
Motus Inductionis Triphasici: Mechanismus Initiandi Sui et Methodi Initiandi
Motor inductionis triphasicus per se initiari potest. Cum alimentum electricum ad stator motoris inductionis triphasici coniungitur, agnitus magneticus rotans generatur. Hic agnitus magneticus rotans cum rotor interagendo eum movet ut incipiat rotare et operationem motoris inductionis initiet. Tempore initiandi, labes motoris est aequalis uni, et currentis initiandi magnitudo est significanter alta.
Officium initiatoris in motore inductionis triphasico ultra simplicem initiationem extenditur. Duas functiones primarias servat:
Sunt duae methodi fundamentales ad initiandum motorem inductionis triphasicum. Unus modus involvit coniunctionem motoris directe ad plenum alimentum voltage. Alter modus requirit applicationem voltage reducti ad motorem tempore initiandi. Notandum est quod torque productus ab inductione motore proportionalis est quadrato voltage applicati. Consequentia, motor multo plus torque generat quando incepit ad pleno voltage comparatus ad quando incepit cum voltage reducto.
Pro motoribus inductionis gregariis, qui latissime in usibus industrialibus et commercialibus utuntur, sunt tres methodi principales initiandi:

Methodi Initiandi pro Motoribus Inductionis
Direktus Inceptor
Methodus initiandi directus (DOL) pro motoribus inductionis celeberrima est pro simplicitate et cost-effective. Hoc modo, motor directe coniungitur ad plenum alimentum voltage. Haec methodus simplex saepe adhibetur pro motoribus parvis cum rating usque ad 5 kW. Uti DOL inceptor pro his motoribus minoribus, fluctuationes potentialis in alimentum voltage minuuntur, stabilem operationem systematis electrici assecurantes.
Stella-Delta Inceptor
Inceptor stella-delta unus est ex communitatibus et amplissimis adoptatis pro initiando motoribus inductionis triphasicos. In operatione normali, windings statoris motoris configurantur in connectione delta. Tamen, tempore initiandi, windings initio coniunguntur in configuratione stellae. Haec connectio stellae voltagerum applicatarum ad singulos windings reducit, sic limitans currentem initiandi. Postquam motor sufficiens velocitatem adeptus est, windings tunc convertuntur in connectionem delta, permitentes motori operari ad suam plenam rated performance.
Autotransformer Inceptor
Autotransformers uti possunt in configurationibus stellae coniunctis vel delta coniunctis. Prima functio eorum in contextu initiandi motoris inductionis est limitare currentem initiandi. Regulando ratio turns autotransformer, voltage suppeditatum ad motorem tempore initiandi reduci potest. Haec reductio controlata voltage iuvat mitigare altum currentem inrush quod accidit quando motor primum energizatur, protecta simul motor et systemate electrico suppleto.
Directus on-line, stella-delta, et autotransformer initiatores specialiter designantur pro motoribus inductionis gregariis, qui frequentissimi sunt in variis usibus industrialibus et commercialibus propter constructionem robustam et operationem fidelis.
Methodus Initiandi Motoris Inductionis Ring Slip
Pro motoribus inductionis ring slip, processus initiandi involvit coniunctionem pleni alimenti voltage trans inceptor. Designum unicorum motorum ring slip, cum circuitis externis rotor, permittit controllem additionalis tempore initiandi. Diagramma connectionis inceptoris motoris inductionis ring slip praebet representationem visualem de quo modo diversa componentia interagunt ad facilitandam processum initiandi, melius intellegendi operationem et mechanismos controllem.
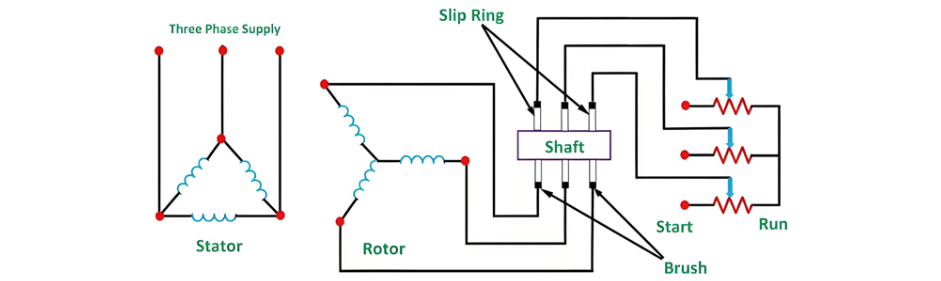
Initiando motorem inductionis ring slip, tota resistencia initiandi initio coniungitur in circuitu rotor. Hoc effecte redigit currentem suppeditatum a stator, minimizans currentem inrush qui aliter systema electricum et ipsum motorem pressuraret. Ut electrical supply motor energizat, rotor coepit rotare.
Quo motor accelerat, resistentiae rotor systematice reducuntur in stagis. Haec graduali excisio resistentiarum diligenter coordinatur cum incremento rotationis motoris. Sic faciendo, motor potest leniter augere suam velocitatem retinendo characteres optimales torque.
Postquam motor ad suam rated full-load velocitatem pervenit, omnes resistentiae initiandi complete removuntur a circuito. Hoc tempore, ring slips short-circuitantur. Haec short-circuiting permittit motori operari cum maxima efficacia, quia eliminat resistentiam additam quae necessaria erat solum tempore initiandi, motori sinendo ut suam full-rated performance praestet.










