
Ավտոմատ լարման կարգավորիչը կառավարում է էլեկտրաէներգիայի հոսքի լարմանը։ Լարումը կայունացվում է փոխակերպումից հետո։ Հոսքային համակարգում բեռնի փոփոխություններն են լարման դաշտային փոփոխությունների հիմնական պատճառը։ Էլեկտրաէներգետիկ համակարգի սարքավորումը վնասվում է լարման փոփոխությունների պատճառով։

Լարման կառավարման սարքավորումների տեղադրումը տարբեր վայրերում, օրինակ այն մոտ
Երկրաչափական ձևանոցներում,
Գեներատորներում,
Ֆիդերներում և այլն,
կօգնի կարգավորել լարման փոփոխությունները։
Լարման կարգավորիչը հասանելի է էլեկտրաէներգետիկ համակարգի մի շարք կետերում լարման դաշտային փոփոխությունները կարգավորելու համար։

Դիրեկտ հոսանքի համակարգում, եթե ֆիդերները բոլորը նույն երկարությունն են, լարումը կարող է կարգավորվել մի շարք կոմպոզիտ գեներատորների օգտագործմամբ. սակայն, եթե ֆիդերները բոլորը տարբեր երկարություններ ունեն, օգտագործվում է ֆիդերի բուստերը պահպանելու համար կանոնավոր լարումը յուրաքանչյուր ֆիդերի վերջում։ Միջանդամ հոսանքի համակարգի լարումը կարող է կարգավորվել տարբեր մեթոդներով, ներառյալ
Բուստեր ձեռնարկներ,
Ինդուկտիվ կարգավորիչներ,
Սեղմակի կոնդենսատորներ և այլն։
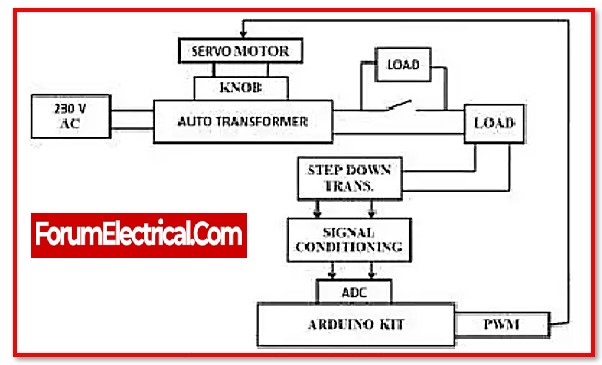
Միափաստակ ավտոտրանսֆորմատորի մի մասը բաժանվում է գլխավոր և երկրորդական միջոցով։ Երկու կոյունակներով տրանսֆորմատորում գլխավոր և երկրորդական կոյունակները էլեկտրականորեն են անկախ, բայց այդ պայմանը ավտոտրանսֆորմատորի դեպքում չի գործում։ Եթե լարումը ավելանում է, AVR-ն դա հայտնում է, համեմատում է այն անդամային լարման հետ և ստեղծում է սխալի սիգնալ։ Այդ սխալի սիգնալը հետո ուղարկվում է սերվո մոտորին PWM սիգնալի միջոցով Arduino-ի կողմից։
Քանի որ սերվո մոտորը և ավտոտրանսֆորմատորը կապված են, երբ սերվոն հայտնում է Arduino-ի ելք, երկուսն էլ ավտոմատ պտտվում են կապի պատճառով։ Որպեսզի լարումը նվազի և սերվո մոտորները հայտնում են սխալներ, նրանց կապը ավելացնում է լարման մակարդակը, որը նշանակում է, որ 1-փաստակ ավտոտրանսֆորմատորը այս պայմաններում գործում է որպես BUCK BOOST համակարգ։

Սերվո մոտորը նման է դիրեկտ հոսանքի մոտորին և ունի որոշ լրացուցիչ հատուկ նպատակով բաղադրիչներ, որոնք դիրեկտ հոսանքի մոտորը ձևափոխում են սերվո մոտորի։ Փոքր դիրեկտ հոսանքի մոտորը, պոտենցիոմետրը, տուրայի կազմակերպումը և առաջարկված էլեկտրոնիկան սերվո միավորի բոլոր բաղադրիչներն են։ Սերվոն պտտվում է կապված հիմնական շղթաների և պոտենցիոմետրի հետ։

Սերվո մոտորում կա ելքային առանցք։ Կոդավորված սիգնալի ուղարկումը սերվոյին թույլ է տալիս այդ առանցքը շարժել տարբեր անկյունային դիրքերում։ Սերվո մոտորը կպահպանի առանցքի անկյունային դիրքը, որքան սիգնալը կա մուտքային գծի վրա։ Եթե սիգնալը փոխվում է, առանցքի անկյունային դիրքը փոխվում է։
Քանի որ սիգնալի պարամետրերը պահանջում են ցածր լարման մակարդակ, օգտագործվում է ներքևում բերող տրանսֆորմատորը 230 V-ը 5 V-ի ներքև բերելու համար։ Տրանսֆորմատորը ներքև է բերում լարման մակարդակը ուղղագիծ հաշվարկի համար։
Սիգնալի պարամետրերը անալոգ սիգնալը փոխում են այնպես, որ այն բավարարի հաջորդ մակարդակի մշակման պահանջներին։ Ամենահաճախ օգտագործվում է անալոգ-դիջիտալ կոնվերտերներում։ Սիգնալի պարամետրերի մակարդակում օպերացիոն մեծացուցիչները օգտագործվում են սիգնալի մեծացման համար։
Այն կապելով, կարող է օգտագործվել միջանդամ հոսանքի հիմնական էլեկտրաէներգիայի աղյուսակը որպես էլեկտրաէներգիայի աղյուսակ Arduino կարտերի համար։ Լարման կարգավորիչի գործողությունը կարգավորել է լարումը, որը ներկայացվում է Arduino կարտին և պահպանում է այն դիրեկտ հոսանքի լարման մակարդակները, որոնք օգտագործվում են մշակման միավորում և այլ բաղադրիչներում։











{kind=link}
{kind=link}
{kind=link}