
À medida que a demanda por controle preciso em processos industriais continua a aumentar, a tecnologia tradicional de Modulação por Largura de Pulso (PWM) luta para atender aos requisitos de alto desempenho dinâmico e baixa distorção harmônica. Em contraste, a tecnologia PWM de alta frequência melhora a qualidade da forma de onda de saída e reduz as harmônicas do sistema ao aumentar a frequência do portador, otimizando assim o desempenho dos inversores. Consequentemente, equilibrar a eficiência e a confiabilidade do sistema ao aplicar a tecnologia PWM de alta frequência tornou-se um aspecto crítico no desenvolvimento da tecnologia de inversores.
1. Teoria Básica e Características Técnicas do PWM de Alta Frequência
A tecnologia PWM é a técnica central utilizada nos sistemas de controle elétrico de inversores para regular tensão e frequência. Ela gera sequências de pulsos comparando sinais de referência com sinais de portador e usa essas sequências de pulsos para controlar os estados de comutação dos dispositivos de potência, alcançando assim um controle preciso do fornecimento de energia à carga. No controle de inversores, o ciclo de trabalho D do PWM pode ser expresso em relação à amplitude do sinal de referência Vref e à amplitude do sinal de portador Vtri como segue:

A razão de modulação m é definida como a razão entre a amplitude do sinal de referência e a amplitude do sinal de portador. Ela influencia diretamente o valor eficaz e as características harmônicas da tensão de saída. A expressão para essa razão é:

A frequência do portador fc refere-se à frequência da onda triangular usada para gerar o sinal PWM. Seu valor afeta diretamente a velocidade de resposta dinâmica do sistema e a distribuição das harmônicas de saída. A razão de frequência N é definida como a razão entre a frequência do portador e a frequência do sinal de referência, expressa como:

onde é a frequência do sinal de referência. A tecnologia PWM de alta frequência geralmente se refere a técnicas de controle PWM com uma frequência do portador superior a 10 kHz. Nos inversores modernos, com melhorias contínuas no desempenho dos dispositivos de potência, as frequências do portador chegaram a 20 kHz ou até mais altas. Ao aumentar a frequência do portador, os componentes harmônicos de saída são deslocados para faixas de frequência mais altas, facilitando a filtragem subsequente e reduzindo efetivamente o ruído e a vibração do motor.
Experimentos mostram que o aumento da frequência do portador de 5 kHz para 20 kHz pode reduzir o ruído do motor em 12-15 dB e diminuir o aumento de temperatura em 5-8 °C. À medida que a frequência do portador aumenta, a forma de onda de saída do PWM se aproxima cada vez mais de uma onda senoidal ideal, e a Distorção Harmônica Total (THD) é significativamente reduzida. Com uma frequência do portador de 20 kHz, a THD da tensão de saída do inversor cai para aproximadamente 5%, o que é consideravelmente melhor do que os 8%-12% típicos das técnicas PWM de baixa frequência. Além disso, o PWM de alta frequência oferece vantagens como resposta dinâmica mais rápida e maior precisão de controle.
2. Desafios Chave na Implementação do PWM de Alta Frequência e Suas Soluções
2.1 Perdas de Comutação Elevadas e Métodos de Mitigação
O problema mais proeminente com a tecnologia PWM de alta frequência é o aumento acentuado nas perdas de comutação. Como as perdas de comutação dos dispositivos de potência são proporcionais à frequência de comutação, a operação de alta frequência leva a uma redução na eficiência do sistema e a uma maior demanda de gerenciamento térmico. A perda de comutação Psw de um único módulo de Transistor Bipolar de Porta Isolada (IGBT) pode ser modelada como segue:

onde e são as perdas de energia de ligar e desligar, respectivamente; Err é a energia de recuperação reversa; Vdc é a tensão real do barramento DC; é a tensão de referência; é a corrente real; e Iref é a corrente de referência.
Para suprimir as perdas de comutação, as seguintes medidas podem ser adotadas:
Primeiro, usar dispositivos de potência avançados, como transistores de efeito de campo de óxido metálico de carbeto de silício (SiC MOSFETs), que oferecem características de comutação superiores aos IGBTs convencionais;
Segundo, otimizar o design do circuito do driver de porta usando técnicas de condução de rampa dupla para ajustar dinamicamente a resistência do gate durante as transições de comutação, equilibrando assim a velocidade de comutação e a interferência eletromagnética (EMI);
Finalmente, implementar técnicas de comutação suave, como topologias de comutação em tensão zero (ZVS) ou corrente zero (ZCS), para reduzir significativamente as perdas de comutação.
2.2 Efeito de Tempo Morto e Técnicas de Compensação
Na operação PWM de alta frequência, embora o tempo morto absoluto permaneça constante, sua proporção em relação ao período de comutação aumenta, tornando o efeito do tempo morto mais pronunciado. Isso pode levar à distorção da tensão de saída, ao desempenho de baixa velocidade degradado e ao aumento do ripple de torque. Para mitigar efetivamente esses problemas, algoritmos de compensação de tempo morto são empregados, expressos como:

3 Esquema de Implementação Baseado em FPGA para Tecnologia PWM de Alta Frequência
3.1 Design de Arquitetura do Sistema
O controle PWM de alta frequência impõe exigências mais elevadas sobre o desempenho em tempo real e a precisão de controle das plataformas de computação. Os Processadores Digitais de Sinal (DSPs) tradicionais frequentemente enfrentam limitações, como poder de computação insuficiente e latência significativa de interrupção, ao implementar PWM de alta frequência. Em contrapartida, as Matrizes de Portas Programáveis em Campo (FPGAs) são mais adequadas para tais aplicações devido às suas capacidades de processamento paralelo e flexibilidade de implementação em nível de hardware.
A arquitetura geral do sistema de controle PWM de alta frequência baseado em FPGA consiste em quatro módulos principais: a unidade de controle principal, a unidade de geração de PWM, a unidade de processamento de sinais de feedback e a unidade de proteção. Especificamente:
Unidade de Controle Principal: Executa algoritmos de controle em malha fechada, como loops de velocidade, corrente e posição;
Unidade de Geração de PWM: Responsável pela geração de formas de onda PWM de alta precisão e pelo gerenciamento do controle de tempo morto;
Unidade de Processamento de Sinais de Feedback: Lida com a aquisição e pré-processamento de sinais como corrente, tensão e posição;
Unidade de Proteção: Detecta e responde a falhas, como sobrecorrente, sobretensão e sobreaquecimento, para garantir a segurança do sistema.
O sistema adota um design modular, com módulos funcionais interconectados via interfaces padronizadas. Internamente, a FPGA utiliza uma arquitetura de dois domínios de clock: os algoritmos de controle operam em um domínio de clock de baixa frequência para reduzir o consumo de recursos, enquanto o módulo de geração de PWM opera em um domínio de clock de alta frequência para garantir timing preciso e alta resolução.
3.2 Otimização e Implementação do Algoritmo de Controle PWM
Para alcançar um controle PWM de alta frequência de alto desempenho, o algoritmo convencional de Modulação por Vetor Espacial (SVPWM) é otimizado introduzindo um algoritmo de controle PWM aprimorado, expresso como:

onde Ta é o tempo de condução da perna superior da Fase A; vα e vβ são os componentes da tensão de referência no sistema de coordenadas α-β. Este algoritmo é implementado na FPGA utilizando uma arquitetura pipeline, transformando cálculos trigonométricos complexos em operações lineares simples. Isso reduz significativamente a latência de computação e permite a execução em um único ciclo. Para otimizar o controle de tempo morto, uma estratégia de compensação adaptativa de tempo morto é adotada.
3.3 Teste e Análise do Desempenho do Sistema
Para avaliar a superioridade do esquema proposto de implementação de PWM de alta frequência (doravante denominado "esquema proposto"), ele é comparado com uma implementação convencional baseada em DSP (doravante denominada "esquema convencional"). A plataforma de teste é construída em uma FPGA Xilinx Artix-7 e um DSP TMS320F28379D, utilizando topologias de circuito e módulos de potência (1200 V/50 A SiC MOSFET) idênticos. As métricas de desempenho incluem a Distorção Harmônica Total (THD) da tensão de saída, o tempo de resposta dinâmica, o fator de potência e a eficiência do sistema. Cada teste é repetido três vezes, com os resultados médios para garantir a confiabilidade.
Como mostrado na Tabela 1, o esquema proposto demonstra vantagens significativas sobre o esquema convencional em grande parte das métricas: a THD da tensão de saída é reduzida de 8,63% para 5,33%, uma melhoria de 38,2%; o tempo de resposta dinâmica diminui de 428 μs para 245 μs, uma redução de 42,5%; e o fator de potência aumenta de 0,91 para 0,98. Embora a eficiência do sistema melhore apenas 0,1%, esse ganho marginal ainda é significativo, considerando a eficiência de base já alta, superior a 92%.

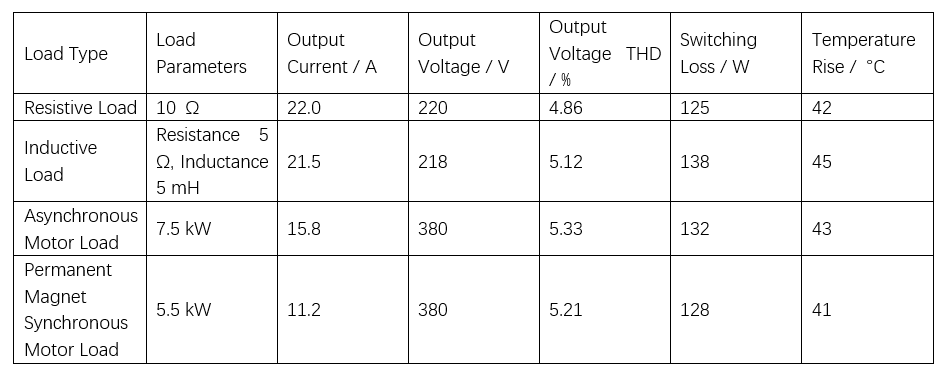
A viabilidade do esquema proposto sob condições de carga variadas é testada, com resultados apresentados na Tabela 2. Os testes abrangem cargas resistivas, indutivas e de motor. Os resultados mostram que o esquema proposto mantém um desempenho estável em todos os tipos de carga: a variação na THD da tensão de saída é apenas 0,47%, demonstrando excelente robustez do algoritmo de controle; as perdas de comutação são mantidas entre 125 W e 138 W, com uma flutuação de apenas 10,4%, indicando gestão de energia eficaz; e o aumento de temperatura é mantido dentro de 41-45 °C, confirmando estabilidade térmica superior.
4 Conclusão
A tecnologia PWM de alta frequência é um elemento-chave para melhorar o desempenho dos inversores, mas sua implementação em sistemas de controle elétrico enfrenta múltiplos desafios técnicos. Este artigo aborda questões críticas, como perdas de comutação de alta frequência, efeitos de tempo morto e design de circuitos de driver, propondo soluções sistemáticas e apresentando um framework de implementação baseado em FPGA.
O esquema proposto oferece alta precisão, baixa latência e forte desempenho em tempo real, melhorando efetivamente tanto a resposta dinâmica quanto a precisão em estado estacionário. A pesquisa fornece suporte técnico sólido para o controle de inversores de alto desempenho e possui amplo potencial de aplicação em campos como automação industrial, geração de energia renovável e veículos elétricos.










