
삼상 유도 전동기: 자체 시작 메커니즘 및 시작 방법
삼상 유도 전동기는 본질적으로 자체 시작이 가능합니다. 삼상 유도 전동기의 스태터에 전원 공급이 연결되면 회전 자기장이 생성됩니다. 이 회전 자기장은 로터와 상호 작용하여 로터가 회전을 시작하고 유도 전동기의 작동을 시작합니다. 시작 순간에는 모터 슬립이 1이며, 시작 전류는 매우 높습니다.
삼상 유도 전동기에서 스타터의 역할은 단순히 시작하는 것 이상으로 두 가지 주요 기능을 수행합니다:
삼상 유도 전동기를 시작하는 두 가지 기본적인 접근법이 있습니다. 하나는 모터를 전체 공급 전압에 직접 연결하는 방법이고, 다른 방법은 시작 시 모터에 낮은 전압을 적용하는 것입니다. 유도 전동기가 생성하는 토크는 적용된 전압의 제곱에 비례하기 때문에, 전체 전압으로 시작했을 때보다 낮은 전압으로 시작했을 때 훨씬 더 많은 토크를 생성합니다.
산업 및 상업용으로 널리 사용되는 케이지 유도 전동기에 대한 세 가지 주요 시작 방법은 다음과 같습니다:

유도 전동기의 시작 방법
직접 연결 스타터
유도 전동기의 직접 연결(DOL) 스타터 방법은 간단하고 비용 효율적이기로 알려져 있습니다. 이 방법에서는 모터가 전체 공급 전압에 직접 연결됩니다. 이 직관적인 방법은 일반적으로 5kW 이하의 작은 모터에 사용됩니다. DOL 스타터를 사용함으로써 이러한 작은 모터의 공급 전압 변동을 최소화하여 전기 시스템의 안정적인 작동을 보장할 수 있습니다.
스타-델타 스타터
스타-델타 스타터는 삼상 유도 전동기를 시작하는 가장 일반적이고 널리 채택된 방법 중 하나입니다. 일반적으로 모터의 스태터 와인딩은 델타 연결로 구성됩니다. 그러나 시작 단계에서는 와인딩이 처음에 스타 연결로 구성됩니다. 이 스타 연결은 각 와인딩에 적용되는 전압을 줄여서 시작 전류를 제한합니다. 모터가 충분한 속도를 얻으면 와인딩이 델타 연결로 전환되어 모터가 최대 정격 성능으로 작동할 수 있게 됩니다.
오토포머 스타터
오토포머는 스타 연결 또는 델타 연결 구성을 모두 사용할 수 있습니다. 유도 전동기 시작과 관련하여 오토포머의 주요 기능은 시작 전류를 제한하는 것입니다. 오토포머의 회전비를 조정함으로써 모터에 공급되는 시작 전압을 줄일 수 있습니다. 이렇게 제어된 전압 감소는 모터가 처음 전력 공급을 받을 때 발생하는 고속 인러시 전류를 완화하여 모터와 전기 공급 시스템을 보호합니다.
직접 연결, 스타-델타, 오토포머 스타터는 견고한 구조와 신뢰성 있는 작동으로 산업 및 상업용 다양한 응용 분야에서 널리 사용되는 케이지 로터 유도 전동기에 특별히 설계되었습니다.
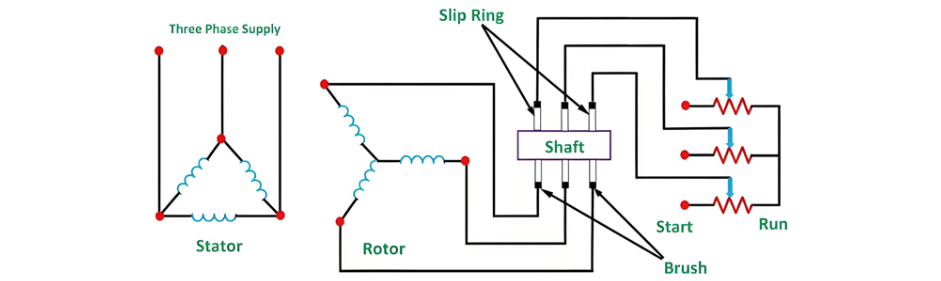
슬립 링 유도 전동기 스타터 방법
슬립 링 유도 전동기의 시작 과정은 스타터에 전체 공급 전압을 연결하는 것을 포함합니다. 슬립 링 모터의 독특한 설계는 외부 로터 회로를 통해 시작 시 추가적인 제어가 가능합니다. 슬립 링 유도 전동기 스타터의 연결 다이어그램은 각 구성 요소가 어떻게 상호 작용하여 시작 과정을 촉진하는지를 시각적으로 표현하여 작동 및 제어 메커니즘을 더 잘 이해할 수 있게 합니다.
슬립 링 유도 전동기를 시작할 때, 로터 회로에 전체 시작 저항이 초기에 연결됩니다. 이렇게 함으로써 스태터가 소비하는 공급 전류가 줄어들어, 그렇지 않으면 전기 시스템과 모터 자체에 스트레스를 줄 수 있는 인러시 전류를 최소화합니다. 전기 공급이 모터를 활성화하면서 로터가 회전을 시작합니다.
모터가 가속하면서 로터 저항은 단계적으로 줄어듭니다. 이러한 저항의 점진적인 제거는 모터의 회전 속도 증가와 조화롭게 이루어집니다. 이를 통해 모터는 최적의 토크 특성을 유지하면서 원활하게 속도를 높일 수 있습니다.
모터가 정격 만재 속도에 도달하면 모든 시작 저항이 회로에서 완전히 제거됩니다. 이 시점에서 슬립 링이 단락됩니다. 이러한 단락은 시작 단계에서만 필요한 추가 저항을 제거하여 모터가 최대 효율로 작동할 수 있도록 하며, 모터가 정격 성능을 발휘할 수 있게 합니다.










