
Kako se povećava potreba za preciznim upravljanjem u industrijskim procesima, tradicionalna tehnologija širine impulsa (PWM) teško uspe da ispuni zahteve za visoku dinamičku performansu i niske harmonijske distorzije. U suprotnosti, visokofrekventna PWM tehnologija unapređuje kvalitet izlazne talase i smanjuje sistemsku harmoniku povećanjem frekvencije nosača, time optimizujući performanse inverzora. Stoga je postala ključni aspekt razvoja tehnologije inverzora balansiranje efikasnosti sistema i pouzdanosti prilikom primene visokofrekventne PWM tehnologije.
1. Osnovna teorija i tehnički karakteristici visokofrekventne PWM
PWM tehnologija je ključna tehnika koja se koristi u električnim kontrolnim sistemima inverzora za regulaciju napona i frekvencije. Generiše se niz impulsa poređenjem referentnih signala sa nosačkim signalima, a ovi nizovi impulsa se koriste za kontrolu stanja prekidača snage, time ostvarujući precizno upravljanje snabdevanjem opterećenja. U kontroli inverzora, faktor punjenja D PWM-a može se izraziti u odnosu na amplitudu referentnog talasa Vref i amplitudu nosačkog talasa Vtri kao što sledi:

Odnos modulacije m definisan je kao odnos amplituda referentnog i nosačkog talasa. Direktno utiče na efektivnu vrednost i harmonijske karakteristike izlaznog napona. Izraz za ovaj odnos je:

Frekvencija nosača fc odnosi se na frekvenciju trougaonog talasa koji se koristi za generisanje PWM signala. Njegova vrednost direktno utiče na brzinu dinamičkog odgovora sistema i raspodelu izlaznih harmonika. Odnos frekvencija N definisan je kao odnos frekvencije nosača i frekvencije referentnog talasa, izražen kao:

gde je frekvencija referentnog talasa. Visokofrekventna PWM tehnologija obično se odnosi na tehnike PWM kontrole sa frekvencijom nosača preko 10 kHz. U modernim inverzorima, uz neprekidne poboljšanja performansi snage uređaja, frekvencije nosača su dostigle 20 kHz ili čak više. Povećanjem frekvencije nosača, harmonijske komponente izlaza pomeraju se u više frekvencijske opsege, omogućavajući kasniju filtraciju i efektivno smanjujući buku i vibracije motora.
Eksperimenti pokazuju da povećanje frekvencije nosača sa 5 kHz na 20 kHz može smanjiti buku motora za 12–15 dB i smanjiti porast temperature za 5–8 °C. Kao što se frekvencija nosača povećava, izlazni PWM talas sve više približava idealnom sinusoidnom talasu, a ukupna harmonijska distorzija (THD) se značajno smanjuje. Na frekvenciji nosača od 20 kHz, THD izlaznog napona inverzora pada na oko 5%, što je znatno bolje od 8%–12% tipičnih za tehnike niskofrekventne PWM. Takođe, visokofrekventna PWM nudi prednosti poput bržeg dinamičkog odgovora i veće tačnosti upravljanja.
2. Ključni izazovi u implementaciji visokofrekventne PWM i njihova rešenja
2.1 Visoke gubitke preključivanja i metode za njihovo smanjenje
Najznačajniji problem visokofrekventne PWM tehnologije jeste značajno povećanje gubitaka preključivanja. Budući da su gubitci preključivanja snage proporcionalni frekvenciji preključivanja, visokofrekventna operacija dovodi do smanjenja efikasnosti sistema i povećanih zahteva za termalnim menadžmentom. Gubitak preključivanja Psw jednog modula IGBT-a može se modelirati kao:

gde su i energetske gubitke pri uključivanju i isključivanju, redom; Err je energetski gubitak obrnutog oporavka; Vdc je stvarni DC bus napon; je referentni napon; je stvaran tok; a Iref je referentni tok.
Da bi se smanjili gubitci preključivanja, mogu se primeniti sledeće mere:
Prvo, korišćenje naprednih snaga uređaja, poput polusupravodnjih metal-oksidskih poluvodičkih tranzistora (SiC MOSFET), koji nude bolje karakteristike preključivanja u poređenju sa konvencionalnim IGBT-ovima;
Drugo, optimizacija dizajna pogonskih kola putem primene tehnika dvostrukog nagiba kako bi se dinamički podešavalo otpornost pogonskog kola tokom prelaza preključivanja, time balansirajući brzinu preključivanja i elektromagnetnu interferenciju (EMI);
Na kraju, implementacija tehnika meko preključivanja, poput topologija sa nultim naponom (ZVS) ili nultim tokom (ZCS), kako bi se značajno smanjili gubitci preključivanja.
2.2 Efekat mrtvog vremena i tehnike kompenzacije
Pod visokofrekventnom PWM operacijom, iako apsolutno mrtvo vreme ostaje konstantno, njegov odnos u odnosu na period preključivanja raste, čime se efekat mrtvog vremena čini značajnijim. To može dovesti do distorzije izlaznog napona, smanjene performanse na niskim brzinama i povećane oscilacije momента. Da bi se efektivno smanjili ovi problemi, koriste se algoritmi kompenzacije mrtvog vremena, izraženi kao:

3 Implementacioni okvir visokofrekventne PWM tehnologije baziran na FPGA
3.1 Dizajn arhitekture sistema
Visokofrekventna PWM kontrola postavlja veće zahteve za real-time performansu i tačnost izračunavanja platforme. Tradicionalni digitalni procesori signala (DSP) često suočavaju ograničenja kao što su nedovoljna računska moć i značajna latencija prekida kada se implementira visokofrekventna PWM. U suprotnosti, poluprogramabilni logički matrici (FPGA) su bolje prilagođene ovim aplikacijama zbog svojih paralelnih procesorskih sposobnosti i fleksibilnosti hardverske implementacije.
Ukupna arhitektura sistema visokofrekventne PWM kontrole baziranog na FPGA sastoji se od četiri ključna modula: glavna kontrolna jedinica, jedinica generisanja PWM, jedinica obrade povratnih signala i jedinica zaštite. Konkretno:
Glavna kontrolna jedinica: Izvršava algoritme zatvorene petlje, poput petlji brzine, toka i pozicije;
Jedinica generisanja PWM: Odgovorna je za generisanje visoko preciznih PWM talasa i upravljanje kontrolom mrtvog vremena;
Jedinica obrade povratnih signala: Rukuje akvizicijom i pretprocesiranjem signala, poput toka, napona i pozicije;
Jedinica zaštite: Detektuje i reaguje na greške, poput preopterećenja, prenapona i previsokih temperatura, kako bi osigurala bezbednost sistema.
Sistem koristi modularni dizajn, sa funkcionalnim modulima povezanima putem standardizovanih interfejsa. Unutrašnje, FPGA koristi arhitekturu sa dva domena satnih frekvencija: algoritmi kontrole rade u domenu niže frekvencije kako bi se smanjila potrošnja resursa, dok modul generisanja PWM radi u domenu visoke frekvencije kako bi se osigurala precizna vremenska rezolucija i visoka rezolucija.
3.2 Optimizacija i implementacija algoritma PWM kontrole
Da bi se ostvarila visokoperformantna visokofrekventna PWM kontrola, konvencionalni algoritam prostorne vektorske širine impulsa (SVPWM) je optimizovan uvođenjem poboljšanog algoritma PWM kontrole, izraženog kao:

gde je Ta vreme provodivosti gornje noge faze A; vα i vβ su komponente referentnog napona u α-&β; koordinatnom sistemu. Ovaj algoritam se implementira u FPGA koristeći arhitekturu sa pipeline-om, transformujući složene trigonometrijske izračune u jednostavne linearni operacije. Time se značajno smanjuje latencija izračunavanja i omogućava izvršenje u jednom ciklusu. Za optimizaciju kontrole mrtvog vremena, primenjuje se strategija adaptivne kompenzacije mrtvog vremena.
3.3 Testiranje i analiza performansi sistema
Da bi se procenila superiornost predloženog implementacionog okvira visokofrekventne PWM (u daljem tekstu "predloženi okvir"), on se poredi sa konvencionalnom implementacijom baziranom na DSP (u daljem tekstu "konvencionalni okvir"). Testna platforma je izgrađena na Xilinx Artix-7 FPGA i TMS320F28379D DSP, koristeći identične topologije strujnih krugova i snage modula (1200 V/50 A SiC MOSFET). Metrički pokazatelji uključuju ukupnu harmonijsku distorziju (THD) izlaznog napona, vreme dinamičkog odgovora, faktor snage i efikasnost sistema. Svaki test se ponavlja tri puta, a rezultati se prosekuju kako bi se osigurala pouzdanost.
Kao što je prikazano u Tabeli 1, predloženi okvir pokazuje značajne prednosti nad konvencionalnim okvirem po većini metrika: THD izlaznog napona se smanjuje sa 8,63% na 5,33%, što predstavlja poboljšanje od 38,2%; vreme dinamičkog odgovora se smanjuje sa 428 µs na 245 µs, što predstavlja smanjenje od 42,5%; a faktor snage se povećava sa 0,91 na 0,98. Iako se efikasnost sistema povećava samo za 0,1%, ovo marginalno poboljšanje je ipak značajno, uzimajući u obzir već visoku baznu efikasnost preko 92%.

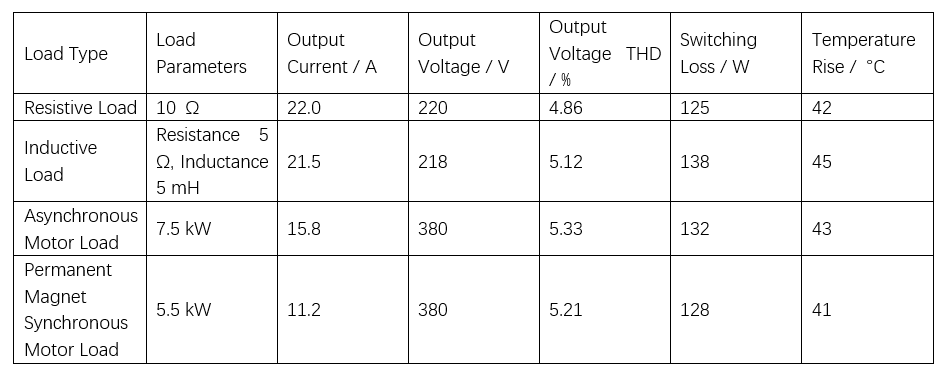
Fezibilnost predloženog okvira pod različitim opterećenjima se dalje testira, a rezultati su prikazani u Tabeli 2. Testovi obuhvataju opterećenja rezistivnog, induktivnog i motornog tipa. Rezultati pokazuju da predloženi okvir održava stabilnu performansu na svim tipovima opterećenja: promena THD izlaznog napona iznosi samo 0,47%, što pokazuje odličnu robustnost kontrolnog algoritma; gubitci preključivanja se održavaju između 125 W i 138 W, sa fluktuacijom od samo 10,4%, što ukazuje na efikasno upravljanje snagom; a porast temperature se održava u granicama 41–45 °C, potvrđujući superiornu termalnu stabilnost.
4 Zaključak
Visokofrekventna PWM tehnologija je ključni faktor unapređenja performansi inverzora, ali njena implementacija u električnim kontrolnim sistemima suočava se sa mnogo tehničkih izazova. Ovaj rad obrađuje ključne probleme, poput visokofrekventnih gubitaka preključivanja, efekta mrtvog vremena i dizajna pogonskih kola, predlaže sistem










