chí cao hơn. Bằng cách tăng tần số mang, các thành phần harmonics đầu ra được dịch chuyển sang dải tần số cao hơn, giúp thuận tiện cho việc lọc sau đó và giảm đáng kể tiếng ồn và rung động của động cơ. Các thí nghiệm cho thấy việc tăng tần số mang từ 5 kHz lên 20 kHz có thể giảm tiếng ồn của động cơ từ 12-15 dB và giảm nhiệt độ tăng từ 5-8 °C. Khi tần số mang tăng, dạng sóng đầu ra của PWM gần giống với sóng sin lý tưởng hơn, và Tổng Harmonic Distortion (THD) giảm đáng kể. Tại tần số mang 20 kHz, THD của điện áp đầu ra của bộ biến tần giảm xuống khoảng 5%, tốt hơn nhiều so với 8%-12% thường thấy trong các kỹ thuật PWM tần số thấp. Ngoài ra, PWM tần số cao còn mang lại lợi ích như phản hồi động nhanh hơn và độ chính xác kiểm soát cao hơn. 2. Thách thức chính trong việc thực hiện PWM tần số cao và các giải pháp 2.1 Mất mát chuyển mạch cao và phương pháp giảm thiểu Vấn đề nổi bật nhất của công nghệ PWM tần số cao là sự gia tăng đột ngột của mất mát chuyển mạch. Vì mất mát chuyển mạch của thiết bị điện tỷ lệ thuận với tần số chuyển mạch, việc hoạt động ở tần số cao dẫn đến hiệu suất hệ thống giảm và đòi hỏi quản lý nhiệt lớn hơn. Mất mát chuyển mạch Psw của một mô-đun Transistor Bipolar Cổng Cách Ly (IGBT) có thể được mô hình hóa như sau: trong đó và là năng lượng mất mát khi mở và đóng, tương ứng; Err là năng lượng phục hồi ngược; Vdc là điện áp DC bus thực tế; là điện áp tham chiếu; là dòng điện thực tế; và Iref là dòng điện tham chiếu. Để kiềm chế mất mát chuyển mạch, có thể áp dụng các biện pháp sau: 2.2 Hiệu ứng thời gian chết và kỹ thuật bù đắp Trong hoạt động PWM tần số cao, mặc dù thời gian chết tuyệt đối vẫn giữ nguyên, nhưng tỷ lệ của nó so với chu kỳ chuyển mạch tăng lên, làm cho hiệu ứng thời gian chết trở nên rõ rệt hơn. Điều này có thể dẫn đến méo dạng sóng điện áp đầu ra, hiệu suất thấp ở tốc độ thấp và tăng dao động lực. Để khắc phục hiệu quả các vấn đề này, các thuật toán bù đắp thời gian chết được sử dụng, được biểu diễn như sau: 3 Phương án triển khai dựa trên FPGA cho công nghệ PWM tần số cao 3.1 Thiết kế kiến trúc hệ thống Kiểm soát PWM tần số cao đặt ra yêu cầu cao hơn về hiệu suất thực thi và độ chính xác kiểm soát của nền tảng tính toán. Các Bộ xử lý tín hiệu số (DSP) truyền thống thường gặp hạn chế như sức mạnh tính toán không đủ và độ trễ ngắt lớn khi triển khai PWM tần số cao. Ngược lại, Mảng cổng lập trình trường (FPGA) phù hợp hơn cho các ứng dụng này nhờ khả năng xử lý song song và linh hoạt triển khai ở mức phần cứng. Kiến trúc tổng thể của hệ thống kiểm soát PWM tần số cao dựa trên FPGA bao gồm bốn mô-đun cốt lõi: đơn vị điều khiển chính, đơn vị tạo PWM, đơn vị xử lý tín hiệu phản hồi và đơn vị bảo vệ. Cụ thể: Đơn vị điều khiển chính: Thực hiện các thuật toán kiểm soát vòng kín như vòng tốc độ, vòng dòng điện và vòng vị trí; Đơn vị tạo PWM: Chịu trách nhiệm tạo các dạng sóng PWM chính xác và quản lý điều khiển thời gian chết; Đơn vị xử lý tín hiệu phản hồi: Xử lý việc thu thập và tiền xử lý các tín hiệu như dòng điện, điện áp và vị trí; Đơn vị bảo vệ: Phát hiện và phản ứng với các lỗi như quá dòng, quá điện áp và quá nhiệt để đảm bảo an toàn hệ thống. Hệ thống áp dụng thiết kế mô-đun, với các mô-đun chức năng được kết nối thông qua các giao diện chuẩn. Bên trong, FPGA sử dụng kiến trúc hai miền đồng hồ: các thuật toán kiểm soát hoạt động trong miền đồng hồ tần số thấp để giảm tiêu thụ tài nguyên, trong khi mô-đun tạo PWM chạy trong miền đồng hồ tần số cao để đảm bảo thời gian chính xác và độ phân giải cao. 3.2 Tối ưu hóa và triển khai thuật toán kiểm soát PWM Để đạt được kiểm soát PWM tần số cao hiệu suất cao, thuật toán điều chế vectơ không gian (SVPWM) truyền thống được tối ưu hóa bằng cách giới thiệu thuật toán kiểm soát PWM cải tiến, được biểu diễn như sau: trong đó Ta là thời gian dẫn của chân A phía trên; vα và vβ là các thành phần của điện áp tham chiếu trong hệ tọa độ α-β. Thuật toán này được triển khai trong FPGA bằng cách sử dụng kiến trúc đường ống, biến đổi các phép tính lượng giác phức tạp thành các phép tính tuyến tính đơn giản. Điều này giảm đáng kể độ trễ tính toán và cho phép thực thi trong một chu kỳ. Để tối ưu hóa điều khiển thời gian chết, chiến lược bù đắp thời gian chết thích ứng được áp dụng. 3.3 Kiểm tra và phân tích hiệu suất hệ thống Để đánh giá ưu điểm của phương án triển khai PWM tần số cao được đề xuất (sau đây gọi là "phương án đề xuất"), nó được so sánh với phương án triển khai dựa trên DSP truyền thống (sau đây gọi là "phương án truyền thống"). Nền tảng kiểm tra được xây dựng trên FPGA Xilinx Artix-7 và DSP TMS320F28379D, sử dụng các sơ đồ mạch cấp công suất và mô-đun công suất (1200 V/50 A SiC MOSFET) giống nhau. Các chỉ số hiệu suất bao gồm Tổng Harmonic Distortion (THD) của điện áp đầu ra, thời gian phản hồi động, hệ số công suất và hiệu suất hệ thống. Mỗi bài kiểm tra được lặp lại ba lần, kết quả được trung bình để đảm bảo độ tin cậy. Như thể hiện trong Bảng 1, phương án đề xuất thể hiện những ưu điểm đáng kể so với phương án truyền thống ở hầu hết các chỉ số: THD của điện áp đầu ra giảm từ 8,63% xuống 5,33%, cải thiện 38,2%; thời gian phản hồi động giảm từ 428 μs xuống 245 μs, giảm 42,5%; và hệ số công suất tăng từ 0,91 lên 0,98. Mặc dù hiệu suất hệ thống chỉ cải thiện 0,1%, nhưng sự cải thiện nhỏ này vẫn có ý nghĩa khi hiệu suất cơ sở đã vượt quá 92%. Khả năng triển khai của phương án đề xuất dưới các điều kiện tải khác nhau được kiểm tra thêm, kết quả được trình bày trong Bảng 2. Các bài kiểm tra bao gồm tải kháng, tải cảm và tải động cơ. Kết quả cho thấy phương án đề xuất duy trì hiệu suất ổn định trên tất cả các loại tải: sự biến đổi của THD điện áp đầu ra chỉ là 0,47%, chứng tỏ độ ổn định xuất sắc của thuật toán kiểm soát; mất mát chuyển mạch được duy trì trong khoảng 125 W đến 138 W, với sự dao động chỉ 10,4%, cho thấy quản lý công suất hiệu quả; và nhiệt độ tăng được giữ trong khoảng 41-45 °C, xác nhận độ ổn định nhiệt tốt. 4 Kết luận Công nghệ PWM tần số cao là yếu tố then chốt để nâng cao hiệu suất của bộ biến tần, nhưng việc triển khai trong hệ thống điều khiển điện tử gặp nhiều thách thức kỹ thuật. Bài viết này đề cập đến các vấn đề quan trọng như mất mát chuyển mạch tần số cao, hiệu ứng thời gian chết và thiết kế mạch điều khiển cổng bằng cách đề xuất các giải pháp hệ thống và trình bày khung triển khai dựa trên FPGA. Phương án đề xuất cung cấp độ chính xác cao, độ trễ thấp và hiệu suất thực thi mạnh mẽ, cải thiện hiệu quả cả phản hồi động và độ chính xác trạng thái ổn định. Nghiên cứu này cung cấp hỗ trợ kỹ thuật vững chắc cho kiểm soát bộ biến tần hiệu suất cao và có tiềm năng ứng dụng rộng rãi trong các lĩnh vực như tự động hóa công nghiệp, sản xuất năng lượng tái tạo và xe điện.



Thứ nhất, sử dụng các thiết bị điện tiên tiến như Transistor Trường Hiệu ứng Kim loại-Oxy-Chất bán dẫn Carbua Silic (SiC MOSFET), có đặc tính chuyển mạch vượt trội so với IGBT thông thường;
Thứ hai, tối ưu hóa thiết kế mạch điều khiển cổng bằng cách sử dụng kỹ thuật điều khiển dual-slope để điều chỉnh động điện trở cổng trong quá trình chuyển mạch, từ đó cân bằng giữa tốc độ chuyển mạch và nhiễu điện từ (EMI);
Cuối cùng, triển khai các kỹ thuật chuyển mạch mềm, như cấu trúc chuyển mạch không điện áp (ZVS) hoặc chuyển mạch không dòng (ZCS), để giảm đáng kể mất mát chuyển mạch.