
Com la demanda de control precís en els processos industrials continua augmentant, la tecnologia tradicional de Modulació d'Amplada d'Impuls (PWM) es troba amb dificultats per satisfer les exigències de rendiment dinàmic elevat i baixa distorsió harmònica. En contrast, la tecnologia PWM de alta freqüència millores la qualitat de l'ona de sortida i redueix les harmoniques del sistema augmentant la freqüència del portador, optimitzant així el rendiment dels inversors. Per tant, equilibrar l'eficiència i la fiabilitat del sistema en l'aplicació de la tecnologia PWM de alta freqüència ha esdevingut un aspecte crític en el desenvolupament de la tecnologia d'inversors.
1. Teoria bàsica i característiques tècniques de la PWM de alta freqüència
La tecnologia PWM és la tècnica central utilitzada en els sistemes de control elèctric d'inversors per regular la tensió i la freqüència. Genera seqüències d'impulsos comparant senyals de referència amb senyals de portador i utilitza aquestes seqüències d'impulsos per controlar els estats de commutació dels dispositius de potència, així assolint un control precís de l'abastament d'energia a la càrrega. En el control d'inversors, el cicle de treball D de la PWM es pot expressar en relació a l'amplitud de l'ona de referència Vref i l'amplitud de l'ona de portador Vtri com segueix:

El rati de modulació m es defineix com la raó entre l'amplitud de l'ona de referència i l'amplitud de l'ona de portador. Això influeix directament en el valor efectiu i les característiques harmòniques de la tensió de sortida. L'expressió d'aquesta raó és:

La freqüència del portador fc fa referència a la freqüència de l'ona triangular utilitzada per generar el senyal PWM. El seu valor afecta directament la velocitat de resposta dinàmica del sistema i la distribució de les harmoniques de sortida. El rati de freqüència N es defineix com la raó entre la freqüència del portador i la freqüència de l'ona de referència, expressat com:

on és la freqüència de l'ona de referència. La tecnologia PWM de alta freqüència generalment es refereix a tècniques de control PWM amb una freqüència del portador que supera els 10 kHz. En els inversors moderns, amb millores contínues en el rendiment dels dispositius de potència, les freqüències del portador han arribat als 20 kHz o encara més altes. Augmentant la freqüència del portador, les components harmòniques de sortida es desplaçen a rangs de freqüències més altes, facilitant la filtració posterior i reduint eficientment el soroll i la vibració del motor.
Els experiments mostren que augmentar la freqüència del portador de 5 kHz a 20 kHz pot reduir el soroll del motor entre 12–15 dB i abaixar l'increment de temperatura entre 5–8 °C. Com la freqüència del portador augmenta, l'ona de sortida PWM s'assembla més a una ona sinusoidal ideal, i la Distorsió Harmònica Total (THD) es redueix significativament. A una freqüència del portador de 20 kHz, la THD de la tensió de sortida de l'inversor cau a aproximadament un 5%, el que és considerablement millor que els 8%–12% típics de les tècniques PWM de baixa freqüència. A més, la PWM de alta freqüència ofereix avantatges com una resposta dinàmica més ràpida i una major precisió de control.
2. Desafiaments clau en la implementació de la PWM de alta freqüència i les seves solucions
2.1 Pèrdues de commutació elevades i mètodes de mitigació
El problema més destacat de la tecnologia PWM de alta freqüència és l'augment brusc de les pèrdues de commutació. Ja que les pèrdues de commutació dels dispositius de potència són proporcionals a la freqüència de commutació, l'operació a alta freqüència porta a una reducció de l'eficiència del sistema i a una major demanda de gestió tèrmica. La pèrdua de commutació Psw d'un mòdul d'IGBT (Transistor Bipolar amb Porta Aïllada) individual es pot modelar com segueix:

on i són les pèrdues d'energia d'encendre i apagar, respectivament; Err és l'energia de recuperació inversa; Vdc és la tensió real del bus DC; és la tensió de referència; és la corrent real; i Iref és la corrent de referència.
Per suprimir les pèrdues de commutació, es poden adoptar les següents mesures:
Primer, utilitzar dispositius de potència avançats com els Transistors de Camp d'Efecte de Mosquetó amb Carbide de Silici (SiC MOSFETs), que ofereixen característiques de commutació superior a les IGBTs convencionals;
Segon, optimitzar el disseny del circuit de conducció de la porta mitjançant la utilització de tècniques de conducció de doble rampa per ajustar dinàmicament la resistència de la porta durant les transicions de commutació, així balançant la velocitat de commutació i la interferència electromagnètica (EMI);
Finalment, implementar tècniques de commutació suau, com les topologies de commutació a tensió zero (ZVS) o commutació a corrent zero (ZCS), per reduir significativament les pèrdues de commutació.
2.2 Efecte del temps mort i tècniques de compensació
Sota operació PWM de alta freqüència, encara que el temps mort absolut romang constant, la seva proporció respecte al període de commutació augmenta, fent que l'efecte del temps mort sigui més pronunciat. Això pot portar a la distorsió de la tensió de sortida, a una degradació del rendiment a baixa velocitat i a un increment de la fluctuació de la torsió. Per mitigar efectivament aquests problemes, es fan servir algoritmes de compensació del temps mort, expressats com:

3 Esquema d'implementació basat en FPGA per a la tecnologia PWM de alta freqüència
3.1 Disseny de l'arquitectura del sistema
El control PWM de alta freqüència imposa requisits més elevats sobre el rendiment en temps real i la precisió de control de les plataformes de càlcul. Les Processadores de Senyal Digital (DSP) tradicionals sovint es troben amb limitacions com una capacitat de càlcul insuficient i una latència d'interrupció significativa quan implementen PWM de alta freqüència. En canvi, les Matrices de Portes Programables en Camp (FPGA) són més adequades per a aquestes aplicacions gràcies a les seves capacitats de processament paral·lel i flexibilitat d'implementació a nivell de maquinari.
L'arquitectura global del sistema de control PWM de alta freqüència basat en FPGA consta de quatre mòduls principals: la unitat de control principal, la unitat de generació de PWM, la unitat de processament de senyals de retroalimentació i la unitat de protecció. Específicament:
Unitat de Control Principal: Executa algoritmes de control en bucle tancat com els bucles de velocitat, corrent i posició;
Unitat de Generació de PWM: És responsable de generar ones PWM de alta precisió i gestionar el control del temps mort;
Unitat de Processament de Senyals de Retroalimentació: S'encarrega de l'adquisició i preprocesament de senyals com la corrent, la tensió i la posició;
Unitat de Protecció: Detecta i respon a fallades com sobrecorrent, sobretensió i sobrecalor per assegurar la seguretat del sistema.
El sistema adopta un disseny modular, amb mòduls funcionals interconnectats a través d'interfícies estandaritzades. Internament, la FPGA utilitza una arquitectura de dos dominis de rellotge: els algoritmes de control operen en un domini de rellotge de baixa freqüència per reduir el consum de recursos, mentre que el mòdul de generació de PWM opera en un domini de rellotge de alta freqüència per assegurar una temporització precisa i una alta resolució.
3.2 Optimització i implementació de l'algoritme de control PWM
Per aconseguir un control PWM de alta freqüència de alt rendiment, l'algoritme convencional de Modulació d'Amplada d'Impuls Vectorial (SVPWM) s'optimitza introduint un algoritme de control PWM millorat, expressat com:

on Ta és el temps de conducció de la part superior de la fase A; vα i vβ són les components de la tensió de referència en el sistema de coordenades α-β. Aquest algoritme s'implementa en la FPGA utilitzant una arquitectura de pipeline, transformant els complexos càlculs trigonomètrics en operacions lineals simples. Això redueix significativament la latència de càlcul i permet l'execució en un sol cicle. Per optimitzar el control del temps mort, s'adopta una estratègia de compensació adaptativa del temps mort.
3.3 Prova i anàlisi del rendiment del sistema
Per avaluar la superioritat de l'esquema propost d'implementació de PWM de alta freqüència (en endavant, "esquema propost"), es compara amb una implementació convencional basada en DSP (en endavant, "esquema convencional"). La plataforma de prova es construeix sobre una FPGA Xilinx Artix-7 i un DSP TMS320F28379D, utilitzant topologies de circuit i mòduls de potència idèntics (MOSFET de SiC de 1200 V/50 A). Les mètriques de rendiment inclouen la Distorsió Harmònica Total (THD) de la tensió de sortida, el temps de resposta dinàmica, el factor de potència i l'eficiència del sistema. Cada prova es repeteix tres vegades, amb resultats mitjats per assegurar la fiabilitat.
Com es mostra a la Taula 1, l'esquema propost demostra avantatges significatius sobre l'esquema convencional en la majoria de les mètriques: la THD de la tensió de sortida es redueix del 8,63% al 5,33%, una millora del 38,2%; el temps de resposta dinàmica disminueix de 428 μs a 245 μs, una reducció del 42,5%; i el factor de potència augmenta de 0,91 a 0,98. Encara que l'eficiència del sistema només millora en un 0,1%, aquesta millora marginal encara és significativa atès que l'eficiència de base ja supera el 92%.

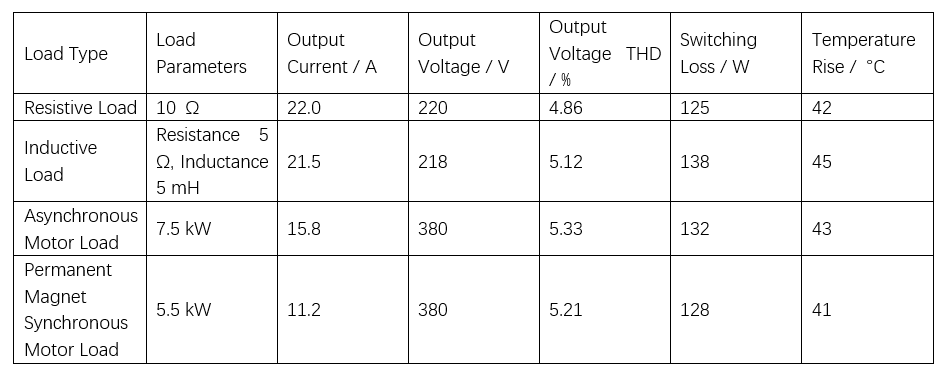
La viabilitat de l'esquema propost en condicions de càrrega variables es prova més endavant, amb resultats presentats a la Taula 2. Les proves cobreixen càrregues resistives, inductives i de motor. Els resultats mostren que l'esquema propost manté un rendiment estable en tots els tipus de càrrega: la variació de la THD de la tensió de sortida només és de 0,47%, demostrant una excel·lent robustesa de l'algoritme de control; les pèrdues de commutació es mantenien entre 125 W i 138 W, amb una fluctuació del 10,4%, indicant una gestió eficaç de la potència; i l'increment de temperatura es manté entre 41–45 °C, confirmant una estabilitat tèrmica superior.
4 Conclusió
La tecnologia PWM de alta freqüència és un element clau per millorar el rendiment dels inversors, però la seva implementació en els sistemes de control elèctric presenta diversos reptes tècnics. Aquest article aborda qüestions crítiques com les pèrdues de commutació de alta freqüència, l'efecte del temps mort i el disseny del circuit de conducció, proposant solucions sistemàtiques i presentant un marc d'implementació basat en FPGA.
L'esquema propost ofereix alta precisió, baixa latència i un fort rendiment en temps real, millorant efectivament tant la resposta dinàmica com la precisió en estat estacionari. La recerca proporcion










