
Un regulador automàtic de tensió controla la tensió d' alimentació. La tensió es estabilitza després de ser convertida. La variació de càrrega en el sistema d' alimentació és la causa principal de les fluctuacions de tensió. L'equipament del sistema d'energia es veu afectat per aquestes variacions de tensió.

Instal·lar instruments de control de tensió en diversos llocs, com a prop de
Transformadors,
Generadors,
Línies d'alimentació, etc.,
ajudarà a regular les variacions de tensió.
El regulador de tensió està disponible en diversos punts del sistema d'energia per regular les fluctuacions de tensió.

En un sistema d'alimentació DC, si les línies d'alimentació tenen totes la mateixa longitud, la tensió es pot ajustar utilitzant diversos generadors compostos; però, si les línies d'alimentació tenen longituds diferents, s'utilitza un amplificador de línia per mantenir una tensió consistent al final de cada línia. La tensió d'un sistema AC es pot regular utilitzant diverses tècniques, incloent
Transformadors amplificadors,
Reguladors d'inducció,
Condensadors de derivació, etc.
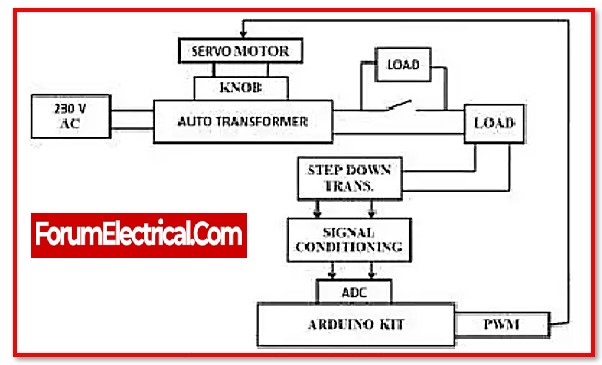
Una part de l'enrotllament de l'autotransformador monofàsic està dividida pel primari i secundari. En un transformador amb dos enrotllaments, els enrotllaments primari i secundari estan aïllats elèctricament, però no en el cas d'un autotransformador. Si la tensió augmenta, l'AVR la detecta, la compara amb la tensió de referència i genera un senyal d'error. Aquest senyal d'error es transmet al motor servo mitjançant un senyal PWM per l'Arduino.
Com que el motor servo i l'autotransformador estan connectats, quan el servo detecta una sortida de l'Arduino, tots dos giren automàticament degut a l'acoblament. Quan la tensió disminueix alhora que els motors servo detecten errors, el seu acoblament augmenta el nivell de tensió, el que implica que l'autotransformador monofàsic en aquesta condició funciona com un sistema BUCK BOOST.

Un motor servo és similar a un motor DC i té certs components addicionals especialitzats que transformen un motor DC en un servo. Un petit motor DC, un potenciòmetre, un arranjament de rodes i electrònica avançada són tots components d'una unitat servo. El servo gira acoblado a la circuitària principal i al potenciòmetre.

Hi ha un eix de sortida en un motor servo. Enviar un senyal codificat al servo permet moure aquest eix a diverses posicions angulars. El motor servo mantindrà la posició angular de l'eix mentre el senyal estigui present a la línia d'entrada. Si el senyal canvia, la posició angular de l'eix canvia.
Com que la unitat de condicionament de senyals necessita un nivell de tensió baix, es fa servir un transformador reductor per reduir 230 V a 5 V. El transformador redueix el nivell de tensió per a la rectificació.
El condicionament de senyals és el procés de transformar un senyal analògic perquè compleixi els requisits per al nivell posterior de processament. Les conversors analògic-digital són on es fa més sovint. En la fase de condicionament de senyals, s'utilitzen amplificadors operacionals per realitzar l'amplificació del senyal.
Connectant-lo, una font d'energia AC de la xarxa elèctrica es pot utilitzar per alimentar directament les taules Arduino. La funció del regulador de tensió és regular la tensió suministrada a la taula Arduino i mantenir les tensions CC utilitzades per la unitat de processament i altres components.
Funciona segons el principi de detecció d'errors. La tensió de sortida d'una font d'energia AC s'obté utilitzant un transformador de potencial, s'rectifica, després s'filtra i finalment es mesura contra un estàndard. La tensió d'error es defineix com la variància entre la tensió real i la de referència. Un amplificador llavors proporciona a l'excitador principal o pilot l'tensió d'error amplificada.
Per tant, els senyals d'error amplificats regulen la variació de tensió controlant l'acció de buck o boost utilitzada per estimular l'excitador principal o pilot. La tensió terminal de l'alternador principal es controla per la sortida de l'excitador.
Regula la tensió del sistema i apropa el funcionament de les màquines a un estat estable i constant.
Distribueix la càrrega reactiva entre els alternadors que funcionen en paral·lel.
Una reducció brusca de la càrrega en el sistema pot portar a sobretensions, que es redueixen pels reguladors de tensió automàtics.
Augmenta l'excitació del sistema durant les condicions de falla de manera que hi hagi la màxima potència de sincronització quan la falla s'elimini.
Les característiques d'un regulador automàtic de tensió de qualitat són les següents:
1). Regulació de Tensió
2). Rang de Tensió d'Entrada
3). Baixa Impedància
4). Compatibilitat amb la Càrrega
5). Precisió de Tensió











{kind=link}
{kind=link}
{kind=link}