
Автоматичний регулятор напруги керує постачальним напругом. Напруга стабілізується після перетворення. Основною причиною коливань напруги є зміна навантаження в системі живлення. Обладнання електромережі пошкоджується через коливання напруги.

Встановлення приладів контролю напруги в різних місцях, таких як близько до
трансформаторів,
генераторів,
провідників тощо,
допоможе регулювати коливання напруги.
Регулятор напруги доступний у декількох точках електромережі для регулювання коливань напруги.

У системі живлення постійного струму, якщо провідники всі однакової довжини, напругу можна налаштувати за допомогою кількох комбінованих генераторів; однак, якщо провідники мають різні довжини, використовується підсилювач провідника, щоб підтримувати сталу напругу на кінці кожного провідника. Напруга системи змінного струму може регулюватися за допомогою різних методів, включаючи
підсилювачі трансформаторів,
индуктивні регулятори,
конденсатори паралельно, тощо.
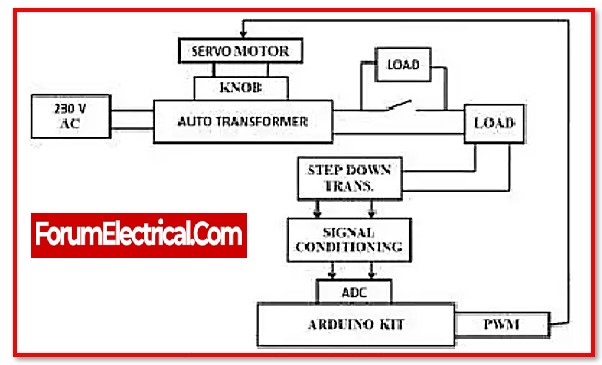
Частину обмотки однофазного автотрансформатора ділять первинна і вторинна обмотки. У двообмотковому трансформаторі первинна і вторинна обмотки електрично ізольовані, але не в умовах автотрансформатора. Якщо напруга зростає, AVR виявляє це, порівнює з еталонною напругою і генерує сигнал помилки. Цей сигнал помилки потім передається сервомотору через PWM-сигнал за допомогою Arduino.
Оскільки сервомотор і автотрансформатор з'єднані, коли серво виявляє вихідний сигнал Arduino, обидва обертаються автоматично завдяки з'єднанню. Коли напруга падає одночасно з тим, як сервомотори виявляють помилки, їх з'єднання збільшує рівень напруги, що означає, що однофазний автотрансформатор у цій умові функціонує як система BUCK BOOST.

Сервомотор схожий на ДП-мотор і має деякі додаткові спеціальні частини, які перетворюють ДП-мотор на серво. Малий ДП-мотор, потенціометр, механізм передачі і сучасна електроніка є компонентами серво-блока. Серво обертається, з'єднаний з основними схемами і потенціометром.

На сервомоторі є вихідний вал. Відправка кодованого сигналу до серво дозволяє цьому валу переміщатися на різні кутові позиції. Сервомотор буде зберігати кутову позицію вала, поки сигнал є на вхідній лінії. Якщо сигнал змінюється, кутова позиція вала також змінюється.
Оскільки блок формування сигналу потребує низького рівня напруги, використовується трансформатор пониження напруги, щоб знизити 230 В до 5 В. Трансформатор знижує рівень напруги для прямокутного перетворення.
Формування сигналу — це процес перетворення аналогового сигналу, щоб він задовольняв вимоги для наступного рівня обробки. Аналогово-цифрові перетворювачі найчастіше використовуються на етапі формування сигналу. Для здійснення підсилення сигналу використовуються операційні підсилювачі.
Підключивши його, можна використовувати мережевий джерел











{kind=link}
{kind=link}
{kind=link}