
Með því að biðlunin fyrir nákvæm stjórn á verkstæðakerfi hækka, hefur ekki lengur mögulegt verið að fullnæga kröfum fyrir há upplifun og lága harmónugreiningu með gamla plúsaþvera stýringu (PWM). Á móti þessu bætir háfrekis PWM-teknologi útvegarformi og minnkar greiningar í kerfinu með því að hækka frekann ræsisignalsins, sem leidir til aukinnar gildisverðs af snúningaraðgerðum. Þar af leiðandi hefur jafnvægi milli kerfisframlagshyggju og treystu verið mikilvægur hluti af þróun snúningaraðgerða.
1. Grunnkenningar og teknlegar eiginleikar háfrekis PWM
PWM-teknologi er grunnstæða aðferð í elektrískri stjórnunarskerfi snúningaraðgerða til að regla spennu og tíðni. Hún myndar plúsaröð með að samanburða viðmiðunarsignala við ræsisignala og notar þessa plúsaröð til að stjórna skiptistöðu af orkutækjum, þannig að nákvæm stjórn yfir orku til lagar sé náð. Í stjórnun snúningaraðgerða getur plúsaþveru D PWM verið lýst í tengslum við viðmiðunarsignals spennu Vref og ræsisignals spennu Vtri eins og hér fyrir neðan:

Röðunargildi m er skilgreint sem hlutfall viðmiðunarsignals spennu og ræsisignals spennu. Það á bein áhrif á virkt gildi og harmónueiginleika útvegarsspennum. Röðunargildið er lýst með:

Frekni ræsisignals fc merkir frekni þríhyrningshliðar sem notuð er til að mynda PWM-signalið. Frekinu mátti hafa bein áhrif á hraða svara kerfisins og dreifingu útvegarsharmóna. Frekanafylki N er skilgreint sem hlutfall frekans ræsisignals og frekans viðmiðunarsignals, sem er lýst með:

þar sem f1 er frekni viðmiðunarsignals. Háfrekis PWM-teknologi merkir PWM-stýrslugerð með frekni ræsisignals sem fer yfir 10 kHz. Með óhlífanlegum bættu framleiðsluorkutækja hefur frekni ræsisignals komið upp að 20 kHz eða hærri. Með því að hækka frekni ræsisignals, eru útvegarsharmónur færðar yfir í hærri frekanabili, sem gengur greinilega saman við síðari siftingu og minnkar hreyfingar og dýfla hjartar.
Rannsóknir sýna að með því að hækka frekni ræsisignals frá 5 kHz til 20 kHz, er hægt að minnka hreyfingar hjartar um 12-15 dB og lægri hitastigi um 5-8 °C. Sem frekni ræsisignals hækkar, nær PWM-útvegar formi nánar til fullkomins sínuslínur, og almennt harmónugreining (THD) lækkar. Við frekni ræsisignals 20 kHz, falla THD snúningaraðgerðar útvegarsspenna niður til um 5%, sem er betri en 8-12% sem er venjuleg við lágfrekan PWM-aðferðir. Auk þess býða háfrekis PWM vinnubóna eins og flottri svarhraða og hærri stjórnunarnákvæmni.
2. Aðalvandamál við framkvæmd háfrekis PWM og lausnir þeirra
2.1 Hár ofbýlisofbeldi og aðferðir til að munu þeim
Mest fremur aðalvandamál með háfrekis PWM-teknologi er hár ofbýlisofbeldi. Þar sem ofbýlisofbeldi orkutækja er samhverfa frekanum, leiðir háfrekan til lægrar kerfisframlags og hærri kröfu um hitastjórnun. Ofbýlisofbeldi Psw einstaka IGBT-einingar getur verið lýst með:

þar sem Eon og Eoff eru ofbýlisofbeldi við að skipta á og af, Err er ofbýlisofbeldi við afturbót, Vdc er raunveruleg DC-buss spenna, Vref er viðmiðunarspenning, Ic er raunveruleg straumur, og Iref er viðmiðunarstraumur.
Til að munu ofbýlisofbeldi, má taka eftirfarandi aðferðir:
Fyrst, nota á fyrirspurnar orkutækjum eins og Silicon Carbide Metal-Oxide-Semiconductor Field-Effect Transistors (SiC MOSFETs), sem bera betri ofbýlisofbeldi en venjuleg IGBT;
Önnur, optimaða gatadraivaraferils hönnun með tvöhnitum draivaraferils til að dyna stilla gataviðstand við skiptingar, sem jafnar á skiptahraða og elektromagnética störf (EMI);
Síðan, setja í verk blaut skiptingaraðferð, eins og zero-voltage switching (ZVS) eða zero-current switching (ZCS) topologies, til að munu ofbýlisofbeldi.
2.2 Dead-Time áhrif og lausnir
Undir háfrekis PWM keyrslu, þrátt fyrir að absoluð dead-time sé sama, er hlutfallið hans við skiptingartíma hækkar, sem gerir dead-time áhrif fleiri. Þetta getur leitt til útvegarsspennu skekks, lægra hraða framleiðslu og hærri torque ripple. Til að munu þessu efni, er notað dead-time breytingaraðferð, sem er lýst með:

3 FPGA-based skipulag fyrir háfrekis PWM-teknologi
3.1 Skipulag kerfisins
Háfrekis PWM-stýring leggur hærra kröfur á rauntímaframleiðslu og stjórnunarnákvæmni reikningarkerfa. Venjuleg DSP-er standa oft fyrir takmarkanir eins og ekki nægjanlegt reiknungarkraft og mjög langa undirbrotstíma við að framkvæma háfrekis PWM. Á móti því eru Field-Programmable Gate Arrays (FPGAs) betri val fyrir slíkar aðferðir vegna sínar paralells reikningskrafts og hæfileika á að framkvæma í hólmi.
Almennt skipulag FPGA-based háfrekis PWM-stýrslukerfisins består af fjórum kerrulegum einingum: aðalstýrslueining, PWM-myndunareining, endurtekningarsignalyrkingareining, og tryggðareining. Sérstaklega:
Aðalstýrslueining: Framkvæmir lokasvörpunarreikninga eins og hraða, straums, og staðsetningar lykkjur;
PWM-myndunareining: Er aðsökun fyrir að mynda háupplifun PWM-form og stjórna dead-time stýrslu;
Endurtekningarsignalyrkingareining: Skýrir söfnun og fyrirberiefni af signum eins og straum, spenna, og staðsetningu;
Tryggðareining: Greinir og svarar við villur eins og ofstraum, ofspenna, og ofhitu til að tryggja öryggi kerfisins.
Kerfið notar skipulagsaðferð, með virkseisdæmi tengd via standardaðgreiningar. Innan FPGA-notkun er tvöhnituhlutskipulag: stýrslureikningar eru keyrðir í lágfreknu hniti til að minnka notkun af auðlindum, en PWM-myndunareiningin keyrir í háfreknu hniti til að tryggja nákvæm tíming og háupplifun.
3.2 Optimum og framkvæmd PWM-stýrslureiknings
Til að ná háupplifun háfrekis PWM-stýrslu, er venjuleg Space Vector Pulse Width Modulation (SVPWM) reikningsaðferð optimað með innleiðingu aðferðar sem er lýst með:

þar sem Ta er leitartími efstu legs Phase A; vα og vβ eru viðmiðunarspennum í α-β koordinatskerfi. Þessi reikningsaðferð er framkvæmd í FPGA með pipelined skipulagi, sem brotar sérlega trigonometriske reikninga í einfaldar línulegar aðgerðir. Þetta minnkar reikningstíma marktæklega og leyfir aðgerð í einu hlið. Til að optima dead-time stýrslu, er tekin til adaptive dead-time breytingaraðferð.
3.3 Próf og greining á kerfinu
Til að meta förmun FPGA-based háfrekis PWM-stýrslukerfis (hér eftir nefnd „fyrirspurn“), er hann sameinaður við venjulegt DSP-based framkvæmdi (hér eftir nefnd „venjulegt“). Prófplattan er byggð á Xilinx Artix-7 FPGA og TMS320F28379D DSP, með sama orkustigi skemmunum og orkutækjum (1200 V/50 A SiC MOSFET). Prófmetillir eru útvegarsspenna Total Harmonic Distortion (THD), svarhraða, orkufaktor, og kerfisframlag. Hvert próf er endurtekið trí sjöt, með meðaltöl til að tryggja öruggleika.
Svo sem sýnt er í töflu 1, sýnir fyrirspurn marktæk förmun yfir venjulegt á mestum metilm: útvegarsspenna THD lækkar frá 8.63% til 5.33%, 38.2% bætta; svarhraða lækkar frá 428 μs til 245 μs, 42.5% minnka; og orkufaktur hækkar frá 0.91 til 0.98. Ef þráður að kerfisframlag hækkar bara 0.1%, er þessi litill hækkun ennþá með merki vegna þess að upphafsgildið er hært yfir 92%.

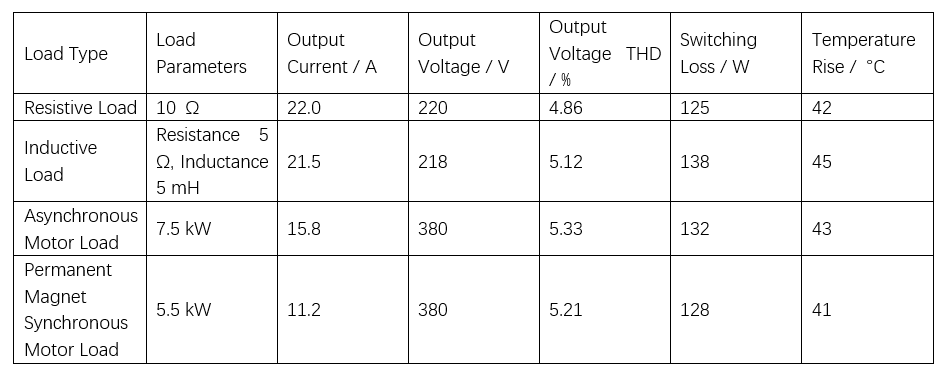
Próf á möguleika fyrirspurns við mismunandi lagaverði er framkvæmt, með niðurstöðum í töflu 2. Prófin hafa áhrif á motora, induktiva, og spenna lagaverð. Niðurstöður sýna að fyrirspurninn haldi staðfest framleiðslu við allar lagaverð tegundir: breytingar á útvegarsspenna THD eru bara 0.47%, sem sýnir góða robustness reikningsaðferðar; ofbýlisofbeldi eru haldið á milli 125 W og 138 W, með fluktúeringu bara 10.4%, sem sýnir efektíva orkustjórnun; og hitastigi er haldið á milli 41-45 °C, sem sýnir góða hitastöðu.
4 Afsléttur
Háfrekis PWM-teknologi er mikilvægur aðstoðarmaður til að bæta snúningaraðgerðarframleiðslu, en framkvæmd hennar í elektrískri stjórnunarkerfi kemur á mörg teknleg vandamál. Þessi ritgerð fjallar um mikilvæg vandamál eins og háfrekan ofbýlisofbeldi, dead-time áhrif, og gatadraivaraferils hönnun, með tilboðum systemaðferðar og FPGA-based framkvæmd.
Fyrirspurnin býður hágildi, lága tíma, og starka rauntímaframleiðslu, sem efektívt bætir bæði svarhraða og stöðugri nákvæmni. Rannsóknin gefur sterka teknlega stuðning fyrir háupplifun snúningaraðgerðarstýrslu og hefur víða notkunarmöguleika í svæðum eins og verkstæðaaðskilun, endurnýjanlegt orkurafmagn, og eldkarar.










